1
Изобретение относится к механизации погрузочно-выгрузочных работ, в частности к грузозахватным устройствам, и может применяться при перегрузке тарно-штучных грузов, уложенных на поддонах, например при загрузке и разгрузке трюмов морских судов.
Известны уравновешенные крановые вилочные захваты, содержащие траверсу с пружинной подвеской, несущую подхвагные вилы, стойки которых соединены с траверсой с помощью верхних и нижних тяг, образующих совместно с траверсой и стойками шарнирные параллелограммы, и пружины с регулировочным приспособлением, соединяющие траверсу со стойками вил.
Однако в известных захватах регулировочное приспособление имеет сложную конструкцию и требует значительного времени для натяжения или ослабления пружин подвески.
Цель изобретения - повысить надежность и обеспечить удобство в обслуживании захвата.
Для этого нижние тяги .параллелограммов дололнительно соединены ломающимися тягами и снабжены хвостовиками, взаимодействующими с упорами, закрепленными на стойках вил. Причем нижние концы пружин подвески прикреплены к траверсе при помощи эксцентриковых рычагов.
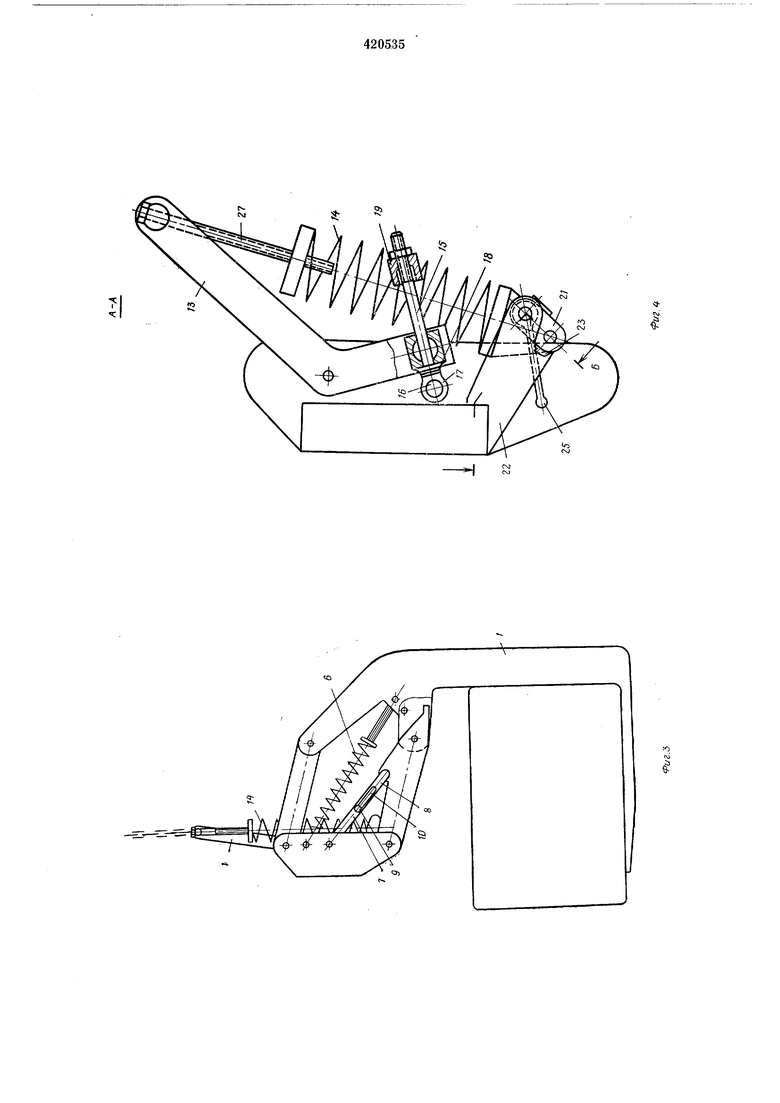
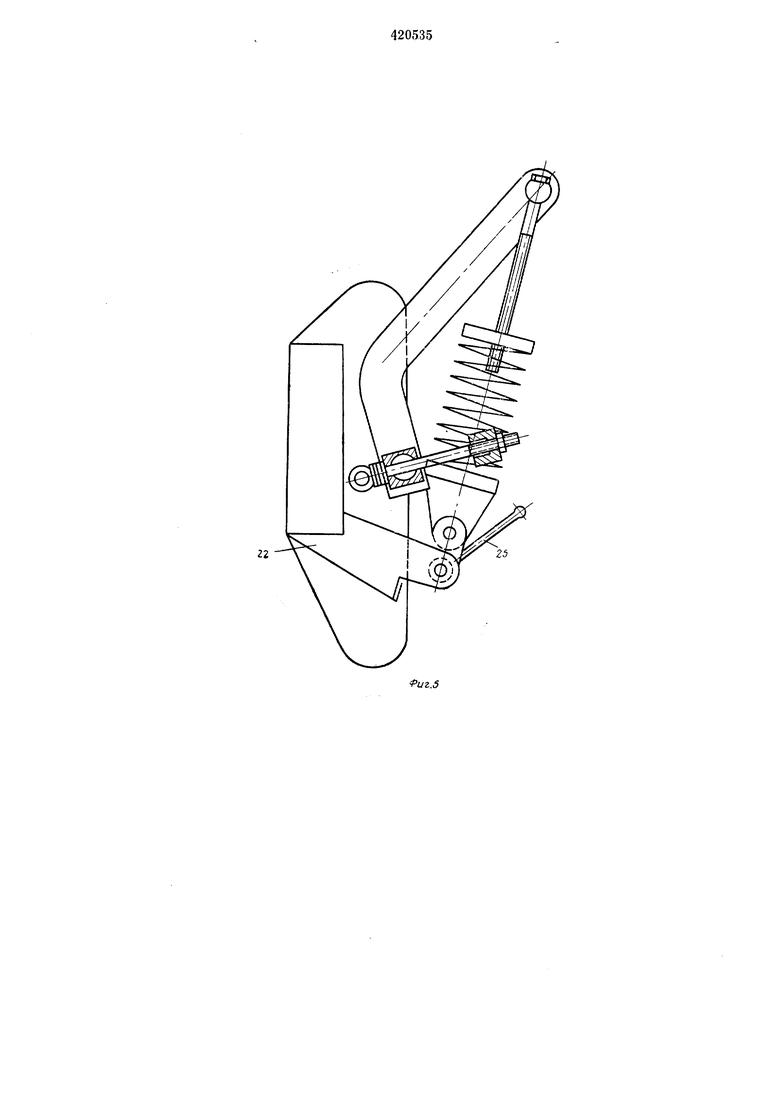
На фиг. 1 и 2 изображен уравновешенный крановый вилочный захват без груза, две проекции; на фиг. 3 - захват с грузом; на фиг. 4 - разрез по А-А на фиг. 2; на
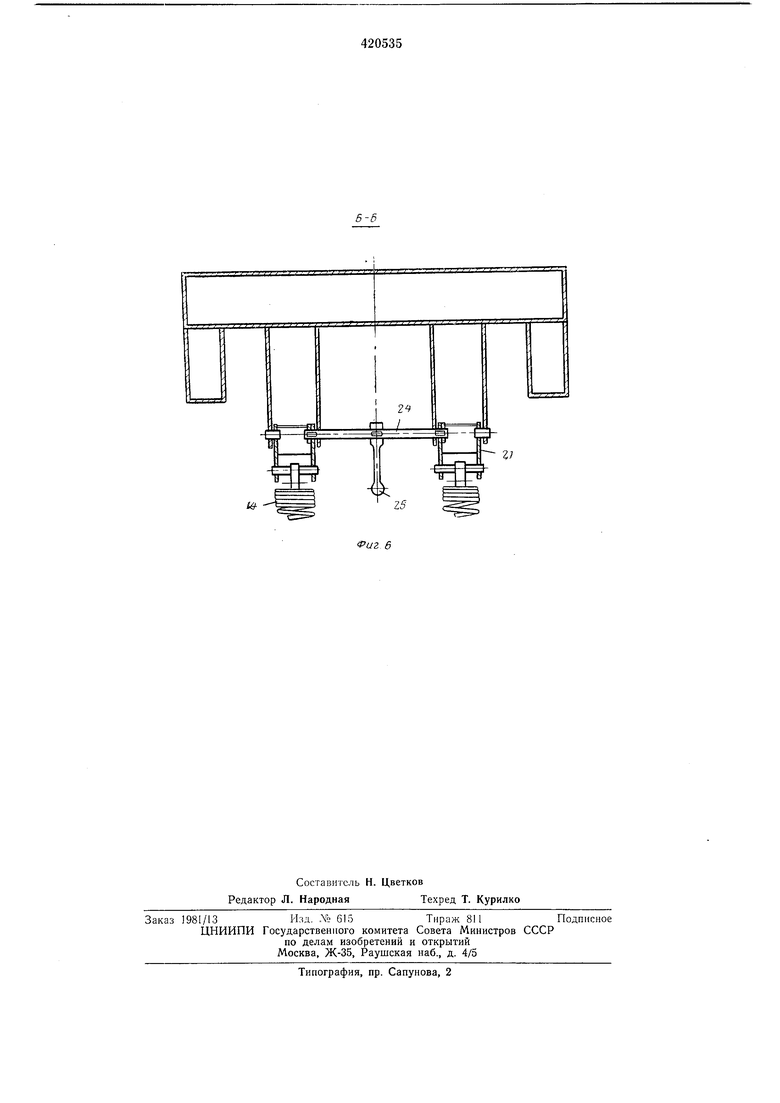
фиг. 5 - то же, с ослабленными пружинами; на фиг. 6 - разрез по Б-Б на фиг. 4.
Захват состоит из вил 1, соединенных шарнир,но тягами 2 и 3 с траверсой 4. Каждая вила совместно с траверсой 4 и своей парой тяг
образует независимый шарнирный параллелограмм, обеспечивающий раздельное перемещение вил по вертикали.
Вилы 1 снабжены рукоятками 5, служащими для управления захватом, и соединены с
траверсой 4, также пружинами б, уравновешивающими собственный вес вил и тяг.
Траверса 4 связана с тягами 3 при помощи ломающихся тяг, выполненных в виде поворотных стержней 7 и 8, которые соединены
друг с другом пальцем 9, перемещающимся в прорези 10.
Хвостовики 11 тяг 3 взаимодействуют с закрепленными на стойках вил упорами 12, которые ограничивают ход вил вверх относительно траверсы 4.
К траверсе шарн-ирно прикреплен двуплечий рычаг 13, верхний конец которого связан с траверсой пружинами 14, а .нижний скользит по стержню 15, шарнирно соединенному
с траверсой 4 пальцем 16. У нижнего конца
стержня 15 имеется выступ 17 и набор шайб 18, ограничивающих ход двуплечего рычага 13. Верхний копен стержня 15 имеет резьбу, на которую навернут упор 19, огра.ничивающий ход двуплечего рычага вверх.
К верхнему концу рычага 13 присоединена цепная подвеска 20. Нижние концы .пружин 14 подвески 20 прикреплены к траверсе 4 при помощи эксцентриковых рычагов 21, укрепленных на кронщтейнах 22, снабженных упорами 23, ограничивающими ход эксцентриковых рычагов. Эксцентриковые рычаги 21 жестко соединены с валиком 24, на который жестко насажена рукоятка 25.
Предлагаемый захват работает следующим образом. После навещивания его на крюк крана при отсутствии груза нружины 6 удерживают вилы в верхнем положении, стержпи 7 и 8 расположены ,под углом друг к другу, двуплечий рычаг 13 пружинами 14 онущен в ниж. крайнее положение. При этом нижний конец рычага у-прется в выступ 17 стержня 15. Верхпий конец рычага 13 находится на одной вертикали с центром тяжести порожнего захвата, а вилы расположены горизонтально.
Краном отпускают захват так, что концы вил 1 устанавливаются несколько выше пазов поддона. Рабочий рукоятками 5 опускает каждую вилу до уровня соответствующего наза поддона и заводит ее в пазы. При этом кран перемещает захват по ходу.
При подъеме груза под действием его веса вилы 1 займут нижнее крайнее положение, а стержни 7 и 8 вытянутся в одну линию и ограничат дальнейщее опускание вил.
Двуплечий рычаг 13, преодолев усилие пружин 14, займет крайнее верхнее положение, а нижний конец его соприкоснется с упором 19. Устойчивое положение захвата с грузом обеснечивается тем, что перемещение верхнего конца рычага 13 компенсирует изменение положения центра тяжести захвата с грузом.
Для обеспечения устойчивого положения груза па захвате концы вил должны быть приподняты несколько вверх, что в предлагаемом за.хвате достигается регулировкой положения упора 19.
Освобождение захвата производится в обратном порядке.
После окончания работы захват устанавливают на площадку, крюк крана приспускают. При этом траверса 4 под действием собственного веса опускается, а тяги 2 и 3 поворачиваются до тех Пор, пока хвостовики 11 тяг 3 не войдут в соприкосновение с укрепленньгми на стойках вил 1 упорами 12. Упоры 12 препятствуют дальнейщему повороту тяг 3 и опусканию траверсы 4, удерживая ее
в нижнем крайнем положении. При этом цепная подвеска 20 провисает, что предотвращает удары крюка крана о захват и облегчает навеску захвата на крюк И снятие с него. При длительном хранении захвата в нерабочем состоянии натяжение пружнн 14 ослабляют путем поворота эксцентриковых рычагов 21 рукояткой 25.
Рычаги 21 после прохождения мертвого положения вытягиваются в одну линию с пружинами 14, натяжение которых резко уменьшается.
Перед началом работы натяжение пружин 14 восстанавливается в обратном .порядке. При этом эксцентриковые рычаги 21 прижимаются к упорам 23 кронштейнов 22 и удерживаются в нижнем крайнем положении.
Регулировка натяжения пружин 6 осуществляется вращением болтов 26, а пружин 14 - вращением болтов 27.
Предмет изобретения
Уравновешенный крановый вилочный захват, содержащий траверсу с пружинной подвеской, несущую подхватные вилы, стойки которых соединены с траверсой с помощью верхних и нижних тяг, образующих совместно с траверсой и стойками шарнирные параллелограммы, и 1пружины с регулировочным нриспособлением, соединяющие траверсу со стойками вил, отличающийся тем, что, с целью повыщейия надежности и удобства обслуживания, нижние тяги параллелограммов дополнительно соединены с траверсой ломающимися тягамИ и снабжены хвостовиками, взаимодействующими с упорами, закрепленными на стойках вил, причем нижние концы пружин -подвески прикреплены к траверее при помощи эксцентриковых рычагов. L Л

| название | год | авторы | номер документа |
|---|---|---|---|
| Крановый вилочный захват | 1978 |
|
SU779256A1 |
| КРАНОВЫЙ ВИЛОЧНЫЙ ЗАХВАТ | 1973 |
|
SU405802A1 |
| Вилочный крановый захват | 1959 |
|
SU127942A1 |
| ВСЕСОЮЗНАЯ I iATLfiTijO-iU.i;:'" Hri | 1973 |
|
SU365322A1 |
| Крановый вилочный захват для грузов | 1979 |
|
SU844543A1 |
| Вилочный захват для штучных грузов | 1978 |
|
SU835925A1 |
| Вилочный захват | 1979 |
|
SU867841A1 |
| Вилочный захват | 1981 |
|
SU962177A2 |
| Автоматический захват | 1971 |
|
SU537020A1 |
| Крановый вилочный захват | 1976 |
|
SU629160A2 |