Изобретение относится к устройствам автоматического управления судном.
Известны электрические бесконтактные авторулевые для судов, содержащие датчик курса, дифференцирующее и интегрирующее устройства, устройство обратной связи и исполнительные механизмы.
В таких авторулевых отсутствует приспособление для регулирования скорости интегрирования, регулируемый ограничитель выходного напряжения дифференцирующего и интегрирующего устройств, механическое соединение интегрирующего и дифференцирующего устройств с лринимающим сельсином курса.
Особенностью предлагаемого авторулевого является то, что датчик курса электрически соединен с дифференцирующим и интегрирующим устройствами. На вход интегрирующего устройства подключен регулятор скорости интегрирования, а на выходы дифференцирующего и интегрирующего устройств - регулируемые ограничители выходного напряжения.
Для уменьшения числа кладок руля при сохранении требуемой точности стабилизации судна на курсе ограничители выходного напряжения могут быть электрически соединены с регулятором коэффициента обратной связи. Это способствует упрощению конструкции и улучщению стабилизации судна на заданном курсе.
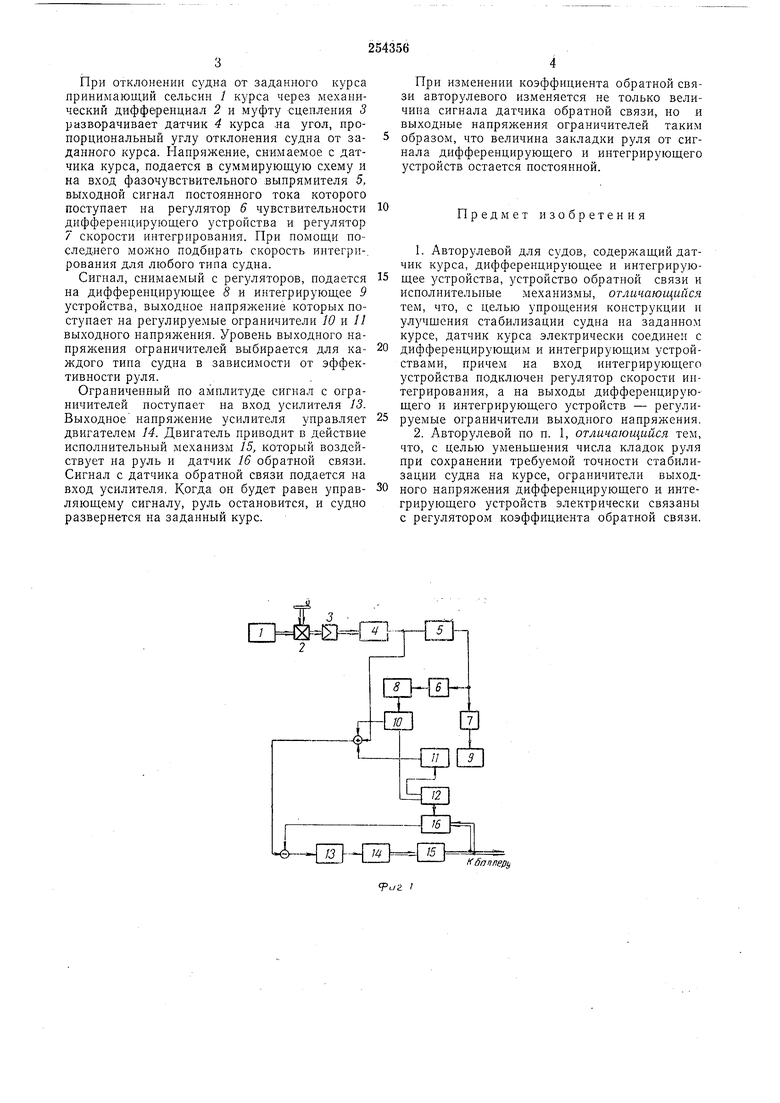
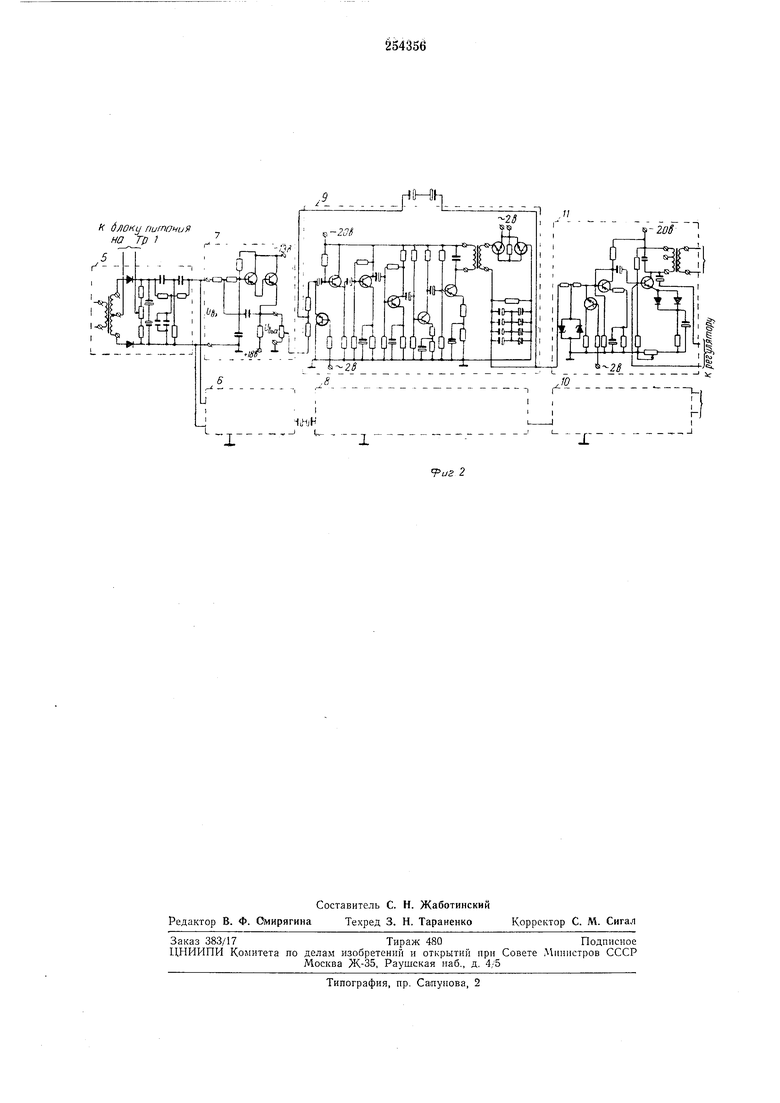
На фиг. I изображена функциональная схема предлагаемого авторулевого; на фиг. 2 - принципиальные схемы фазочувствительного выпрямителя, регулятора скорости интегрировапия, интегрирующего устройства и ограничителя выходного напрял ения.
Принимающий сельсин / курса через механический дифференциал 2 и муфту 3 кинематически связан с датчиком 4 курса, который
электрически соединен с фазочувствительным выпрямителем 5.
В схему авторулевого включены регулятор 6 чувствительности дифференцирующего устройства и регулятор скорости 7 интегрирования, которые соответственно электрически соединены с дифференцирующим 8 и интегрирующим 9 устройствами. На выходы этих устройств подключены регулируемые ограничители W и 11 выходного напряжения.
При этом ограничители выходного напряжения электрически соединены с регулятором 12 коэффициента обратной связи. Выходы ограничителей подключены на вход усилителя 13, который, в свою очередь, подключен к двигателю 14, механически связанному с исполнительным механизмом 15 и датчиком 16 обратной связи, который электрически соединен с регулятором коэффициента обратной связи. Действие авторулевого осуществляется слеПри отклонении судна от заданного курса принимающий сельсин / курса через механический дифференциал 2 и муфту сцепления 3 разворачивает датчик 4 курса ,на угол, пропорциональный углу отклонения судна от заданного курса. Напряжение, снимаемое с датчика курса, подается в суммирующую схему и на вход фазочувствительного выпрямителя 5, выходной сигнал постоянного тока которого поступает на регулятор 6 чувствительности дифференцирующего устройства и регулятор 7 скорости интегрирования. При помощи последнего можно подбирать скорость интегри-. рования для любого типа судна. Сигнал, снимаемый с регуляторов, подается на дифференцирующее 8 и интегрирующее 9 устройства, выходное напряжение которых поступает на регулируемые ограничители JO и 11 выходного напряжения. Уровень выходного напрял ения ограничителей выбирается для каждого типа судна в зависимости от эффективности руля. Ограниченный по амплитуде сигнал с ограничителей поступает на вход усилителя 13. Выходное напряжение усилителя управляет двигателем 14. Двигатель приводит в действие исполнительный механизм 15, который воздействует на руль и датчик 16 обратной связи. Сигнал с датчика обратной связи подается на вход усилителя. Когда он будет равен управляющему сигналу, руль остановится, и судно развернется на заданный курс. При изменении коэффициента обратной связи авторулевого изменяется не только величина сигнала датчика обратной связи, но и выходные напряжения ограничителей таким образом, что величина закладки руля от сигнала дифференцирующего и интегрирующего устройств остается постоянной. Предмет изобретения 1.Авторулевой для судов, содержащий датчик курса, дифференцирующее и интегрирующее устройства, устройство обратной связи и исполнительные механизмы, отличающийся тем, что, с целью упрощения конструкции и улучщения стабилизации судна на заданном курсе, датчик курса электрически соединен с дифференцирующим и интегрирующим устройствами, причем на вход интегрирующего устройства подключен регулятор скорости интегрирования, а на выходы дифференцирующего и интегрирующего устройств - регулируемые ограничители выходного напряжения. 2.Авторулевой по п. 1, отличающийся тем, что, с целью уменьшения числа кладок руля при сохранении требуемой точности стабилизации судна на курсе, ограничители выходного напряжения дифференцирующего и интегрирующего устройств электрически связаны с регулятором коэффициента обратной связи.
| название | год | авторы | номер документа |
|---|---|---|---|
| Авторулевой | 1988 |
|
SU1527092A1 |
| СИСТЕМА УПРАВЛЕНИЯ СИЛОВЫМ ГИДРАВЛИЧЕСКИМ ПРИВОДОЛ1 СУДОВОГОРУЛЯ | 1967 |
|
SU206335A1 |
| Авторулевой | 1988 |
|
SU1579851A1 |
| Система стабилизации судна по курсу и бортовой качке | 1982 |
|
SU1030260A1 |
| СУДОВОЙ АВТОРУЛЕВОЙ | 1972 |
|
SU337300A1 |
| АВТОРУЛЕВОЙ | 1969 |
|
SU239404A1 |
| Автоматическая система управления рулемСудНА | 1979 |
|
SU839859A1 |
| Авторулевой | 1988 |
|
SU1533950A1 |
| АВТОРУЛЕВОЙ | 1962 |
|
SU147104A1 |
| Авторулевой | 1988 |
|
SU1625780A1 |
к блоку Питания на Тр ) j -LLJ
