Изобретение относится к области телеизмерений и может быть использовано в системах записи информации на движущемся носителе, работающих в условиях воздействия ударных перегрузок.
Известные лентопротяжные механизмы, содержащие ведущий вал с прижимным роликом и два параллельных ряда направляющих роликов, не обеспечивают равномерности движения магнитной ленты при воздействии быстропеременных ускорений и ударных нагрузок. Приходится заведомо увеличивать номинальную скорость носителя, что приводит к уменьшению продольной записи и к увеличению объема носителя при заданном объеме информации. Причем увеличение номинальной скорости носителя при прочих равных условиях тем больше, чем больще амплитуда действующего ускорения.
Целью изобретения является увеличение равномерности движения магнитной ленты при воздействии на лентопротяжный механизм ориентированных и неориентированных ударных перегрузок.
Для этого между параллельными рядами направляющих роликов размещена подпружиненная демпфированная каретка, с противоположных концов которой установлены два параллельных ряда дополнительных направляющих роликов, выполненных, перемещак -.
щимися между роликами упомянутых рядов при движении каретки. Для увеличения равномерности двилсения магнитной ленты при воздействии неориентированных ударных перегрузок упомянутая каретка связана с щестью кинематически соединенными муфтами, каждая из которых через тросик связана с одним из шести подпружиненных цилиндров, перемещающихся в одном нз трех взаимноперпендикулярных направлений.
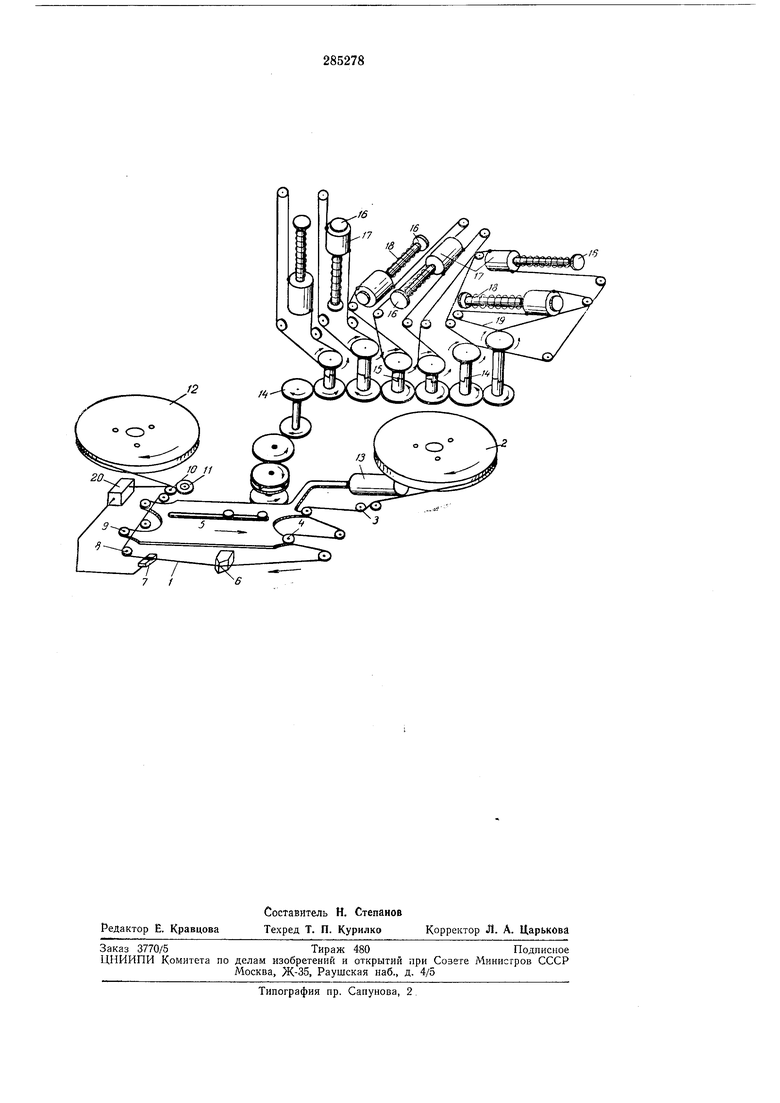
На чертеже приведена кинематическая схема предлагаемого лентопротяжного механизма.
Носитель / с подающей кассеты 2 поочередпо проходит через направляющие ролики 3 и дополнительные направляющие ролики 4 подвижной каретки 5, образуя запас ленты, затем через блок 6 магнитных головок, датчик /скорости носителя /, между направляющими роликами 8 и дополнительными направляющими роликами 9 подвижной каретки 5 и через ведущий вал 10 с прижимным роликом // попадает на приемную кассету 12. Подвижная каретка 5 связана с демпфером 13 и через кинематический узел 14 и муфты 15 с помощью троссиков - с системой инерционных масс, выполненой в виде трех пар взаимно перпендикулярных направляющих 16 с подвижными цилиндрами 17, прул ;инами 18 и щкивами 19. рости носителя применен блок 20 системы автоматического регулирования, связанный с датчиком 7 скорости. При воздействии достаточно большого ускорения любого направления часть подвижных цилиндров 17 передвинется по направляющим 16 и через шкивы 19 и муфты 15 приведет в движение входной вал кинематического узла 14, причем его угол поворота определяется максимальным перемещением одного из подвижных цилиндров 17, которое зависит от направления ускорения и может отличаться примерно в два раза. Далее с помощью кинематического узла 14, вращение его входного вала передается на подвижную каретку 5, которая начинает перемещаться в крайнее (на чертеже- правое) положение. Дополнительные направляющие ролики 9, проходя между направляющими роликами 8, принимают запас носителя, который оказался свободным в результате перемещения дополнительных направляющих роликов 4 относительно направляющих роликов 3. При вибрации изменение фазы действующего ускорения на 180° вызывает перемещение другой части подвижных цилиндров 17, а первая часть под действием ускорения и пружин 18 возвращается в исходное положение. Холостой ход цилиндров смягчается демпферами, установленными на концаю направляющих 16. После удара подвижные цилиндры 17 под действием пружин 18 возвращаются в исходное положение, подвижная каретка также подпружинена, но ее обратный ход замедлен демпфером /5. Это позволяет регулировать скорость носителя / при возвращении каретки 5 в исходное положение с помощью датчика 7 скорости и блока 20 системы автоматического регулирования. Время возвращения каретки 5 в исходное положение определяет предельную рабочую частоту- коррекции действия ускорений. В некоторых случаях, например при инерционности лентопротяжного механизма ниже определенного предела или при записи информации на магнитный диск или барабан, когда нельзя создать запас носителя, целесообразно движение подвижных цилиндров 17 через кинематический узел 14 и муфты 15 передавать непосредственно на ведущий вал 10 и приемную 12 и подающую 2 кассеты. Это упрощает устройство за счет исключения направляющих роликов 3 н 8, подвижной каретки 5 с дополнительными направляющими роликами 4 VL 9, демпфера 13, датчика 7 скорости и блока 20 системы автоматического регулирования. Если уменьшение скорости носителя под воздействием ударного ускорения является случайной величиной, то приращение скорости должно быть максимально возможным и не зависящим от величины ударного ускорения. Если направление удара заранее известно, то система инерционных масс может быть упразднена, а функция подвижных цилиндров выполнена определенно расположенной подвижной кареткой. Если же в момент обратного хода каретки скорость носителя не регулируется блоком 20, то продольная плотность записи уменьшается, тем больше, чем меньше время обратного хода каретки, регулируемое демпфером. Предлагаемое устройство позволяет регулировать быстрые уменьшения скорости носителя при ударах, вибрациях и прочих равных условиях, исключать наложение отпечатков при записи информации и может быть применено не только для перемещения магнитоносителя, но и других типов ленточных носителей, например, киноленты. Предмет изобретения 1. Лентопротяжный механизм, содержащий ведущий вал с прижимным роликом и два параллельных ряда направляющих роликов, отличающийся тем, что, с целью увеличения равномерности движения магнитной ленты при воздействии ориентированных ударных нагрузок, между параллельными рядами направляющих роликов размещена подпружиненная демпфированная каретка, с противоположных концов которой установлены два параллельных ряда дополнительных направляющих роликов, выполненных перемещающимися между роликами упомянутых рядов при движении каретки. 2. Механизм по п. 1, отличающийся тем, что, с целью увеличения равномерности движения магнитной ленты при воздействии неориентированных ударных нагрузок, упомянутая каретка связана с шестью кинематически соединенными муфтами, каждая из которых через тросик связана с одним из шести подпружиненных цилиндров, перемещающихся в одном из трех взаимно перпендикулярных направлений.
| название | год | авторы | номер документа |
|---|---|---|---|
| Лентопротяжный механизм | 1982 |
|
SU1287226A1 |
| Кассетное устройство для магнитной записи - воспроизведения информации | 1989 |
|
SU1727168A1 |
| Записывающее и/или воспроизводящее устройство для ленточного носителя информации | 1989 |
|
SU1838832A3 |
| Лентопротяжный механизм для нескольких кассет | 1976 |
|
SU614463A2 |
| Многокассетный лентопротяжный механизм | 1983 |
|
SU1084881A1 |
| Лентопротяжный механизм | 1984 |
|
SU1332373A1 |
| Лентопротяжный механизм | 1976 |
|
SU599282A1 |
| Лентопротяжный механизм | 1988 |
|
SU1607005A1 |
| Лентопротяжный механизм | 1960 |
|
SU145364A1 |
| БЕСТОРМОЗНОЙ ЛЕНТОПРОТЯЖНЫЙ МЕХАНИЗМ | 1970 |
|
SU274412A1 |