Изобретение относится к погрузочно-разгрузочным работам, в частности к грузозахватным устройствам.
Известен клещевой захват, содержащий шарнирно соединенные между собой и навещиваемые на крюк грузоподъемной мащины клещевины и механизм фиксации клещевин в раскрытом положении, включающий в себя стойку, выполненную из двух щек, одна из которых имеет паз с двумя направляющими скосами и поворотный стержень с пальцем, входящим в паз стойки 1.
Однако известное устройство недостаточно надежно в работе.
Известен также клещевой захват, содержащий раму с щарнирно закрепленными на ней клещевинами, соединенными посредством тяг с навещиваемой на крюк грузоподъемной мащины траверсой, и механизм фиксации клещевин в раскрытом положении, включающий в себя щарнирно закрепленный на раме и подпружиненный с одной стороны относительно щарнира его закрепления стержень с пальцем, смонтированную на траверсе стойку, выполненную из двух щек, одна из которых имеет паз с вертикальным участком и расположенные под углом 45° относительно него и под углом 90° относительно друг друга направляющие скосы и щарнирно закрепленные на щеках одна над другой защелки, щарнирно связанные между собой жесткой тягой и установленные с возможностью взаимодействия с пальцем стержня и с закрепленными по крайней мере, на одной из щек упорами 2.
При работе известного захвата в момент опускания клещевого захвата на груз, параллелограммная подвеска под собственным весом складывается, и вместе с ней опускаются щеки, при этом палец стержня движется по вертикальному пазу и попадает на верхний скос, а затем на нижний, причем стержень отклоняется от вертикального положения, выходит из щек и возвращается в вертикальное положение пружиной. В этом положении клещевой захват производит захват груза. При движении стержня по вертикальному пазу и при попадании его пальца на верхний скос, он будет постоянно поджиматься к верхнему скосу пружиной и чтобы пальцу стержня попасть на нижний скос, щекам необходимо сообщить такую скорость, при которой палец стержня прижатый пружиной к верхнему скосу, оторвался бы от него, прощел расстояние равное ширине вертикального паза и попал бы на нижний скос. Такую скорость, при которой палец стержня, прижатый к верхнему скосу пружиной, попал бы на нижний скос, в ряде случаев сообщить щекам не удается, при этом палец стержня не будет попадать на нижний скос, а будет возвращаться назад по вертикальному Лазу и будет происходить несрабатывание клещевого захвата.
Цель изобретения - повыщение надежности работы захвата. Указанная цель достигается тем, что в клещевом захвате, содержащем раму с щарнирно закрепленными на ней клещевинами, соединенными посредством тяг с навещиваемой на крюк грузоподъемной мащины траверсой, и механизм
фиксации клещевин в раскрытом положении, включающий в себя щарнирно закрепленный на раме и подпружиненный с одной стороны относительно щарнира его закрепления стержень с пальцем, смонтированную на траверсе стойку, выполненную из двух
5 щек, одна из которых имеет паз с вертикальным участком и расположенные под углом 45° относительно него и под углом 90° относительно друг друга направляющие скосы и щарнирно закрепленные на щеках одна над другой защелки, щарнирно связанные между собой жесткой тягой и установленные с возможностью взаимодействия с пальцем стержня и с закрепленными по крайней мере одной из щек упорами, паз между вертикальным участком и
5 направляющими скосами выполнен с наклоном в противоположную от последних сторону и со смещением его оси относительно оси вертикального участка на величину, больщую чем диаметр поперечного сечения пальца стержня, при этом последний дополнительно подпружинен с другой стороны щарннра соединения его с рамой.
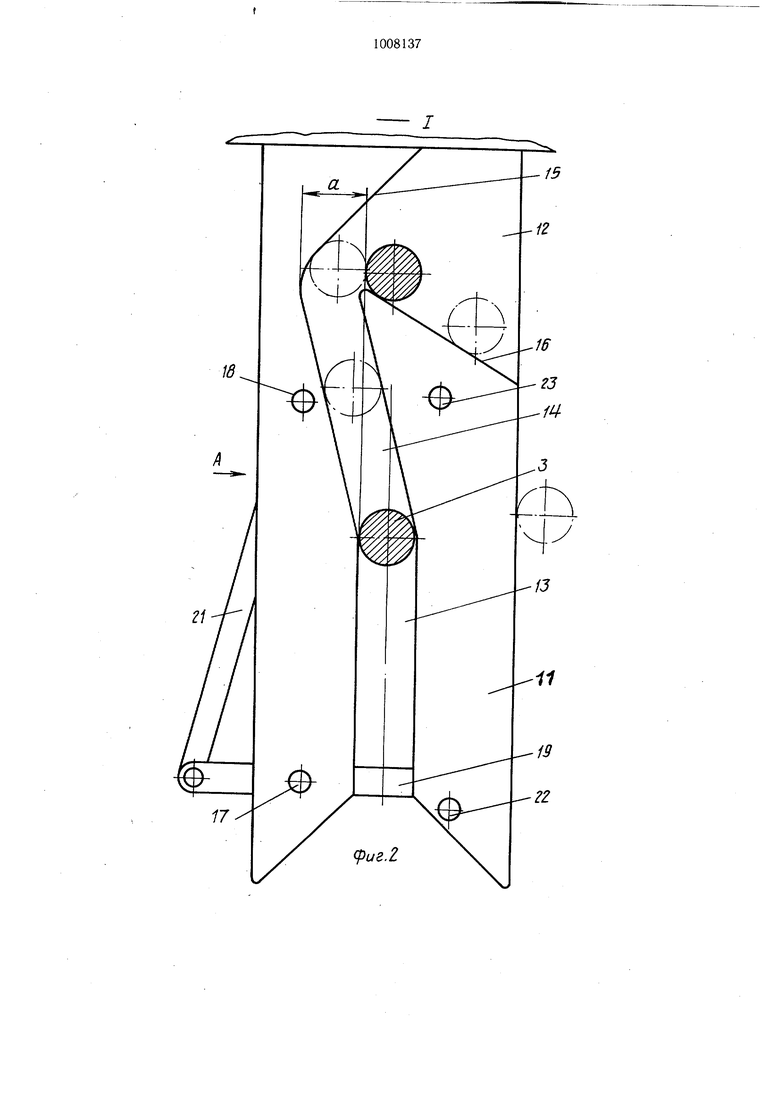
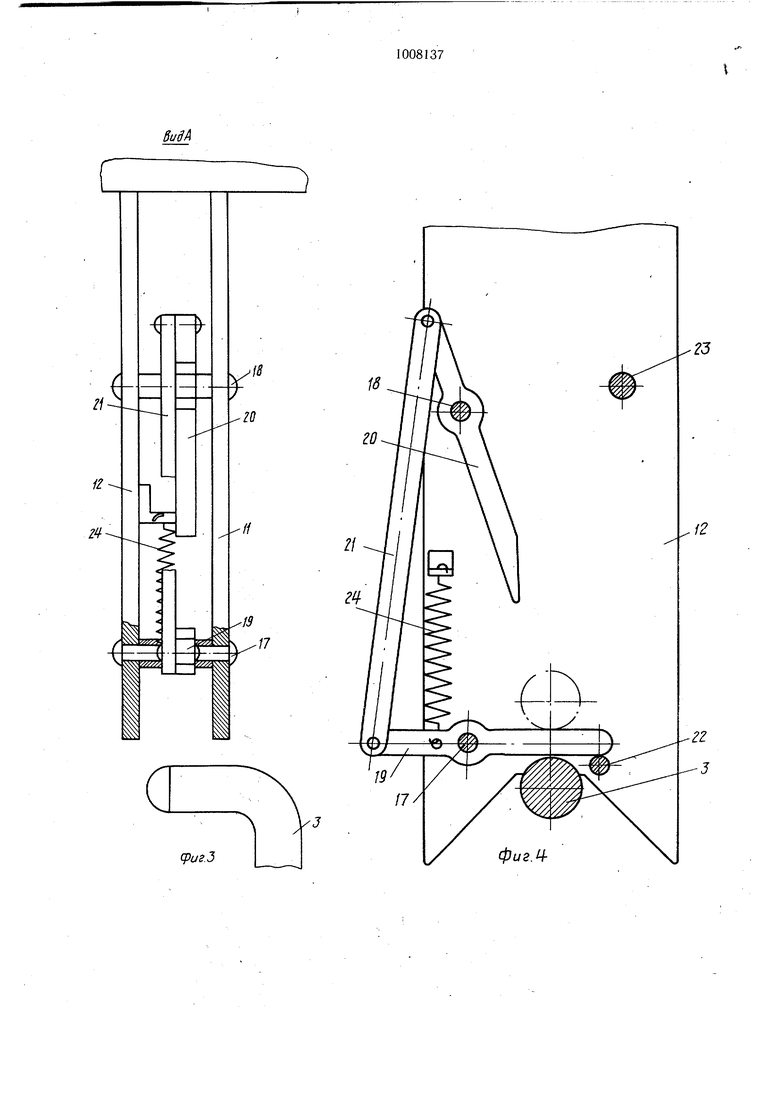
На фиг. 1 изображен клещевой захват в исходном положении, общий вид; на фиг. 2 - узел I на фиг. 1; на фиг. 3 - вид А на фиг. 2; на фиг. 4 - механизм
фиксации клещевин в раскрытом положении в момент захода пальца скобы в паз стойки; на фиг. 5 - механизм фиксации в момент прохождения пальца скобы по вертикальному пазу; на фиг. 6 - механизм фиксации раскрытого фиксированного положения клещевин; на фиг. 7 - узел И на фиг. 1.
Клещевой захват содержит щарнирно соединенные между собой клещевины 1 и механизм фиксации клещевин в раскрытом
5 положении, включающий в себя поворотный стержень 2 с пальцем 3, щарнирно установленную на раме 4 и удерживаемую в вертикальном положении посредством пру.жин 5 и 6, взаимодействующих с винтами 7, установленных свободно в отверстии кронщ0 теинов 8 и регулирующих натяжение пружин 5 и 6 с помощью гаек 9 и закрепленную на траверсе 10 стойку, выполненную из двух щек передней 11 и задней 12. В передней Щеке 11 выполнен паз, имеющий вертикальный участок 13 и наклонный участок 14,
5 смещенный от вертикального на величину а больщую чем диаметр пальца 3 стержня 2 и направляющие скосы 15 и 16, расположенные относительно вертикального участка 13
под углом 45° и относительно друг друга под углом 90°. На щеках шарнирно закреплены посредством осей 17 и 18 и расположены одна на другой нижняя 19 и верхняя 20; защелки, щарнирно соединенные между сдобой посредством жесткой тяги 21 и взаимодействующие с закрепленными на щековинах упорами .22 и 23 и с пальцем 3 стержня 2. При этом длина верхней защелки 20 больще нижней 19 на величину диаметра пальца 3 стержня 2, а защелка 19 связана с пружиной 24. Клещевины 1 соединены тягами 25 с траверсой 10.
Клещевой захват работает следующим образом.
При опускании клещевого захвата на груз, его рама 4 начинает касаться груза, параллелограммная подвеска захвата под действием собственного веса складывается и вместе с ней начинают опускаться щеки 11 и 12 совместно с защелками 19 и 20. При движении по вертикальному участку 13 палец 3 стержня 2 попадает на участок 14 и стержень 2 вместе с пальцем 3 отклоняется от вертикали на величину а больщую чем диаметр пальца 3, при этом пружина 5 сжимается, а пружина 6 растягивается. При дальнейщем движении пальца 3 по участку 14, он попадает на скос 15 и пружина 6 возвращает стержень 2 с пальцем 3 в вертикальное положение, а палец 3 попадает при этом на скос 16 и выходит из фиксатора (фиг. 2). В этом положении клещевой захват производит захват груза и перенос его в нужном направлении.
При касании грузом опоры параллелограммная подвеска захвата начинает складываться, и палец 3 стержня 2 попадает в вертикальный участок 13 паза (фиг. 4), отклоняет вверх нижнюю защелку 19, растягивая пружину 24, а верхняя защелка 20
отклоняется также вверх за счет тяги 21 до упора 23.
Отклонив полностью защелку 19 и пройдя ее, палец 3 стержня 2 попадает в зону
действия двух защелок 19 и 20 (фиг. 5) В данном положении, при дальнейщем складывании параллелограммной подвески, палец 3 стержня 2 упирается в защелку 20 (фиг. 6), так как длина верхней защелки больше длины нижней, и при освобождении
нижней защелки 19 пальцем 3 стержня 2, она будет возвращаться пружиной 24 в первоначальное положение и увлекать за собой при помощи тяги 21 верхнюю защелку 20. Движения защелок 19 и 20 в этом положении показаны радиусами со стрелками поворота относительно их осей (фиг. 5) двигаясь вверх, палец 3 стержня 2 удерживается защелкой 20, тем самым точно фиксируется акт раскрытия клещевого захвата (фиг. 6).
Освободившись от груза, клещевой захват начинает подниматься вверх, паралле.лограммная подвеска растягивается, стержень 2 с пальцем 3 начинает опускаться вниз, освобождает верхнюю защелку 20, тем самым пружина 24 сжимается, возвращая защелку 19 в закрытое положение до упора 22. Палец 3 стержня 2 опускается на защелку 19 и весь захват в раскрытом положении переносится в нужную точку работы. В дальнейшем цикл работы клещевого захвата повторяется.
В конструкции предлагаемого грузозахватного устройства за счет смещения паза на величину большую, чем диаметр пальца грузового стержня и установки грузового стержня на двух пружинах, исключается
несрабатывание клещевого захвата из-за непопадания пальца стержня на нижний скос паза, что повышает надежность его работы.
18
риг.З
гъ
MnffSepfft/ma
| название | год | авторы | номер документа |
|---|---|---|---|
| Клещевой захват | 1980 |
|
SU910525A1 |
| Механизм фиксации грузозахватного устройства | 1982 |
|
SU1074804A1 |
| Автоматический клещевой захват для штучных грузов | 1980 |
|
SU874573A1 |
| Автоматическое устройство к грузозахватному органу | 1980 |
|
SU918243A1 |
| Механизм для фиксации рабочих органов захватного устройства | 1983 |
|
SU1191414A1 |
| Автоматическое устройство к грузозахватному органу | 1982 |
|
SU1093679A2 |
| Клещевой захват | 1982 |
|
SU1054272A1 |
| Захват клещевой | 1973 |
|
SU486993A1 |
| КЛЕЩЕВОЙ ЗАХВАТ | 1968 |
|
SU208228A1 |
| Автоматический захват инженера И.В.Илыка | 1979 |
|
SU908733A1 |


КЛЕЩЕВОЙ 3.4ХВАТ, содержащий раму с шарнирно закрепленными на ней к тешевинами, соединенными посредством тяг с навешиваемой на крюк грузоподъемной машины траверсой, и механизм фиксации клещевин .в раскрытом положении, включающий в себя шарнирно закрепленный на раме и подпружиненный с одной стороны относительно шарнира его закрепления стержень с пальцем, смонтированную на траверсе стойку, выполненную из двух щек, одна из которых имеет паз с вертикальным участком и расположенные под углом. 45° относительно него и под углом 90° относительно друг друга направляющие скосы и щарнирно закрепленные на щеках одна над другой защелки, шарнирно связанные между собой жесткой тягой и установленные с возможностью взаимодействия с пальцем стержня и с закрепленными по крайней мере одной из uieK упорами, отличающийся тем, что, с целью повышения надежности работы, цаз между вертикальным участком и направляюи.1ими скосами выполнен с наклоном в противоположную от последних сторону и с6 § смещением его оси относительно оси вертикального участка на величину, большую (Л чем диаметр поперечного сечения пальца стержня, при этом последний дополнительно подпружинен с другой стороны шарнира соединения его с рамой. .. 00 САд 
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Измеритель концентрации ионов в растворе соли переходного металла | 1984 |
|
SU1224694A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР по заявке № 2927714/11, кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
