1
Изобретение относится к области автоматического управления и может использовано для управления загрузкой железнодорожных вагонов коксом на коксохимических производствах.
Известно устройство управления загрузкой, содержащее датчики, блок управления приводом автостеллы и ее транспортером, дополнительный датчик загрузки бункеров, выполненный в виде гамма-реле, выходные контакты которого и блока программирования через блок выдачи команд подключены к блоку управления приводом автостеллы и ее транспортером 1.
Недостатком такого устройства является неполная автоматизация процесса загрузки.
Наиболее близким техническим решением к данному изобретению является устройство автоматической погрузки кокса в вагоны, содержащее реверсивный пускатель, подключенный через первичную обмотку трансформатора к приводу перемещения вагонов, связанному тросом с тележкой, соединенной с колесной парой одного из вагонов, два датчика заполнения, два датчика начала и датчик окончания загрузки, связанные с соответствующими источниками излучения и подключенные к первым пяти входам блоков управления перемещением вагонов и загрузкой, шестой вход блока управления загрузкой подключен к датчику высоты, а выходы подключены к приводам клапана желоба, конвейера и подвижного загрузочного узла, шестой вход блока управления перемещение.м вагонов подключен к вторичной обмотке трансформатора, а выход - к одному входу пускателя 2.
Недостатком известного устройства яв.1яется его низкая надежность, вызванная необходимостью введения данных в устройство о количестве загружаемых вагонов, возможными перемещениями вагонов в процессе загрузки, ограниченным количеством тинов загружаемых вагонов, отклонением уровня заполнения вагонов от оптимального.
Целью изобретения является повыщение надежности работы устройства.
Поставленная цель достигается тем, что в предлагаемое устройство введены датчики конца состава, блок управления холостым ходом перемещения вагонов и блсж торможения, датчики конца состава подключены к седьмому и восьмому входач блока управления загрузкой, блок управл«1ия холосты.м ходом перемещения вагонов включен параллельно блоку управления перемещением вагонов, входы блока торможения подключены к выходам датчиков заполнения вагонов, а выход - к другому входу реверсивного пускателя, а датчики высоты и окончания загрузки установлены на подвижном загрузочном узле.
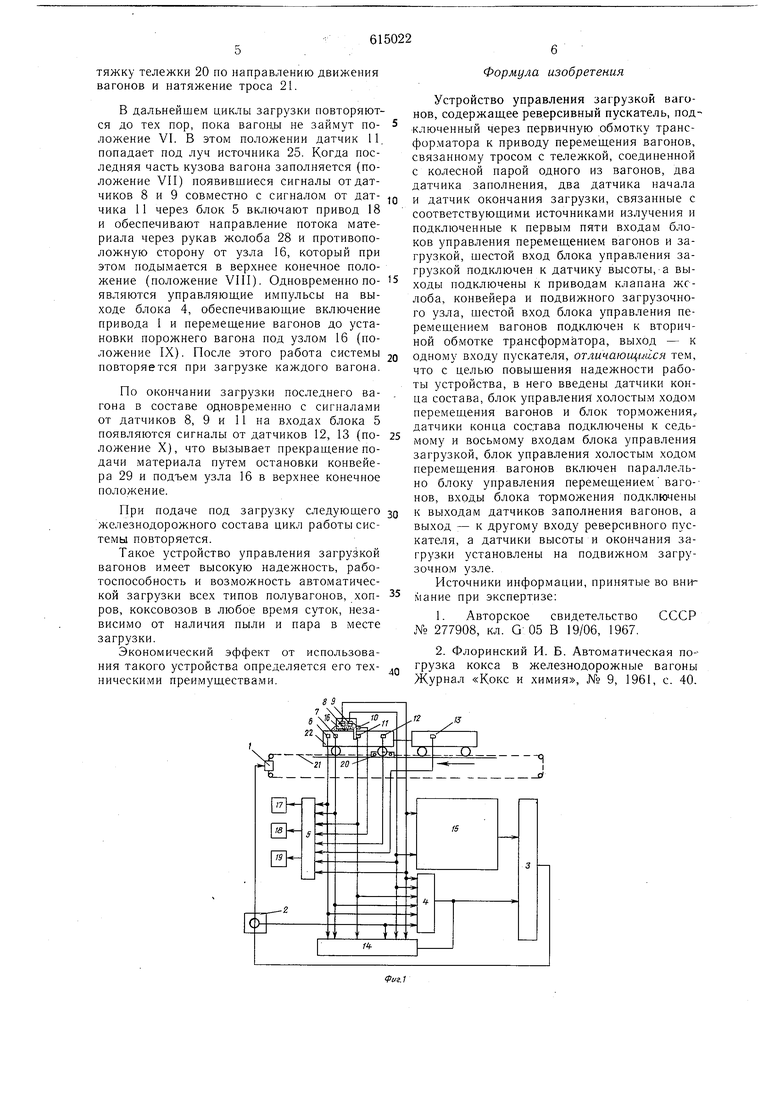
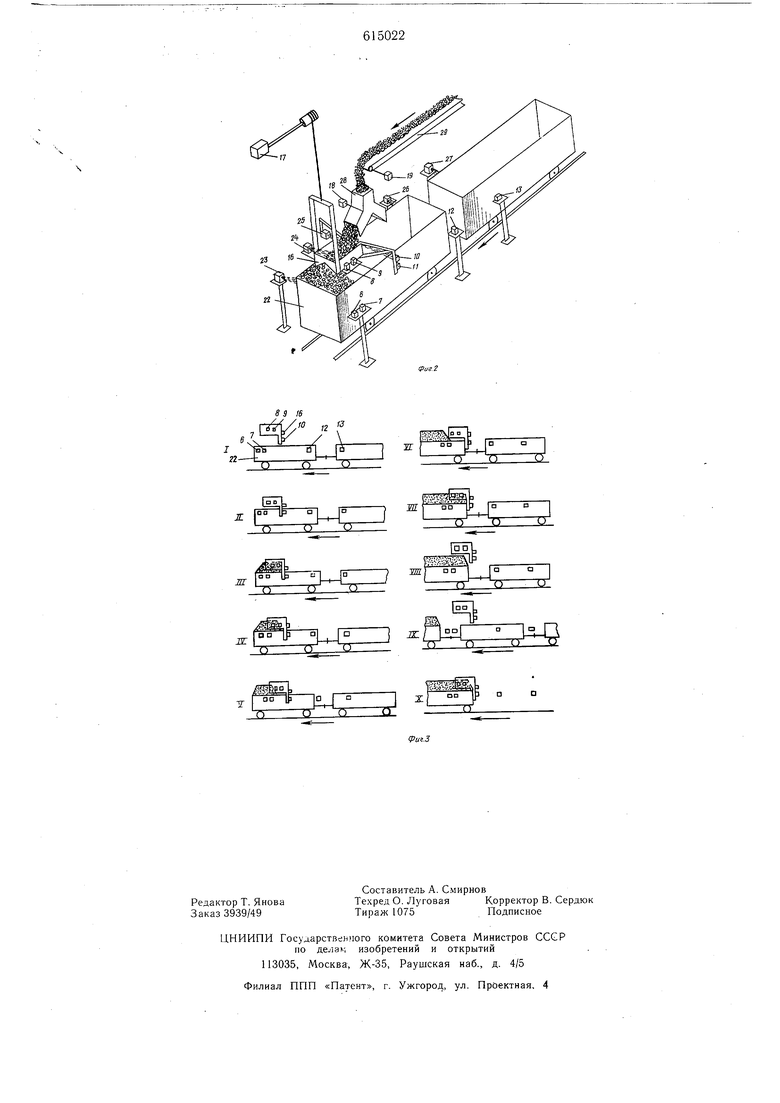
На фиг. 1 дана структурная схема предлагаемого устройства; на фиг.-2 - относительное расположение всех элементов устройства; на фиг. 3 - положение вагонов относительно подвижного узла в процессе загрузки.
Устройство содержит привод 1 перемещения вагонов, токовый трансформатор 2, реверсив-ный пускатель 3, блок 4 управления перемещением вагонов, блок 5 управления загрузкой, датчики 6 и 7 начала загрузки вагона, датчики 8 и 9 заполнения вагона, датчик 10 высоты вагона, датчик 11 окончания загрузки вагона, датчики 12 и 13 конца состава, блок 14 управления холос Тым ходом перемещения вагонов, блок 15 торможения вагонов, подвижный загрузочный узел 16, привод 17 подвижного загрузочного узла, привод 18 клапана двухрукавного жолоба, привод 19 конвейера, тележка 20.-перемещения вагонов, трос 21 перемещения вагонов, вагоны 22, источники23 -27 излучения, двухрукавный жолоб 28, конвейер 29.
В устройстве установлены радиоизотопные датчики, например гамма-релейные приборы (ГРП), имеющие два режима работы: негативный и позитивный (режим устанавливается с помощью выключателя). В позитивном режиме на выходе датчика появляется сигнал, когда датчик находится в луче источника, а в негативном - когда датчик перекрыт от луча источника. Датчики 6 и 7 начала загрузки и датчики 8 и 9 заполнения вагона работают в негативном режиме, а датчики 12 и 13 конца состава, датчики 10 высоты и датчик 11 окончания загрузки вагона - в позитивном.
Устройство управления загрузкой вагонов работает следующим образом.
Железнодорожный состав подается под загрузку и вагоны занимают положение 1 (фиг. 3). Вводят в зацепление тележку 20 с колесной парой одного из вагонов и включает устройство. По сигналам датчиковб и 7 включится конвейер 29 и материал начнет поступать в вагон 22 через рукав жолоба 28 в сторону подвижного загрузочного узла 16, который в этот момент опускается по сигналам датчиков 6, 7, 10 и 11 до тех пор, пока датчик I1 не перекроется от луча источника 25 кузовом вагона (положение II). Если узел 16 опускается ниже необходимого уровня, то и датчик 10 перекрывается от луча источника 25 кузовом вагона, что вызывает подъем узла 16 до необходи- мого уровня (когда датчик 10 находится в луче источника 25).
В ЭТОТ момент на выходе блока 14 управления холостым ходом передвижения вагонов появляется сигнал, который вызывает срабатывание реверсивного пускателя 3 и соответственно включение привода 1. Через первичную обмотку трансформатора 2 протекает ток, вызывающий появление сигнала на вторичной обмотке трансформатора и па входах блоков 4 и 14.
Блоки 4 и 14 формируют управляющие импульсы, длительность которых пропорциональна длительности пусковых токов, а следовательно, нагрузки привода 1: блок 14 - при натяжении троса и холостом ходе тележки 20, блок 4 - при перемещении тележки 20 с вагонами. На выходе блока 4 появляются управляющие импульсы при перекрытии датчиков 8 и 9 заполнения вагонов от луча источника 24 (поло-жение III), загружаемым материалом, а на выходе блока 14 - при отсутствии сигналов от датчиков 8 и 9, когда идет заполнение части кузова вагона под узлом 16. Наличие блока 14 холостого хдда позволяет к моменту заполнения части кузова вагона подтянуть тележку 20 зацепами вплотную к колесам и натянуть трос 21, в результате чего при заполнении вагона по сигналам датчиков 8 и 9 сразу начнется перемещение вагонов.
Наличие в цепи привода 1 токового трансформатора 2, подключенного к блокам 4 и 14 управления, позволяет автоматически регулировать длительность управляющих импульсов в зависимости от нагрузки привода 1,что обеспечивает равномерное пере.мещение тележки 20 и вагонов 22.
При заполнении части кузова вагона (положение III) на входах блока 4 управления появляются сигналы от датчиков 8 и 9. Блок 4 формирует при этом управляющие сигналы, в результате которых включается привод 1, и вагоны начинают перемещаться вперед. Как только датчик 9 попадает под луч источника 24 (положение IV) управляющие импульсы на выходе блока 4 исчезают, привод 1 выключается, вагоны перемещаются по инерции до положения V, при этом перемещении вагонов поочередно исчезают сигналы датчиков 8 и 9, что вызывает появление на выходе блока 15 тормозного импульса. Блок 15 автоматически изменяет длительность тормозного импульса в зависимости от скорости перемещения вагонов по инерции: чем больще скорость вагонов, тем больще длительность тормозного импульса. Тор.мозной импул с подается на вход реверсивного пускателя 3, последний включает привод 1 для перемещения тележки 20 назад. Тележка 20 своими зацепами упирается в колеса и вызывает остановку вагонов. Сразу по- исчезновении тормозного импульса появляются управляющие импульсы на выходе блока 14, которые обеспечивают включение привода 1, п,одтяжку тележки 20 по направлению движения вагонов и натяжение троса 21. В дальнейшем циклы загрузки повторяются до тех пор, пока вагоны не займут положение VI. В этом положении датчик 11. попадает под луч источника 25. Когда последняя часть кузова вагона заполняется (положение VII) появившиеся сигналы отдатчиков 8 и 9 совместно с сигналом от датчика 11 через блок 5 включают привод 18 и обеспечивают направление потока материала через рукав желоба 28 и противоположную сторону от узла 16, который при этом подымается в верхнее конечное положение (положение VIII). Одновременно появляются управляющие импульсы на выходе блока 4, обеспечивающие включение привода 1 и перемещение вагонов до установки порожнего вагона под узлом 16 (положение IX). После этого работа системы повторяется при загрузке каждого вагона. По окончании загрузки последнего вагона в составе одновременно с сигналами от датчиков 8, 9 и 11 на входах блока 5 появляются сигналы от датчиков 12, 13 (положение X), что вызывает прекращение подачи материала путем остановки конвейера 29 и подъем узла 16 в верхнее конечное положение. При подаче под загрузку следующего железнодорожного состава цикл работы сиетемы повторяется. Такое устройство управления загруЗкой вагонов имеет высокую надежность, работоспособность и возможность автоматической загрузки всех типов полувагонов, хоп- 35 ров, коксовозов в любое время суток, независимо от наличия пыли и пара в месте загрузки. Экономический эффект от использования такого устройства определяется его техническими преимуществами. Формула изобретения Устройство управления загрузкой вагонов, содержаш,ее реверсивный пускатель, подключенный через первичную обмотку трансформатора к приводу перемешения вагонов, связанному тросом с тележкой, соединенной с колесной парой одного из вагонов, два датчика заполнения, два датчика начала и датчик окончания загрузки, связанные с соответствуюндими источниками излучения и подключенные к первым пяти входам блоков управления перемещением вагонов и загрузкой, шестой вход блока управления загрузкой подключен к датчику высоты, а выходы подключены к приводам клапана жслоба, конвейера и подвижного загрузочноро узла, шестой вход блока управления перемешением вагонов подключен к вторич Qg обмотке трансформатора, выход - к одному входу пускателя, огл«чаюи / гся тем, что с целью повышения надежности работы устройства, в него введены датчики конца состава, блок управления холостым ходо.м перемещения вагонов и блок торможения,, датчики конца состава подключены к седьмому и восьмому входамблока управления загрузкой блок управления холостым ходом перемещения вагонов включен параллель Q управления перемещением ваго- входы блока торможения подключены к выходам датчиков заполнения вагонов, а выход - к другому входу реверсивного пускателя, а датчики высоты и окончания загрузки установлены на подвижном загрузочном узле. Источники информации, принятые во внимание при экспертизе: СССР j Авторское свидетельство № 277908, кл. G 05 В 19/06, 1967. 2. Флоринский И. Б. Автоматическая по-грузка кокса в железнодорожные вагоны Журнал «Кокс и химия, № 9, 1961, с. 40.
Фагг

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления погрузкой вагонов | 1977 |
|
SU697380A1 |
| Устройство для управления процессом загрузки шихты в угольную башню | 1989 |
|
SU1700049A1 |
| Устройство для управления бункером перегружателем проходческо-добычного комплекса | 1985 |
|
SU1268725A1 |
| Устройство контроля веса материала в бункерах | 1980 |
|
SU972243A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ ПОТОКОМ СЫРЬЕВЫХ КОМПОНЕНТОВ СТЕКОЛЬНОЙ ШИХТЫ | 1991 |
|
RU2026806C1 |
| Устройство управления дозированной загрузкой железнодорожных вагонов | 1987 |
|
SU1422017A1 |
| Устройство автоматического управленияуСТАНОВКОй для зАгРузКи ВАгОНОВдОзиРОВАННыМи пОРцияМи СыпучЕгОгРузА | 1979 |
|
SU814835A1 |
| Устройство управления дозированной загрузкой железнодорожных вагонов | 1982 |
|
SU1173190A1 |
| Устройство автоматического контроля веса материала в бункерах | 1985 |
|
SU1255870A1 |
| Устройство для управления загрузкой бункера-перегружателя проходческо-добычного комплекса | 1983 |
|
SU1176072A1 |
7 чХ
/
L
О о (3
ж
ОО
П.
