(54) САМОНАСТРАИВАЩИЙСЯ ПРИВОД
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система | 1981 |
|
SU1013910A1 |
| Самонастраивающийся регулятор для электропривода промышленного механизма | 1978 |
|
SU792215A1 |
| Самонастраивающаяся система управления | 1985 |
|
SU1249478A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| Устройство для сравнения амплитуд двух низкочастотных гармонических напряжений | 1983 |
|
SU1128199A1 |
| Бинарная система управления | 1983 |
|
SU1120284A1 |
| Следящая система | 1983 |
|
SU1123019A1 |
| Самонастраивающаяся система управления | 1979 |
|
SU845143A1 |
| Самонастраивающийся регулятор | 1981 |
|
SU960731A1 |
| Система управления | 1978 |
|
SU697974A1 |
Изобретение относится к системам, предназначенным для адаптивного управ ления нестационарным объектом при высоких требованиях к стабильности динамических свойств, качеству обработки внешних возмущений по моменту статических сопротивлений и быстродействию электропривода. Известно устройство, предназначенное для адаптивного управления нестационарными объектами, в котором сигналы с выхода фильтра и дифференцирую щего устройства выходного сигнала поступают по двум шинам в. делитель с памятью, где они делятся один на другой. Выходной сигнал делителя устанавливает коэффициент передачи устройства согласования Lla« Недостатком данной системы является предположение об известности входных воздействий и отсутствии низкочастотной переменной составляющей в полезном сигнале обратной связи. Однако в системах электропривода внешние возмущения по моменту статических сопротивлений являются неизвестными, а в полезном сигнале с выхода датчика скорости присутствует низкочастотная переменная составляющая, которая приводит к снижению быстродействия регулятора скорости из-за появления переменной составляющей в токе якоря с частотой пульсаций сигнала обратной связи по скорости. Кроме того, известное устройство отличается сложностью реализации. Наиболее близким к предлагаемому по технической сущности является самонастраивающийся регулятор для электропривода промышленного механизма, содержащий первый фильтр, сумматор, последовательно соединенные второй фильтр и первый дифференциатор и последовательно соединенные первый элемент сравнения, делитель, умножитель, регулятор, двигатель, третий фильтр и второй дифференциатор, вход которого соединен с пер3-8
вым входом П€ рвого элемента сравнения подключенного вторым входом к входу второго фильтра, а выход умножителя соединен с входом первого фильтра 2
Наличие низкочастотной переменной составляющей в коэффициенте передачи регулятора приводит к повышенной пульсации тока якоря, что ухудшает условия эксплуатации системы и снижает ее быстродействие.
. Цель изобретения - повышение производительности механизма за счет повьштения быстродействия электропривода.
Поставленная цель достигается тем, что привод содержит второй элемент сравнения, первый вход которого соединен с выходом первого дифференциатора второй вход - с выходом второго дифференциатора н вторым входом делителя, а выход через сумматор - со вторым входом умножителя, второй вход сумматора соединен с выходом первого фильтра.
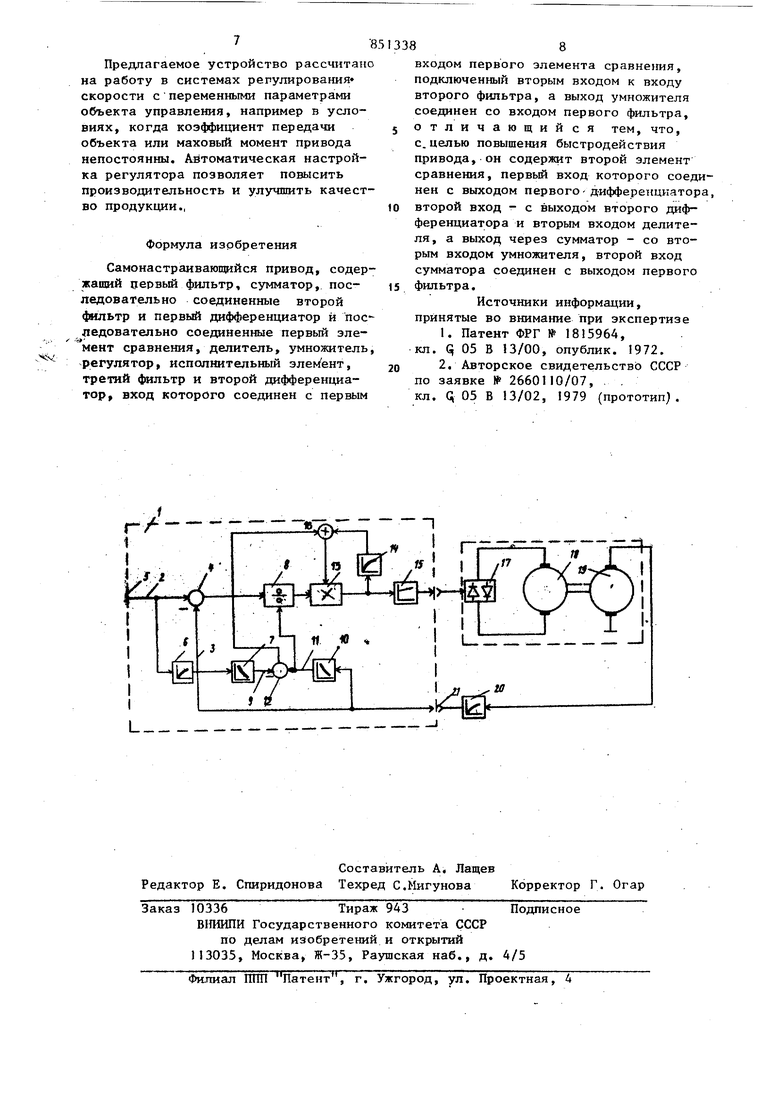
На чертеже представлена блок-схема самонастраивающегося привода.
Привод содержит самонастраивающийся регулятор 1, который включает в себя шины 2 и 3, первый элемент 4 сравнения, вход 5 самонастраивающегося регулятора, второй фильтр 6, первый дифференциатор 7, делитель 8, выход 9 первого дифференциатора, второй дифференциатор 10, выход второго дифференциатора 11, второй элемент 12 сравнения, умножитель 13, первый фильтр 14, регулятор 15 и сумматор 16. Кроме того, привод содержит исполнительный элемент, состоящий из последовательно соединенных исполнительного устройства 17, двигателя 18 и тахогенератора 19, соединенного с входом третьего фильтра 20 скорости, подключенного к выходу 21 самонастраивающегося регулятора 1.
Самонастраивающийся привод работа ет следующим образом.
При подаче на вход регулятора сигнала управления он поступает на вход первого элемента 4 сравнения, и с его выхода - на вход делителя 8. Начальные смещения делителя В и умножителя 13 выбраны так, что коэффициент передачи привода равен единице. Сигнал с выхода умножителя 13 поступает одновременно на вход первого фильтра 14, и регулятора .15. Параметры фильтра 14 выбраны так, что его движение описывается уравнениями, анало3384
гичными дифференциальным уравнениям подсистемы, состоящей из последовательно соединенных испол1штельного устройства 17, двигателя 18, тахоге5 нератора 19, фильтра 20 скорости, и дифференцирующего устройства 10 выходного сигнала. Параметры второго фильтра 6 входного сигнала и первого дифференциатора 7 входного сигнала
0 выбираются так, что сигнал на выходе дифференциатора 7 совпадает по фазе и амплитуде с сигналом с выхода дифференциатора 10. Далее сигнал с выхода регулятора 15 поступает на вход
5 исполнительного элемента и последовательно на вход исполнительного устройства 17. В зависимости от полярности входной сигнал открывает одну из двух групп исполнительного
0 устройства 17. Изменяется ток в
якорной цепи. Двигатель начинает изменять исходную скорость вращения. Информация о скорости снимается с тахогенератора 19 и через третий
5 фильтр 20 поступает одновременно на элемент 4 сравнения и дифференциатор 10. В случае, когда коэффициент передачи объекта равен заданному, за счет равенства сигналов с
0 выхода дифференциаторов 7 и 10 обеспечивается равенство нулю сигнала с выхода элемента 12 сравнения, а следовательно, обеспечивается равенство сигналов с выходов дифференциатора 10 и фильтра 14. При этом коэффициент передачи регулятора, определяемый как отношение этих сигналов, равен единице.
При равенстве сигналов управления на входе самонастраивающегося регулятора 1 и выходе фильтра 20 скорости разгон двигателя 18 прекращается. Система находится в новом установившемся состоянии.
В случае, когда коэффициент передачи объекта отличается от заданного в п раз из-за неравенства коэффициентов передачи подсистемы из элементов 17-20 и 10 и фильтра 14, сигнал с выхода дифференциатора 10
° в п раз- меньше требуемого. При этом коэффициент передачи регулятора определяется из следующего отношения:.
K(t,; z((t,)-2:(t,Hr
сигнал на выходе фильтра 14 в момент t ; 2д сигнал на выходе первого дифференциатора 7 входного сигнала в момент , Z - сигнал на выходе второго дифференциатора 10 выходного сигнала в момент 3 - начальные смещения на элементах 12 сравнения. Пусть в момент t -, на вход привод поступает сигнал управления. Тогда K(t)l, так как он определяется то ко начальными смещениями . Для справедливо K(-fcx+ момента + ±, Увеличение настраиваемого коэффи циента приводит к пропорциональному увеличению сигналов j и z на вы ходах фильтров 14 и 6. Процесс само настройки продолжается до величины К-п , при этом iCt) 1 Данное состоя1гае привода устойчиво, так ка при K(t)vi происходит увеличение сигнала ошибки рассогласования относительно заданной траектории и самонастройка происходит в сторону увеличения коэффициента передачи привода. При K(t)n имеем уменьшение сигнала ошибки рассогласования относительно заданной траектории и самонастройка происходит в сторону умень шения коэффициента передачи привода При скачкообразном изменении нагрузки привод отрабатывает возмущение по моменту статических сопротивлений следующим образом. На выходе дифференциатора 10 появ ляется сигнал 7 (t и поступает одновременно на второй вход делителя 8 непосредственно и через элемент 12 сравнения и сумматор 16 - на второй вход умножителя 13. На выходе элемента 4 сравнения появляется сигнал ошибки рассогласования, который последовательно преобразуется через делитель 8 и умножитель 13 с коэффициентом передачи,равным единице. Сигнал с выхода дифференциатора 9 равен нулю. С выхода умножителя 13 сигнал поступает одновременно на входы фильтра 14 и регулятора 15. Затем преобразуется в регуляторе 15 и поступает на вход одной из групп исполнительного устройства 17. Ток в якорной цепи начинает изме няться с целью компенсировать приложенную к двигателю 18 нагрузку. Информация о скорости двигателя с тахогенератора 19 через фильтр скорости 20 поступает в элемент 4 срав- 86 нения и дифференциатор 10. Одновременно сигнал с выхода фяпьтра 14 приводит к увепиче п1Ю коэф 1«циента передачи регулятора. При этом увеличивается сигнал с выхода регулятора 15. Ток в якорной цепи возрастает. Скорость восстанавливается до заданной. За счет увеличения коэффициента передачи самонастраивакицегося регулятора 1 происходит быстрая компенсация момента по нагрузке и восстановление заданной скорости двигателя 18. При уменьшении сигнала рассогласования с выхода элемента 4 сравнения величина сигнала с выхода умножителя 13 также уменьшается. Последовательно уменьшается сигнал с выхода фильтра 14. В установившемся состоянии Коэффициент передачи самонастраивающегося регулятора 1 равен единице. Система движется с заданной скоростью. Сигнал задания на ток с выхода самонастраивающегося регулятора 1 пропорционален новой величине нагрузки на двигатель 18. Быстродействие контура регулирования определяется уровнем и частотой переменной составляющей в сигнале скорости. В предлагаемом регуляторе низкочастотная переменная составляющая в полезном сигнале обратной связи по скорости не влияет на коэффициент передачи регулятора. С выхода дифференциатора 10 выходного сигнала низкочастотная переменная составляющая поступает на второй вход делителя 8 и одновременно через элемент 12 сравнения и сумматор 16 на второй вход умножителя 13. Таким образом, в установившемся режиме коэффициент передачи регулятора равен единице и не содержит низкочастотной составляющей . Технико-экономические расчеты показывают, что модернизация электропривода одного копировально-фрезерного станка позволяет увеличить производительность станка более,чем на 15%, что дает годовой экономический эффект около 9,3 тыс.руб. на один станок. Техникб-экономический эффект от внедрения предлагаемого изобретения обусловлен улучшением технологических режимов и повьшгением производительности оборудования в результате повьшгения быстродействия системы электропривода.
Предлагаемое устройство рассчитано на работу в системах регулирования скорости с переменными параметрами объекта управления, например в условиях, когда коэффициент передачи объекта или маховый момент привода непостоянны. Автоматическая настройка регулятора позволяет повысить производительность и улучшить качество продукции.,
Формула изобретения
Самонастраивающийся привод, содержаошй первый фильтр, сумматор, последовательно соединенные второй фильтр и первый дифференциатор и пос ледовательно соединенные первый эле мент сравнения, делитель, умножитель,
iVрегулятор, исполнительный элемент, третий фильтр и второй дифференциатор, вход которого соединен с первым г/-входом первого элемента сравнения, подключенный вторым входом к входу второго фильтра, а выход умножителя соединен со входом первого фильтра,
отличающийся тем, что, с.целью повышения быстродействия привода, он содержит второй элемент сравнения, первый вход которого соединен с выходом первого-дифференциатора,
второй вход - с выходом второго дифференциатора и вторым входом делителя, а выход через сумматор - со вторым входом умножителя, второй вход сумматора соединен с выходом первого
фильтра.
Источники информации, принятые во внимание при экспертизе
