Изобретение относится к судостро-. ению, в частности к системам стабилизации судна по курсу и бортовой качке..
Известна система стабилизации суд|на по курсу и бортовой качке, содержащая сельсин-приемник курса, подключенный к гирокомпасу и связанный через механический дифференциал с датчиком управляющего сигнала, к выходу Которого подключены соединенные параллельно дифференцирукяцее и интегрирунвдее устройства, а также содержащая датчик обратной связи, подключенный к входу усилителя мощности и связанный с выходом последнего исполнительный механизм ..
Недостаток известной системы недостаточная надежность в 1работе.
Цель изобретения - повышение .на- . дежнрсти системы в работе.
для этого система стабилизации судна по курсу и борт:овой качке, содержащая сельсин-приемник курса, подключенный к гидрокомпасу и связанный через механический дифференциал с датчиком управляквдего сигнала, к выходу которого подключены соединенные параллельно дифференцирукидее и интегрирующее устройства, а также 5одержащая датчик обратной связи, подключенный к входу усили1;еля мсмвдости, и связанный с выходом последнего исполнительный механизм, снабжена последовательно соединенньвли датчиком 6ОР7 товой качки, демодулятором с фильтром , дифференцирукяцим усилителем, сумиирукицим - усилителем и модулятором, выход которого связан с входами дифференцирующего и интегриругацего устройств и усилителя мощности, а также инвертирующим усилителем, подключеннь между выходом демодулятора с фильтро и вторым входом суммирующего усилите ля, при этом выход интегрирующего . устройства соединен с выходом датчика обратной связи.
На Чертеже представлена функциональная схема предлагаемой системы стабилизации судна по курсу и бортовой .
I
Система содержит авторулевой 1, состоящий из сельсина-приемника 2 курса, подключенного к гидрокомйасу/ механического дифференциала 3, датчика 4 управляющего сигнала, дифференцирующего 5 и интегрируквдего 6 устройств, усилителя 7 мощности,исполнительного механизма 8, рулевой машины 9, датчика 10 обратной связи,, датчика 11 бортовой качки, выход которого соединен с входом демодулятора 12 с фильтром. Выход демодулятора 12 с фильтром соединен с входами дифференцируняцего 13 и инвертирующего 14
усилителей, выходы которых подключены на первый и второй- входы суммирунядего усилителя 15, который соединен с входбм модулятора 16, выход ,кото,рого соединен с выходом датчика 4, выходом дифференцирукядего 5 и интегриругацего 6 устройств, выходом датчика 10 обратной связи и подключен на вход усилителя 7 мощности авторулевого . ;
.
Система стабилизации судна по курсу и бортовой качке работает следующим образом.
При отклонении судна от заданного курса от гидрЬксадпаса в авторулевой 1 поступает сигнал на сельсин-приемник 2, который через дифференциал 3 будет разворачивать датчик 4, электрически связанный с дифференцирующим 5и интегрирующим б устройствами. На выходе датчика 4, дифференцирунвдего 5 и интегрирукяяего 6 устройств появятся сигналы, пропорциональные углу, скорости и интегралу от угла -рыскания. Так как имеется гидродинамическая связь между рысканием и бортовой качкой, то с датчика 11 бертовой качки поступает сигнал на демодулятор 12 с фильтром. Сглаженный сигнал подается на входы дифференцируквдего 13 и инвертируквдего 14 усилителей С вы-s хода усилителей 13 и 1.4 сигМалы:,- пропорциональные скорости н углу бордовой качки, поступают на первый и второй входы суммирующего усилителя 15. Суммарный сигнал с выхода уйилмтёдя 15 подается на вход модулятора 16.С выхода модулятора 16 Суммарный сйгйал пропорциональный углу, и .скорости :бортовой качки, суммируясь с сигна:л.ами, пропорциональными углу, скорости и интегралу, от угла ралскания поступает йа вход усияитёля 7 мощностиавторул вого. .
Уси.пеннЕ91й сигнал поступает на вход исполнительного механизма 8, который воздействует Ма рулевую машину 9, которая перекладывает ру.ль да тех; пор пока сигнал с датчика 10 обратной евязи не будет равен суммарному сигналу, пропорциональному урлу, скорости, интегралу от угла рьюкания и углу и скорости бОртовой качки. Под действием руля величина рьаскания а, следовательно, и бортовой качки уменьшается, так как сигнал по бортовой качке содержит высокочастотнью составляющие , то при его дифференцирова.нии на вход усилителя 7 мощности будут поступать высокочастотные сигналы большой величины. Это приводит кчастьй« вкгаочейиям исполнительного механизма 8 рулев6 Ь машины, что снижает надежность работы системы стаби лизации. Применение демодулятора 12
3i030260
с фильтром позволяет уменьшить коли- За счет упрощения конструкции предчество включений исполнительного ме- . лагаемая снстеМа стабилизации рбЛгщает ханизма 8. повьлаенной надежнЬстью в работе.
-. 
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического управления курсом судна | 1984 |
|
SU1237555A1 |
| Авторулевой | 1988 |
|
SU1579851A1 |
| Система управления курсом судна | 1983 |
|
SU1131772A1 |
| Автоматическая система управления рулемСудНА | 1979 |
|
SU839859A1 |
| Авторулевой | 1988 |
|
SU1527092A1 |
| Судовой авторулевой | 1982 |
|
SU1017594A1 |
| АВТОРУЛЕВОЙ ДЛЯ СУДОВ | 1969 |
|
SU254356A1 |
| Авторулевой | 1988 |
|
SU1533950A1 |
| Стенд для регулировки и испытаний системы управления курсом судна | 1982 |
|
SU1063710A1 |
| Авторулевой | 1979 |
|
SU842725A1 |
СИСТЕМА СТАБИЛИЗАЦИИ СУДНА ПО КУРСУ Й-БОРТОВОЙ КАЧКЕ, содержащая сельсин-приемник курса, ПОДКЛЮ-. ченный к гирокомпасу и связанный через механический дифференциал с датчиком управлякяцего сигнала, к выходу которого подключены соединенные параллельно дйФФеренцир5чощее и интёгрирукнцее устройства, а также содержащая датчик обратной связи, подключенный к входу усилителя мощности, и связанный с выходом, последнего исполнительный механизм, о.т л и ч а ю щ ая с я тем, что, с целью повышения надежности в работе, она. снабжена последовательно соединенными датчиком бортовой качки, демодулятором с фильтром, дифференцирующим усилителем, суммирующим усилителем и модулятором, выход которого связан с входами дифференцирующего и интегрирующего устройств и усилителя мощности, а также инвертирующим усилителем, подключенным между выходом демодулятора с фильтром и вторым входом сум-g мирующего усилителя, при этом выход W интегрирующего устройства соединен с выходом датчика обратной связи. 00 о ND Ot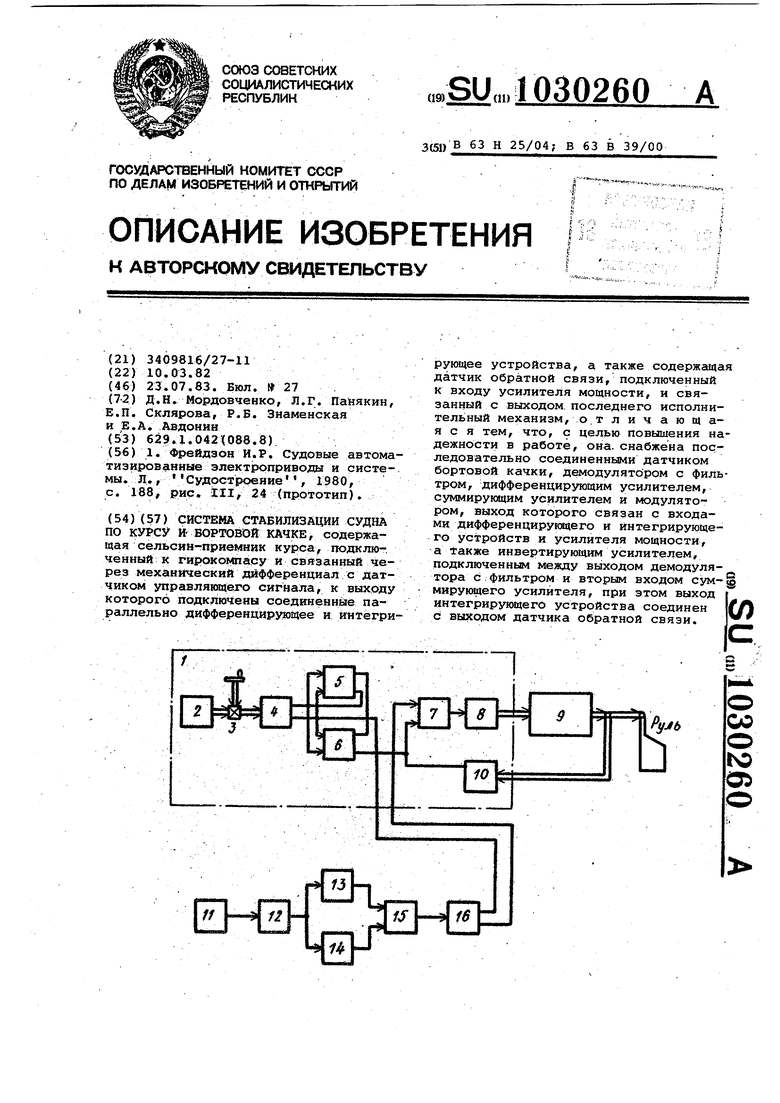
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Фрейдаон И.Р | |||
| Судовые автоматизированные электроприводы и снстемы | |||
| Л., Судостроение, 1980/ с | |||
| Поршень для воздушных тормозов с сжатым воздухом | 1921 |
|
SU188A1 |
