1
Изобретение может быть использовано в системах автоматического регулирования (САР), в которых требуется поддержание повышенной точности наведения при действии .внешнего возмущающего момента произвольного вида, приложенного к объекту регулирования.
Известны следящие системы, содержащие объект регулирования, измеритель угла рассогласования, выход которого через последовательно соединенные сумматор и усилитель подключен по входу исполвительного двигателя постоянного тока, и блок дифференциаторов, выход которого связан со 1входом сумматора.
Для ком1пенсации ошибки от действия внешнего возмущающего момента на вход блока дифференциаторов поступает сигнал, пропорциональный току якоря исполнительного двигателя, и сигнал тахогенератора постоянного тока, пропущенный через дифференцирующий контур с передаточной функцией
й.
Р
Известная следящая система не .может обеспечить достаточно точной компенсации ошибки при действии широкого спектра амплитуд и частот возмущающих воздействий, поскольку ток якоря исполнительного двигателя пропорционален его моменту в малом диапазоне амплитуды тока (до 1,5/ы, -где /н - номинальный ток исполнительного двигателя), а сигнал коллекторных пульсаций на выходе блока |Диффе1ре.Н1Циаторов при малой постоянной времени т дифференцирук щего звена (что нужно для уменьшения погрешности дифференцирования) оказывается недопустимо большим, что может привести к уменьшению точности слежения и даже потере управляемости
следящей системы.
Предложенная следящая система отличается от известной тем, что она содержит датчик крутящего момента, включенный между валом исполнительного двигателя и валом объекта
регулирования, датчик угловых ускорений, расположенный на валу исполнительного двигателя, и два блока преобразования. Причем выход датчика крутящего момента через первый блок преобразования, а выход датчика
угловых ускорений через второй |блок преобразования по 1;ключены ко входам блока дифференциаторов.
Введение в следящую систему датчика крутящего .момента, имеющего линейную выходную характеристику в больщом диапазоне а.милитуд крутящих моментов, и датчика угловых ускорений, дающего достаточно «чистый сигнал, пропорциональный ускорению исполнительного двигателя, позволяет повысить точность слежения системы при действии
широкого спектра амплитуд .и частот возмущающего воздействия.
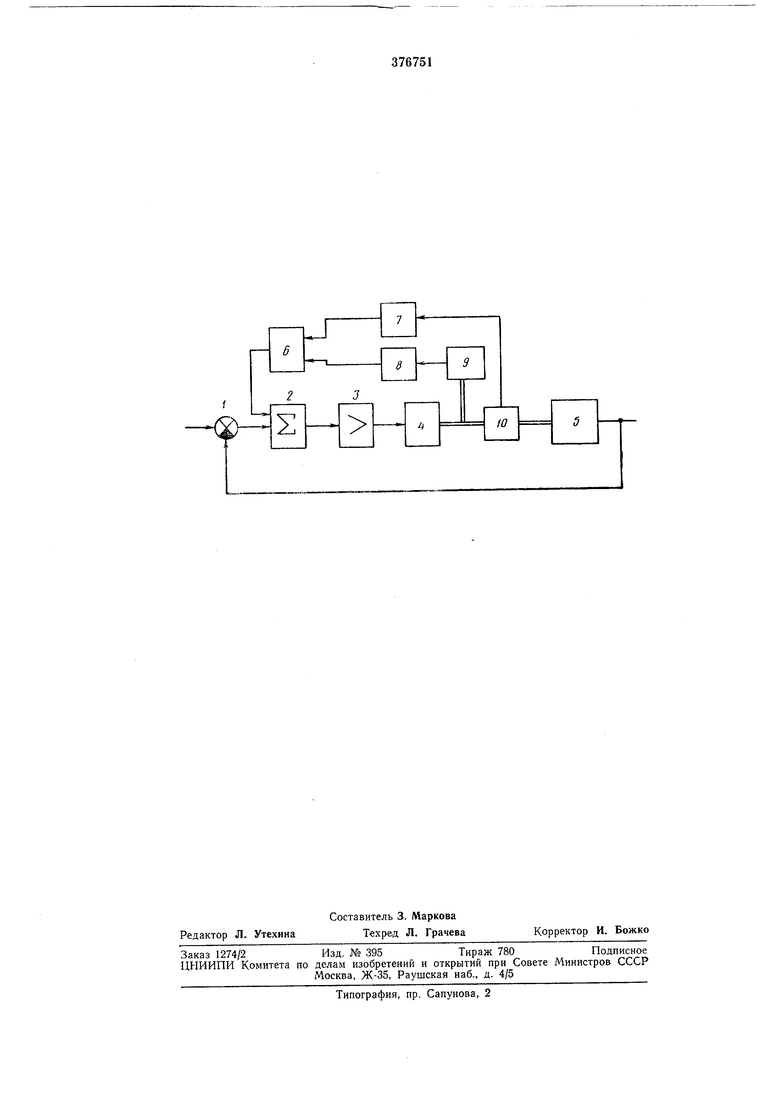
Блок-схема следящей системы изображена на чертеже.
Она содержит измеритель угла рассогласования /, сумматор 2, усилитель 3, исполнительный двигатель 4, объект регулирования 5, блок дифференциаторов 6, первый блок преобразования 7, второй блок преобразования 8, датчик угловых ускорений (ДУУ) 5 и датчик крутящего момента (ДКМ) 10.
Следящая система работает следующим образом.
СИГнал ощибки с измерителя угла рассогласования I .поступает на один из входов сумматора 2, на другой вход которого поступает компенсирующий ситнал с блока дифференциаторов б. Выходной сигнал сумматора усиливается усил1ителем 3 и поступает на якорные клеммы двигателя 4. При этом вал двигателя 4, вращаясь, приводит через датчик крутящего момента 10 в движение объект регулирования, сводя сигнал рассогласования к минимуму.
ДКМ непрерывно измеряет момент, передаваемый двигателем 4 объекту регулирования. Выходной сигнал ДКМ можно представить в виде
:/дкм л:1( + М8н),
где t/дкм - выходной сигнал ДКМ;
К. -коэффициент пропорциональности;
/о -момент инерции объекта регулирования, 1приведенный к валу исполнительного двигателя; -внешний момент, приложенный к объекту регулирования и приведенный к валу исполнительного двигателя; е - уокорен-ие вала исполнительного
двигателя.
ДУУ непрерывно замеряет ускорение вала исполнительного двигателя. Его выходной сигнал бдуу равен
7дуу АГ2-8,
где /(о - коэффидиент яропорщиональности.
Выходные сигналы ДКМ и ДУУ обрабатываются соответствующими блоками преобразования 7 и S, предназначенными для преобразования сигналов переменного тока в сигналы постоянного тока, сглаживания пульсаций переменного тока, Компенсации, в случае необходимости, зашаздываний, имеющихся у некоторых видов ДКМ и ДУУ, придания сигналам о1боих датчиков близких частотных характеристик, и поступают в тротивофазе на входы блока дифференциаторов 6. Если при этом справедливо соотиощение
KJo К,,
то разность выходных сигналов ДКМ и ДУУ (At/) есть сигнал, пропорциональный внешнему возмущающему моменту Жвп.
Ш t/дкм - ицуу /С,. /о е + /С. - К, (/С,/о - /С,) S + м;„ /С.Мвн. Этот сигнал, (Пропорциональный внешнему возмущающему воздействию, обрабатывается блокам дифференциаторов и поступает как компенсирующий сигнал на второй вход сумматора 2. Передаточная функция блока дифференциаторов выбирается согласно теории компенсации возмущений (теория инвариантности).
Устойч-ивость следящей системы обеспечивается соответствук Щ1Ими кодректирук щ«ми устройствами (на чертеже не показаны).
Предмет изобретения
Следящая система, содержащая объект регулирования, измеритель- угла рассогласования, выход которого через последовательно
соединенные сумматор и усилитель подключен ко входу ис-полнительного двитателй, и блок дифференциаторов, выход которого связан со входом сумматора, отличающаяся тем, что, с целью повыщёния точности слежения при действии внешнего возмущающего момента произвольного вида, приложенного « объекту регулирования, система содержит датчик крутящего момента, включенный между валом исполнительного двигателя и валом объекта,
датчик угловых ускорений, установленный на валу исполнительного двигателя, и два 1блока преобразования; причем выход датчика крутящего момента через первый блок преобразования, а выход датчика угловых ускорений
через второй блок преобразования подключены «о входам блока дифференциаторо-в.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1980 |
|
SU885970A1 |
| Следящая система с компенсацией лифта механической передачи | 1976 |
|
SU620940A1 |
| Следящий привод с коррекцией люфта в механической передаче | 1976 |
|
SU647646A1 |
| СЛЕДЯЩИЙ ПРИВОД | 1972 |
|
SU434374A1 |
| Следящая система для управления гелиостатом | 1981 |
|
SU964575A1 |
| Устройство для определения координат упругого объекта в автоматизированном электроприводе | 1985 |
|
SU1327057A1 |
| Двухканальная система управления телескопом | 1983 |
|
SU1171752A1 |
| СЛЕДЯЩИЙ ПРИВОД | 2007 |
|
RU2361258C1 |
| Устройство для преобразования угла поворота вала в код | 1974 |
|
SU610148A1 |
| Следящий привод | 2019 |
|
RU2723331C1 |