Изобретение относится к захватам для штучных грузов, включающим лриспособление для .подвешивания к крюку грозоподъемного устройства, зпхватываюш;ие рычаги и управляющую систему, содержащую две пары пересекающихся -между собой в виде ножниц тяг, одни концы которых соединены в узлах, образующих упорный и центральный шарниры захвата, а другие щарнирно соеди нены с захватывающими рычатами так, что верхние из них могут с помощью пальцев перемещаться в вертикальных наиравляющих пазах захватывающих рычагов. Однако при подъеме и транспортировке грузов с применением захватов такого вида груз, например рулон листового материала, начинает отделяться от опорно: поверхности только в тот момент, когда оба захватывающих рычага .прочно его захватывают в двух местах. Во многих случаях в этот момент средняя плоскость захвата находится в наклонном положении по отношению к вертикали. Такое явление наблюдается в тех случаях, когда оба места захвата находятся не точно на одном уровне. В результате этого з момент начала отделения груза от поверхности о-поры под действием захзата центр тяжести системы захват-поднимаемый груз смещается и занимает положение, которое находится вне линии приложения усилия натяжения, оказываемого на этот захват. Система «ачипает при этом вращаться -вокруг одной или нескольких точек соприкосновения груза с опорной поверхностью до того момента, пока
центр тяжести системы не переместится и не займет положение ва упомянутой линии приложения усилия натяжения. Таким образом, на груз оказывается боковое -воздействие, направленное по прямой линии, перпендикулярной прямой ЛИН1П1 приложения подъемного усилия. При всех прочих равных з-словиях это боковое действие настолько превышает усилие натял ения, насколько центр тяжести системы захват-груз более удален от линии
усилия натяжения. Нежелательный эффект, вызванный боковы.м действие.м, является особенно значительным тогда, когда поднимаемый груз представляет собой рулон очень тонкого листового материала, поскольку в таких случаях может иметь место раздавливание кромок ру.пона листового материала. Кроме того, вследствие наклонного положения захвата линия прилол ения усилия натяжения не совпадает с осью подвешивающего
приспособления захвата. В результате этого подзешнвающге приспособление испытывает значительное нзгабаюшее усилие, которое в большинстве случаев может привести к такому нежелательному явлению, как разрушевания, но также системы управления захватом.
Предлагаемый захват отличается тем, что приспособление для подвешивапия захвата к крюку грузоподъемного устройства .поворотно соединено с центральным шарниром захвата и .прохо:дит через узел упорного шарнира, внутри которого имеются .предварительно напряженные плоские нружины, оказывающие на подвешизающее приспособление противоположно направленные действия. Это предотвращает перекос захвата с грузОМ при неодновременном .подходе захватывающих рычагов к позерхаосги 1руза.
Подвещивающее Приспособление может быть выполнено в .виде тяги, под1верже11ной воздействию одной пгры плоских пружин, расположенных в узле упорного щарнира. Кроме того, подвешивающее приспособление может быть выполпено в виде вилочной тяги, одинарный стержень которой соединен с центральным шарниром и на уровне .оси упорного шарнира разделен на два стержня, калсдый из которых подвержен воздействию предварительных напряженных плоских пружин.
На фиг. 1 схематически изображен предлагаемый захват в одном из вариантов исполнения, общий .вид; на фиг. 2 - один из участ.ков упорного шарнира, соответствующего другому варианту исполнения захвата, IB а.ксонометрии.
Захват содержит два захватывающих рычага / .и 2, снабженных .парой лап 5 и 4, предназначенных для удержания тяжелых грузов, например рулонов листового материала 5. Оба захватывающих рычага 1 w. 2 снабжены удлинениями, представляющими собой пару направляющих элементов 5 и 7, в которых предусмотрены пазы S и 5. Рычаги / и 2 щарнирио соединены с концами двух пар .пересекающихся в виде ножниц тяг 10 и 11, шарнирно закрепленными на оси вращения 12, и тягами 13 и 14, шарнирно закрепленными на оси вращения 15. Одни концы тяг 11 и 14 щарнирно укреплены на захватывающих рычагах У и 2, имея возмолсность вращения соответственно на осях 16 и 17. Другие концы этих тяг шарнирно установлены на оси 18 вращения упорного шарнира.
О.ДНИ концы тяг 10 и 13 шариирно соединены один с другим, имея возможность вращения iBOiKpyr оси 19 центрального шарнира. Каждый из других концов тяг 10 и 13 имеет пальцы 20 и 21, которые могут свободно скользить в соответстБующпх пазах S и 9. Тяга 10 соединена со щтоком 22 домкрата 23, служащего для обеспечения расхождения или сблнжения захватывающих рычагов / и 2, которые шарнирно соединены с соответствующими тягами 10 W. 11, 13 i 14.
Ось 19 соединена с тягой 24, которая представляет собой часть приспособления для подвешивания захвата, причем эта деталь подвещивающего приспособления предназначена для зацепления за крюк 25 подъемного устройства. Указанная тяга способна вращаться на оси 19 перпендикулярно к плоскости, определяемой осями захватывающих рычагов 1 к 2.
На щарнирной оси 18 неподвижно установлен уиор 26, имеющий две плоские пружины 27 и 28, которые неподвижно установлены на упоре 26 и предварительно натянуты,
т. е. они оказывают на тягу 24 воздействия равными по величине усилиями даже в том случае, когда тяга 24 находится в вертикальном .ноложении. Пружины 27 и 28 о.казывают на тягу 24 противоположные действия, что
заставляет ее перемещаться в направлении средней плоскости захвата. В том случае, если плоские пружины 27 и 28 црижимаются к стенке упора 26 с максимальным усилием, они представляют собой ограничительные
буфера, которые непо.движно установлены по отношению к остальной части захвата.
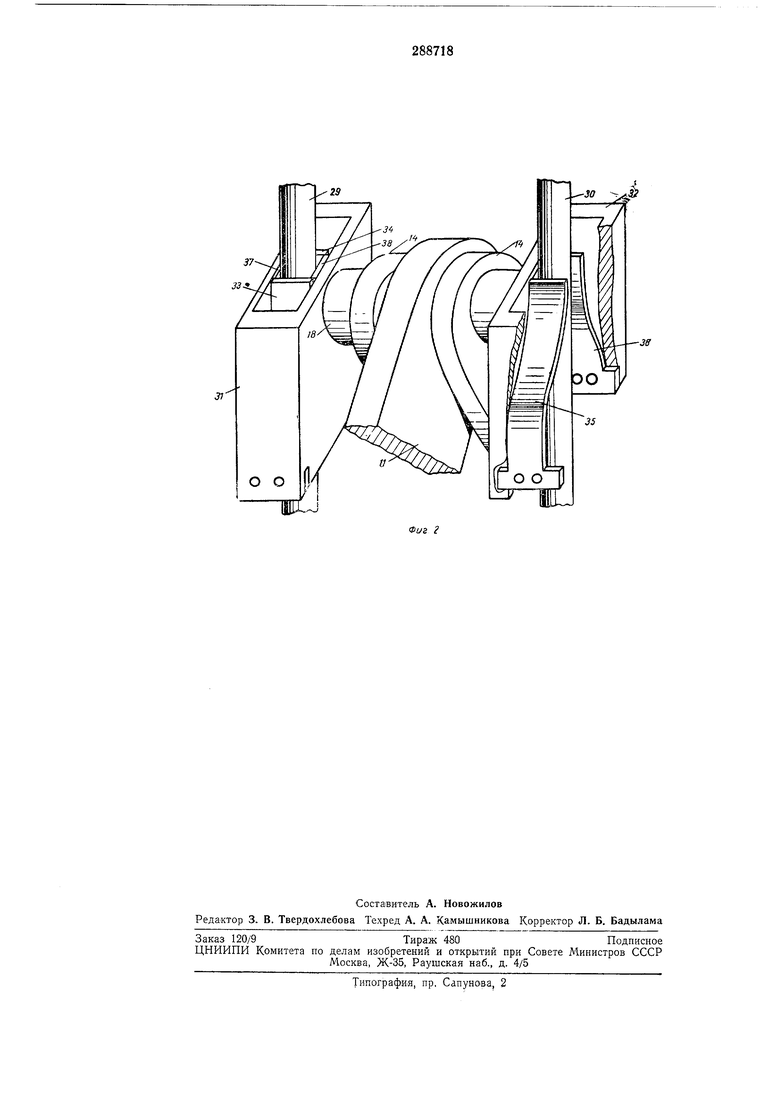
Согласно второму варианту исполнения зах1вата тяга подвешивающего приспособления выполнена вилочной, одинарный стержень которой на уровне щарнирной оси 18 подразделяется аа два параллельных стержня 29 и 30, проходящих по обе стороны по отношению к шарнирной оси 18. По концам щарнирной оси 18 неподвижно установлены
идентичные по конструкции коробки 31 и 32, внутри которых проходят соответственно стержни 29 и 30. Оба упора 31 и 32 предусматривают наличие плоских пружин 33-36. Пружины 33 и 34 жестко закреплены в коробке 31, а пружины 35 и 36 - в коробке 32. Пружины 33 и 34 оказывают противоположное действие на стерл ень 29, а пружины 35 и 36 - на стержень 30, заставляя одновременно стержни 24, 29 и 30 перем.ещаться в направлении средней плоскости захвата, что возмолсно в том случае, когда стержень 24 поворачивается на некоторый угол, который равен по меньшей мере нескольким градусам, на шарнирной оси 19.
В том случае, когда стержни 24, 29 и 30 находятся в средней плоскости, плоские прул ины 33 № 34 с одной стороны и плоские 35 и 36 с другой стороны удерживаются от стержней (соответственно 29 и 30)
па некотором расстоянии с помощью упорных элементов 37 и 38, которые неподвижно установлены в коробках 31 и 32. Плоские пружины 33 .и 34, 35 и 36 поставлены в предварительно напрял ;енное положение, оии.раясь при этом на упорные элементы 37 и 38, что позволяет поддерживать захват постоянно в вертикальном положении несмотря на трение, возникающее между его шарнирной осью вращения и тягой подвешивающего
приспособления.
Предмет изобретения
и состоящий из захватывающих рычагов и управляющей системы, содержащей две пары пересекающихся между собой в виде иож1-1И1Ц тяг, одни концы которых соединены в узлах, образующих упорный и .центральный шарниры захвата, а другие щарНирно соединены с захватывающими рычагами так, что ъерхиие из них могут с иомощью нальцев перемещаться в вертикальных направляющих пазах захватывающих рычагов, отличающийся тем, ITO, с целью .предотвращения перекоса захвата с грузом три неодновременном подходе захватывающих рычагов к /поверхности груза, приспособление для подвещивания захвата к крюку грузоподъемного устройства поворотно соединено с центральным щарниром захвата и проходит через узел упорного щарпира, -внутри которого имеются предварительно напряженные плоские пружины, оказывающие на подвещивающее приспособление противоположно направленные действи..
2. Захват по п. 1, отличающийся тем, что подващивающее приспособление выполнено в виде тяги, подверженной воздействию одной пары плоских пружин, расположенных в узле упорного щарнира.
3. Захват по п. 1, отличающийся тем, что подвещивающее приспособление выполнено в ВИде вилочной тяги, одинарный стержень которой соединен с центральным шарниром и на уровне оси упорного ща-рнира разделен
на два стержня, каждый из которых подвержен Воздействию предварительно напряженных плоских пружин.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТ-КАНТОВАТЕЛЬ ДЛЯ ГРУЗОВ ЦИЛИНДРИЧЕСКОЙ ФОРМЫ | 1973 |
|
SU388994A1 |
| КРАНОВЫЙ ВИЛОЧНЫЙ ЗАХВАТ | 1969 |
|
SU255518A1 |
| Автоматический сцепной прибор для железнодорожных вагонов | 1926 |
|
SU4542A1 |
| Клещевой захват | 1982 |
|
SU1008137A1 |
| ВСЕСОЮЗНАЯ I iATLfiTijO-iU.i;:'" Hri | 1973 |
|
SU365322A1 |
| Вилочный захват | 1974 |
|
SU619439A1 |
| Приспособление для захвата грузов | 1959 |
|
SU127013A1 |
| УРАВНОВЕШЕННЫЙ КРАНОВЫЙ ВИЛОЧНЫЙЗАХВАТ | 1971 |
|
SU420535A1 |
| Вилочный захват для штучныхгРузОВ | 1978 |
|
SU804565A1 |
| Устройство для захвата плоских деталей | 1988 |
|
SU1744039A1 |

20
37
33
