Известны устройства контроля положения струга в лаве, с использованием которых можно производить выборку искривленного участка лавы в заданных пределах.
Предложенное устройство отличается от известных тем, что выходы датчиков контроля прямолинейности подключаются поочередно к пороговым схемам, одна из которых через дпфференцируюш:ую цепочку подсоединена ко входу схемы «И, включаюш.ей автоматический режим, и через другую схему «И, управляющую реверсированием, воздействует на триггер реверсирования, управляемый также концевыми выключателями, а вторая подсоединена к одному из входов другого триггера, выход которого подключен ко второму входу схемы «И, включающей автоматический режим, причем второй вход указанного триггера управляется выключателями на концах лавы. Это повышает машинное время работы струга в лаве.
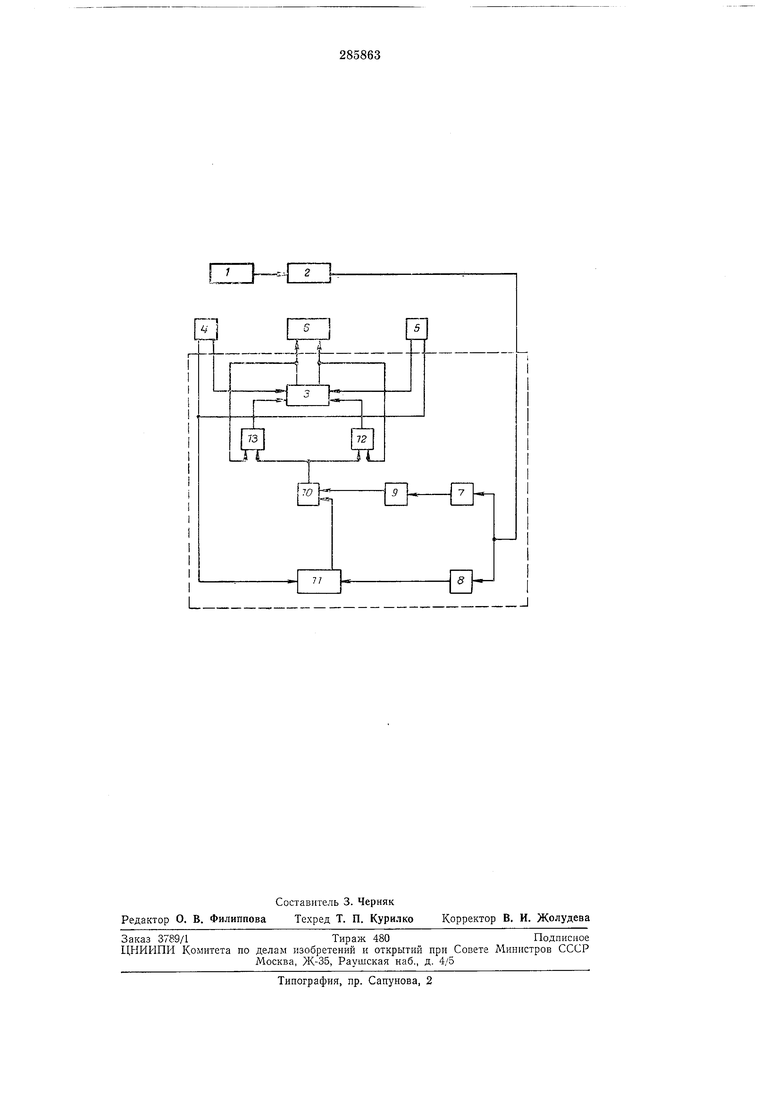
При поступлении на вход устройства разрешающих импульсов от датчика контроля местоположения струга в лаве 1 на выходе датчиков прямолипейности 2 появляются сигналы, пропорциональные стреле прогиба в точках установки этих датчиков.
поочередно подаются сигналы на реверсирование с концевых выключателей 4 и 5, и управляемый этим триггером блок 6 осуществляет реверсирование струга. При искривлении лавы с выхода датчика 2 на вход пороговых устройств 7 и S поступает сигнал, пропорциональный искривлению в контролируемой точке. Уровень сигнала, необходимый для срабатывания устройства 7, меньше, чем для срабатывания порогового устройства 8.
По мере вхождения струга в зону искривленного участка уровень сигнала на выходе датчика 2 увеличивается и при достижении меньн1его порога включается пороговое устройство 7. При выходе струга из зоны нскривления уровень сигнала уменьшается, устройство 7 выключается и на выходе дифференцирующего устройства 9 от заднего фронта сигнала появится импульс управления реверсом, поступающий на один из входов логической схемы «П 10, выполняющей функцию включенггя автоматического режима. Однако этот импульс через схему 10 не проходит ввиду отсутствия разрешающего сигнала на втором входе этой
схемы, и релчим работы струга не изменяется. Если искривление достигнет предельно-допустимой величины, то при прохождении стругом экстремального участка на выходе датчика 2 сигнал достигнет величины боотьшего пороговое устройство 8, которое в свою очередь включает блок автоматического режима, представляющий собой триггер 11 с двумя независимыми входами. После включения триггера
11струг начнет работать в режиме автоматической выемки, так как на второй вход схемы 10 в этом случае будет подан разрешающий сигнал. В момент выхода струга из зоны искривления импульс реверсирования через схему 10 поступит на входы логических схем «И
12и 13, которые выполняют функцию управления реверсированием. Открытое состояние этих логических схем определяется состоянием блока 6 реверсирования или направлением движения струга. Если, например, в автоматическом режиме, до нрихода импульса управления реверсированием струг движется слева направо и при этом с блока 6 подается сигнал подготовки на первый вход логической схемы 13, то прищедщий сигнал реверсирования с выхода схемы 10 проходит только через схему 13 и измеряет состояние триггера 3 реверсирования. Это изменяет состояние блока 6, а следовательно, изменяется направление движения струга; он двигается сирава налево. При этом, сигнал подготовки поступает на вход логической схемы 12, а с первого входа схемы 13 снимается. Следующий сигнал реверсирования, который сформулируется в момент нодхода струга к другому конпу искривленного участка, с выхода схемы 10 теперь уже через логическую схему 12 поступит на второй разделенный вход триггера 3 и направление движения струга вновь изменится.
Цикличная .работа стру(га в автоматическом режиме происходит до выпрямления искривленного участка лавы. При этом, но мере уко.рачивания участка, расстояние между точками ф ормирования импульсов реверсирования будет уменьшаться и величина минимального хода струга оиределится расстоянием между точками установки двух соседних датчиков прямолинейности. При вынрямлении участка лавы сигнал с выхода датчиков 2 снижается
до величииы, меньшей порогового значения. Паправлепие движения струга после процесса выравнивания забоя определяется местом последиего реверсировання.
Автоматический режим остается включенным по всему пути струга к любому краю лавы. При встрече струга с другим искривлепным участком также будет сформирован сигпал реверсирования, и процесс выравнивания повторится.
Выключение автоматического режима произойдет при срабатывании одного из коицевых выключателей. В этом случае сигнал реверсирования с концевого выключателя 4 или 5 поступает на второй вход триггера 11.
Дальнейшая работа струга происходпт в челночном режиме между концевыми выключателями. При новом искривлении лавы вновь включится режим автоматического выравнивания.
Предмет изобретения
Устройство для выравнивания забоя струговой лавы, состоящее из датчиков контроля местоположения струга в лаве и прямолинейности, логических и пороговых схем, выллючателей на концах лавы, отличающееся тем, что, с целью товыщения мащиеного времени, выходы датчиков .контроля лрямолинейности подключаются ноочередню к пороговым схемам, одна из которых через дифференцирующую цепочку подсоединена «о входу схемы «И, включающей автоматический
режим, и через другую схему «И, управляющую ревер1сированием, воздействует на триггер реверсирования, }.пра1вляемый также концевыми выключателями, а вторая подсоединена к одному из входов другого триггера,
выход которого подключен ко второму входу схемы «И, включающей автоматический режим, причем второй вход указанного триггера управляется выключателями на концах ла.вы.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ВЫРАВНИВАНИЯ ЗАБОЯ СТРУГОВОЙ ЛАВЫ | 1972 |
|
SU428362A1 |
| Устройство автоматического поддержания прямолинейности базы очистного агрегата | 1981 |
|
SU1010284A1 |
| Система автоматического управления струговой установкой | 1977 |
|
SU1002602A1 |
| Способ дискретного контроля местонахождения в лаве исполнительного органа струга и устройство для его осуществления | 1986 |
|
SU1382949A1 |
| Устройство автоматического управления системой пылеподавления струговой установки | 1982 |
|
SU1092281A1 |
| Устройство автоматического управления выдвижкой секций базы угледобывающего агрегата | 1983 |
|
SU1120111A1 |
| Устройство автоматического поддержания прямолинейности секций базы угледобывающего агрегата | 1980 |
|
SU935628A2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СТРУГОВЫМ АГРЕГАТОМ ДЛЯ ЛАВЫ С КРЕПЕЖНЫМИ СТОЙКАМИ | 1991 |
|
RU2069270C1 |
| БИОЭЛЕКТРИЧЕСКИЙ ОРТОПЕДИЧЕСКИЙ АППАРАТ НА ВЕРХНЮЮ КОНЕЧНОСТЬ | 1973 |
|
SU384520A1 |
| Устройство для управления магнитофоном | 1986 |
|
SU1332372A1 |