i Изобретение относится к горной промышленности, а именно к автоматизации горных машин, и может быть использовано для автоматизации струго- Ьых установок.
Целью изобретения является повышение достоверности контроля путем учета габаритов исполнительного органа струга.
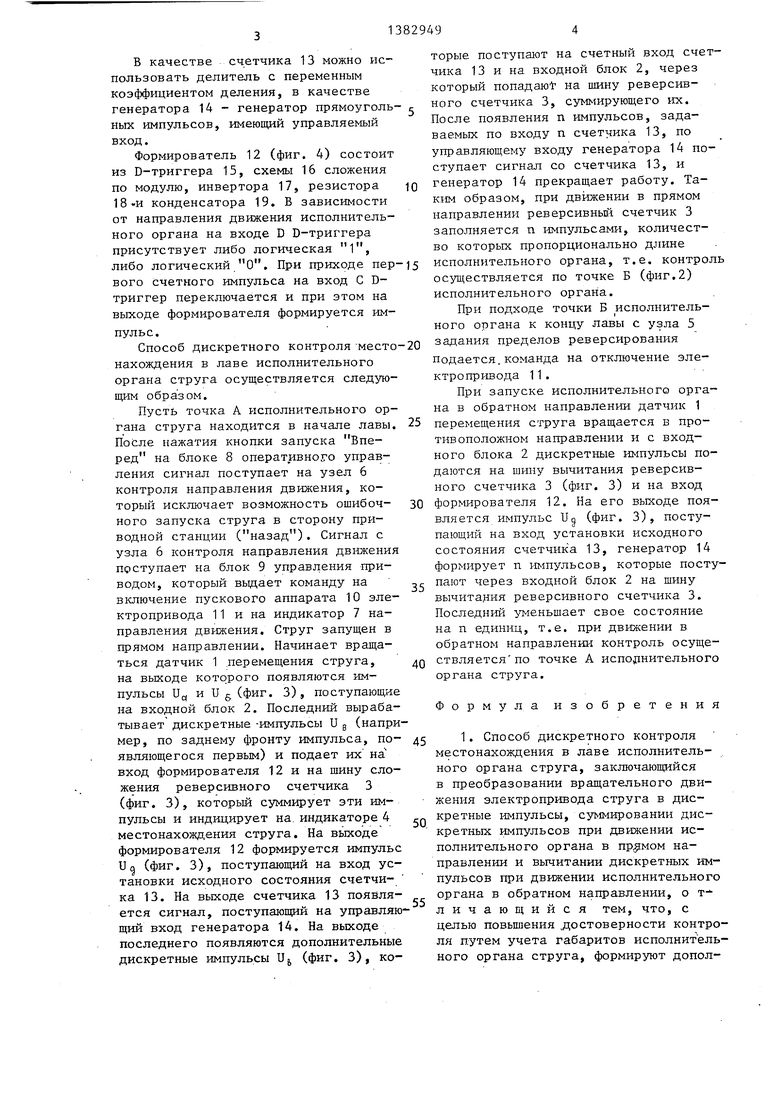
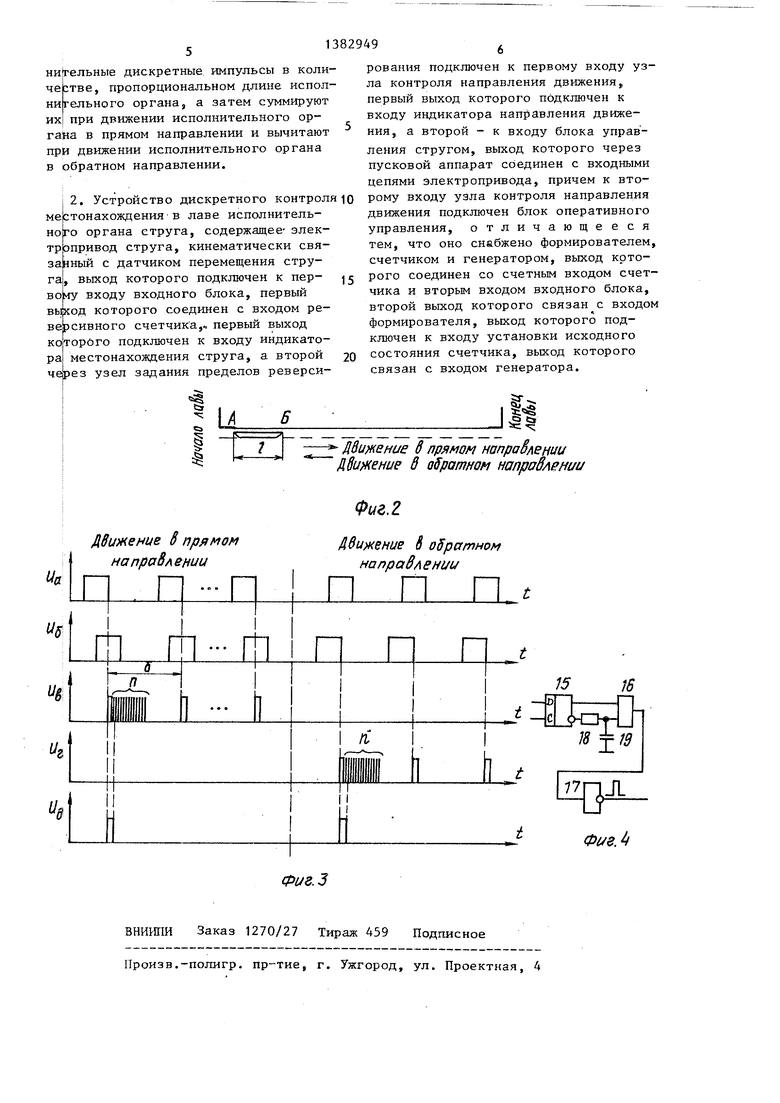
На фиг. 1 приведена схема устройства, реализующего способ; на фиг.2 схематично лава и исполнительный орган струга; на фиг. 3 - временные диаграммы, поясняющие способ; на фиг. 4 - структурная схема формирователя.
При движении исполнительного органа в прямом направлении после прихода каждого дискретного импульса показания индикатора местонахождения струга увеличиваются на единицу При начале движения в прямом направлении формируют п дополнительных дискретных импульсов, которые увеличи- 1вают показания индикатора местона- Iхождения струга на п единиц. Коли- 1 честно дополнительных дискретных импульсов определяют из соотношения
где 1 - длина исполнительного органа струга;
« - расстояние, пройденное исполнительным органом струга за длительность времени между двумя соседними дискретными импульсами5 характеризующие точность контроля, а затем округляют до целого числа.
При движении в обратном направлеНИИ после прихода каждого дискретного импульса показания индикатора местонахождения струга уменьшаются на единицу. При начале движения в обратном направлении формируют п дополнительных дискретных импульсов которые уменьшают показания индикатора местонахождения струга на п еди- .ниц.
Таким образом, при движении исполнительного органа струга в прямом направлении контроль осуществляют по точке Б (фиг. 2) исполнительного органа струга, а при движении в обратном направлении - по точке А исполнительного органа струга, т.е. контроль осуществляют по той же
0
5
0
5
0
5
0
5
0
5
точке исполнительного органа струга, которая при движении исполнительного органа в лаве первой достигает границ лавы.
Устройство (фиг. 1), реализующее способ, содержит датчик 1 перемещения струга, входной блок 2, реверсивный счетчик 3, индикатор 4 местонахождения струга, узел 5 задания пределов реверсирования, узел 6 контроля направления движения, индикатор 7 направления движения блок 8 оперативного управления, блок 9 управления приводом, пусковой аппарат 10, электропривод 11, формирователь 12, счетчик 13 и генератор 14. Датчик 1 перемещения струга ки нематически связан с электроприводом 11.
Датчик 1 перемещения струга соединен через входной блок 2 с реверсивным счетчиком 3, к выходам которого подключены индикатор 4 местонахождения струга и узел 5 задания пределов реверсирования, выход которого соединен с узлом 6 контроля направления движения, который под- ключен к индикатору 7 направления двияшния и блоку 8 оперативного управления, а через блок 9 управления приводом и пусковой аппарат 10 - к электроприводу 11, управляюящй вход генератора 14 подключен к выходу счетчика 13, а выход соединен с входным блоком 2 и счетным входом счетчика 13, вход установки исходного состояния которого соединен с выходом формирователя 12, вход которого дод- ключен к выходу входного блока 2
Датчик 1 перемещения струга представляет собой два геркона, около которых вращается магнит, входной блок 2 - входное устройство ВУ, реверсивный счетчик 3 - счетчик,, вы- полненньй на триггерах Тг1-Тг25, индикатор 4 местонахождения струга - блок БИ, узел 5 задания пределов реверсирования - переключатели В1- В6 и блок УВП, узел 6 контроля направления движения - реле Р1, РЗ блока БУП, индикатор 7 направления движения - индикаторы И5, И6 блока БУП, блок 8 оперативного управления - кнопки пуска и останова струга 1-КнБ, 1-КнН, 1-КнС, блок 9 управления приводом - блоки БУП и УДУ.
Пусковой аппарат 10 представляет собой пускатель.
В качестве счетчика 13 можно использовать делитель с переменным коэффициентом деления, в качестве генератора 14 - генератор прямоуголь ных импульсов, имеющий управляемый вход.
Формирователь 12 (фиг. 4) состоит из D-триггера 15, схемы 16 сложения по модулю, инвертора 17, резистора 18-и конденсатора 19. В зависимости от направления движения исполнительного органа на входе D D-триггера присутствует либо логическая 1, либо логический О, При приходе пер вого счетного импульса на вход С D- триггер переключается и при этом на выходе формирователя формируется импульс.
Способ дискретного контроля место нахождения в лаве исполнительного органа струга осуществляется следующим образом.
Пусть точка А исполнительного органа струга находится в начале лавы. После нажатия кнопки запуска Вперед на блоке 8 оперативного управления сигнал поступает на узел 6 контроля направления движения, который исключает возможность ошибочного запуска струга в сторону приводной станции (назад). Сигнал с узла 6 контроля направления движения поступает на блок 9 управления приводом, который вьщает команду на включение пускового аппарата 10 электропривода 11 и на индикатор 7 направления движения. Струг запущен в прямом направлении. Начинает вращаться датчик 1 .перемещения струга, на выходе которого появляются импульсы Uq и и (фиг. 3), поступающие на входной блок 2. Последний вырабатывает дискретные -импульсы U g (например, по заднему фронту импульса, по- являющегося первым) и подает их на вход формирователя 12 и на шину сложения реверсивного счетчика 3 (фиг. 3), который суммирует эти импульсы и индицирует на индикаторе 4 местонахожд,ения струга. На выходе формирователя 12 формируется импульс и о (фиг. 3), поступающий на вход установки исходного состояния счетчи- ка 13. На выходе счетчика 13 появляется сигнал, поступающий на управляющий вход генератора 14. На выходе последнего появляются дополнительные дискретные импульсы U (фиг. 3), ко
0
5
с
5
0
дз
0
35
40
0.
5
торые поступают на счетный вход счетчика 13 и на входной блок 2, через который попадаю на шину реверсивного счетчика 3, суммирующего их. После появления п импульсов, задаваемых по входу п счетчика 13, по управляющему входу генератора 14 поступает сигнал со счетчика 13, и генератор 14 прекращает работу. Таким образом, при движении в прямом направлении реверсивньй счетчик 3 заполняется п импульсами, количество которых пропорционально длине исполнительного органа, т.е. контроль осуществляется по точке Б (фиг.2) исполнительного органа.
При подходе точки Б исполнительного органа к концу лавы с узла 5 задания пределов реверсирования Подается.команда на отключение электропривода 11.
При запуске исполнительного органа в обратном направлении датчик 1 перемещения струга вращается в противоположном направлении и с входного блока 2 дискретные импульсы подаются на шину вычитания реверсивного счетчика 3 (фиг. 3) и на вход формирователя 12. На его выходе появляется импульс UQ (фиг. 3), ПОСТу- пающий на вход установки исходного состояния счетчика 13, генератор 14 формирует п импульсов, которые поступают через входной блок 2 на шину вычитания реверсивного счетчика 3. Последний з меньшает свое состояние на п единиц, т.е. при движении в обратном направлении контроль осуществляется по точке А исполнительного органа струга.
Формула изобретения
1. Способ дискретного контроля местонахождения в лаве исполнительного органа струга, заключающийся в преобразовании вращательного движения электропривода струга в дискретные импульсы, суммировании дискретных импульсов при движении исполнительного органа в пр.рмом направлении и вычитании дискретных импульсов при движении исполнительного органа в обратном направлении, о т- личающийся тем, что, с целью повышения достоверности контроля путем учета габаритов исполнительного органа струга, формируют дополни|гельные дискретные импульсы в количестве, пропорциональном длине исполнительного органа, а затем суммируют их при движении исполнительного органа в прямом направлении и вычитают при движении исполнительного органа в обратном направлении.
I 2. Устройство дискретного контрол местонахождения в лаве исполнительного органа струга, содержащее- электропривод струга, кинематически связанный с датчиком перемещения струга, выход которого подключен к пер- воиу входу входного блока, первый вьЕход которого соединен с входом реверсивного счетчика,, первый выход которого подключен к входу индикатора местонахождения струга, а второй узел задания пределов реверси
рования подключен к первому входу узла контроля направления движения, первый выход которого подключен к входу индикатора направления движения, а второй - к входу блока управления стругом, выход которого через пусковой аппарат соединен с входными цепями электропривода, причем к второму входу узла контроля направления движения подключен блок оперативного управления, отличающееся тем, что оно снабжено формирователем счетчиком и генератором, выход которого соединен со счетным входом счетчика и вторым входом входного блока, второй выход которого связан с входо формирователя, выход которого подключен к входу установки исходного состояния счетчика, выход которого связан с входом генератора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство контроля местонахождения струга и управления приводом струговой установки | 1979 |
|
SU899920A1 |
| Устройство автоматического управления системой пылеподавления струговой установки | 1982 |
|
SU1092281A1 |
| Система автоматического управления струговой установкой | 1977 |
|
SU1002602A1 |
| Устройство для индикации работы транспортно-закладочной установки | 1980 |
|
SU909164A1 |
| Устройство для контроля местонахождения струга в лаве | 1979 |
|
SU883408A1 |
| УСТРОЙСТВО КОНТРОЛЯ МЕСТОНАХОЖДЕНИЯ СТРУГАВ ЛАВЕ | 1972 |
|
SU357344A1 |
| Устройство контроля местонахождения струга в лаве | 1975 |
|
SU583297A1 |
| Устройство контроля местонахождения рабочего органа выемочной машины | 1977 |
|
SU691561A1 |
| СИСТЕМА ТЕЛЕМЕХАНИКИ ДЛЯ ОБЪЕКТОВ С ИНЕРЦИОННЫМИ ИСПОЛНИТЕЛЬНЫМИ МЕХАНИЗМАМИ | 1973 |
|
SU393762A1 |
| Способ диагностирования предельных искривлений конвейерного става струговой установки в плоскости пласта | 1983 |
|
SU1348513A1 |
Изобретение относится к горной промышленности и предназначено для автоматизации горных машин. Цель изобретения - повьшение достоверности контроля путем учета габаритов исполнительного органа струга. Пре образО1зывают вращательное движение электропривода струга в дискретные импульсы. Суммируют дискретные импульсы при движении исполнительного органа в прямом направлении. Вычитают дискретные импульсы при движении исполнительного органа в обратном направлении. Формируют дополнительные дискретные импульсы в количестве, пропорциональном длине исполнительного органа. Затем суммируют их при движении исполнительного органа в прямом направлении и вычитают при движении органа в обратном напра вле- нии. Устройство ,, для реализации способа содержит датчик 1 перемещения струга, входной блок 2, реверсивный счетчик 3, индикатор 4 местонахождения струга, узел 5 задания пределов реверсирования, узел 6 контроля направления двгшения, индикатор 7 направления, движения, блок 8 оперативного управления, блок 9 управления приводом, пусковой аппарат 10, электропривод 11, формирователь 12, счетчик 13 и генератор 14. 2 с.п, ф-лы, 4 ил. SS СО х: 14:; «Г
1
«t
- Движение в прямом направлении движение 8 обратном напраВлении
Фиг.2
/1ви)кени5 8 обратном направлении
1
«t
| Голубчиков A.M | |||
| и др | |||
| Аппаратура автоматизации струговых установок | |||
| Обзор ЦНИЭИуголь | |||
| Вып | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство контроля местонахождения струга и управления приводом струговой установки | 1979 |
|
SU899920A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
