сл
С
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перевода стрелы крана в транспортное положение | 1990 |
|
SU1791344A1 |
| Устройство для поддержания постоянной высоты подъема грузозахватного органа стрелового крана при изменении вылета стрелы | 1988 |
|
SU1523530A1 |
| Устройство для управления приводами грузовых лебедок стрелового крана | 1986 |
|
SU1407896A1 |
| Устройство для поддержания высотыпОд'ЕМА гРузОзАХВАТНОгО ОРгАНА СТРЕлОВОгОКРАНА пРи изМЕНЕНии ВылЕТА СТРЕлы | 1978 |
|
SU800111A1 |
| Указатель длины грузового каната стрелового крана | 1989 |
|
SU1671602A1 |
| Ограничитель грузоподъемности стрелового крана | 1988 |
|
SU1527137A1 |
| УСТРОЙСТВО ДЛЯ ГАШЕНИЯ КОЛЕБАНИЙ ГРУЗА, ПОДВЕШЕННОГО НА РАБОЧИХ ВЕТВЯХ ГРУЗОВОГО КАНАТА СТРЕЛОВОГО КРАНА | 2002 |
|
RU2235054C2 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА И ОПУСКАНИЯ ГРУЗА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298520C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ МЕХАНИЗМА ПОДЪЕМА И ОПУСКАНИЯ ГРУЗА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2309890C2 |
| Устройство для управления лебедками грейферного крана | 1989 |
|
SU1730021A1 |
Использование: изобретение может быть использовано в подъем но-транспортном машиностроении в качестве устройства для управления электроприводами механизмов подъема двухтягового стрелового крана. Сущность изобретения: 2 датчика контроля состояния грузовых канатов (1, 2), разностный усилитель (5), 2 согласующих усилителя (3, 4), 2 командоаппарата(6, 13), 2 реле (8, 12) с 2 контактами (7, 10), инвертор
Изобретение относится к подъемно- транспортному оборудованию.
Известно устройство для управления приводами грузовых лебедок стрелового крана, содержащее датчики длины грузовых канатов, разностные усилители, блоки памяти, командоаппараты, реле, блоки управления электроприводами, задатчик режима работы и источники электропитания.
Недостаток устройства заключается в невысокой надежности, обусловленной его сложностью.
Целью изобретения является повышение надежности.
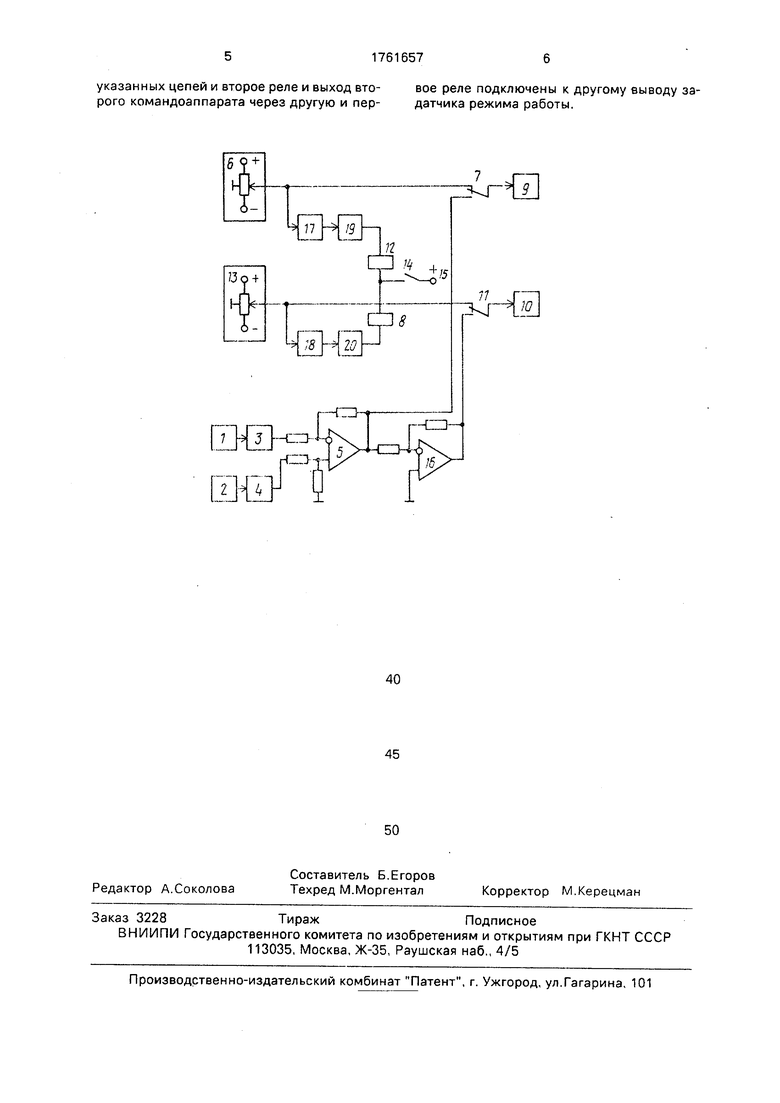
На чертеже приведена структурная схема предлагаемого устройства.
Устройство для управления электроприводами механизмов подъема стрелового крана содержит датчики 1 и 2 контроля состояния грузовых канатов (например, их натяжения) правого и левого механизмов подъема, связанные через согласующие усилители 3 и 4 с входами разностного усилителя 5. Выходы усилителя 5 и первого командоаппарата 6 подключены через контакты 7 реле 8 к входу блока 9 управления электроприводом правого механизма подъема. Вход блока 10 управления электроприводом левого механизма подъема связан через размыкающие контакты 11 реле 12 с выходом второго командоаппарата 13. Задатчик 14 режима работы соединен одним выводом с источником 15 питания. Устройство снабжено инвертором 16, подключенным входом к выходу усилителя 5, а выходом к замыкающим контактам 11 реле 12, и цепями из последовательно соединенных выпрямителя 17 (18) и нуль-органа 19 (20). При этом выход командсаппарата 6 через выпрямитель 17, нуль-орган 19 и реле 12, а выход командоаппарата 13 через выпрямитель 18, нуль-орган 20 и реле 8 подключены к другому выводу задатчика 14.
Устройство для управления электроприводами механизмов подъема стрелового крана работает следующим образом.
х| о
сл XI
При раздельной независимой работе механизмов подъема задатчик 14 устанавливается в разомкнутое состояние. Реле 8 и
12обесточиваются, и командоаппараты 6 и
13через контакты 7 и 11 воздействуют на блоки 9 и 10 управления электроприводами соответствующих механизмов подъема непосредственно. В этом случае соотношение величин контролируемого параметра, в частности натяжений грузовых канатов, может быть произвольным.
При совместной работе правого и левого механизмов подъема, требующей равномерного распределения усилий между ними (например, при подъеме предельных грузов или при укладке стрелы крана по-походному), задатчик 14 устанавливается в замкнутое состояние. Реле 8 и 12 подключаются к источнику 15 и тем самым подготавливаются к работе в совместном режиме. При выводе движка командоаппарата 13 из нейтрального положенгия на его выходе появляется напряжение, отличное от нуля, величина и полярность которого определяют скорость и направление работы левого механизма подъема. Одновременно с этим на выходе выпрямителя 18 появляется напряжение положительной полярности, вызывающее последовательное срабатывание нуль-органа 20 и реле 8. В результате через переключившийся контакт 7 к входу блока 9 подключается выход усилителя 5. При перемещении движка командоаппарата 13 из нейтрального положения вверх на его выходе появляется напряжение положительной полярности, вызывающее наматывание грузового каната на барабан лебедки, приводящее к увеличению его натяжения. В результате сигнал на выходе датчика 2 возрастает и начинает превышать сигнал на выходе датчика 1. При этом напряжение на выходе усилителя 5 становится положительным, вызывая наматывание грузового каната на барабан лебедки правого механизма подъема. Указанный процесс продолжается до тех пор, пока усилия в грузовых канатах не выравняются, и напряжение на выходе усилителя 5 не станет близким к нулю.
При перемещении движка командоаппарата 13 из нейтрального положения вниз на его выходе появляется напряжение отрицательной полярности, вызывающее сматывание грузового каната с барабана лебедки, приводящее к ослаблению его натяжения. В результате сигнал на выходе датчика 2 падает и становится меньше сигнала на выходе датчика 1. При этом напряжение на выходе усилителя 5 становится отрицательным, вызывая сматывание грузового каната с барабана лебедки правого механизма
подъема и также приводя к выравниванию усилий в грузовых канатах. Таким образом, управление совместной работой механизмов подъема в рассмотренном случае осуществляется с помощью командоаппарата 13 при находящемся в нейтральном положении командоаппарате 6, при этом левый механизм является ведущим, а правый - ведомым.
0
При выводе из нейтрального положения движка командоаппарата 6 и находящемся в нейтральном положении движке командоаппарата 13 ведущим становится правый
5 механизм подъема, а ведомым - левый. В этом случае срабатывает реле 12, подключая своим контактом 11 к блоку 10 выход инвертора 16. При превышении сигналом датчика 1 сигнала датчика 2 напряжение на
0 выходе усилителя 5 отрицательно, а на выходе инвертора 16 положительно, Благодаря этому ведомый левый механизм подъема работает в направлении, уменьшающем разность усилий в канатах. Аналогичный ре5 зультат достигается и при уменьшении сигнала датчика 1 по отношению к сигналу датчика 2.
Попытка одновременной работы в совместном режиме командоаппаратами 6 и
0 13 приводит к срабатыванию реле 8, 12 и остановке обоих механизмов подъема. Дальнейшее продолжение работы возможно при установке одного из командоаппара- тов 6 и 13 в нейтральное положение.
5 Таким образом, устройство обеспечивает автоматическое выравнивание усилий в грузовых канатах механизмов подъема в наиболее ответственных режимах работы крана.
0 Формула изобретения
Устройство для управления электроприводами механизмов подъема стрелового крана, содержащее датчики контроля состояния грузовых канатов, связанные выхода5 ми с входами разностного усилителя, выход которого и выход первого командоаппарата подключены через контакты первого реле к входу одного из блоков управления электроприводом, вход другого из которых связан
0 через одни контакты второго реле с выходом второго командоаппарата, и задатчик режима работы, связанный одним выводом с источником питания, отличающееся тем, что, с целью повышения надежности,
5 оно снабжено подключенным входом к выходу разностного усилителя, а выходом - к другим контактам второго реле инвертором, и цепями из последовательно соединенных выпрямителя и нуль-органа, при этом выход первого командоаппарата через одну из
указанных цепей и второе реле и выход вто- вое реле подключены к другому выводу зэ- рого командоаппарата через другую и пер- датчика режима работы.
-vj-зЗ-й
| Устройство для управления приводами грузовых лебедок стрелового крана | 1986 |
|
SU1407896A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
