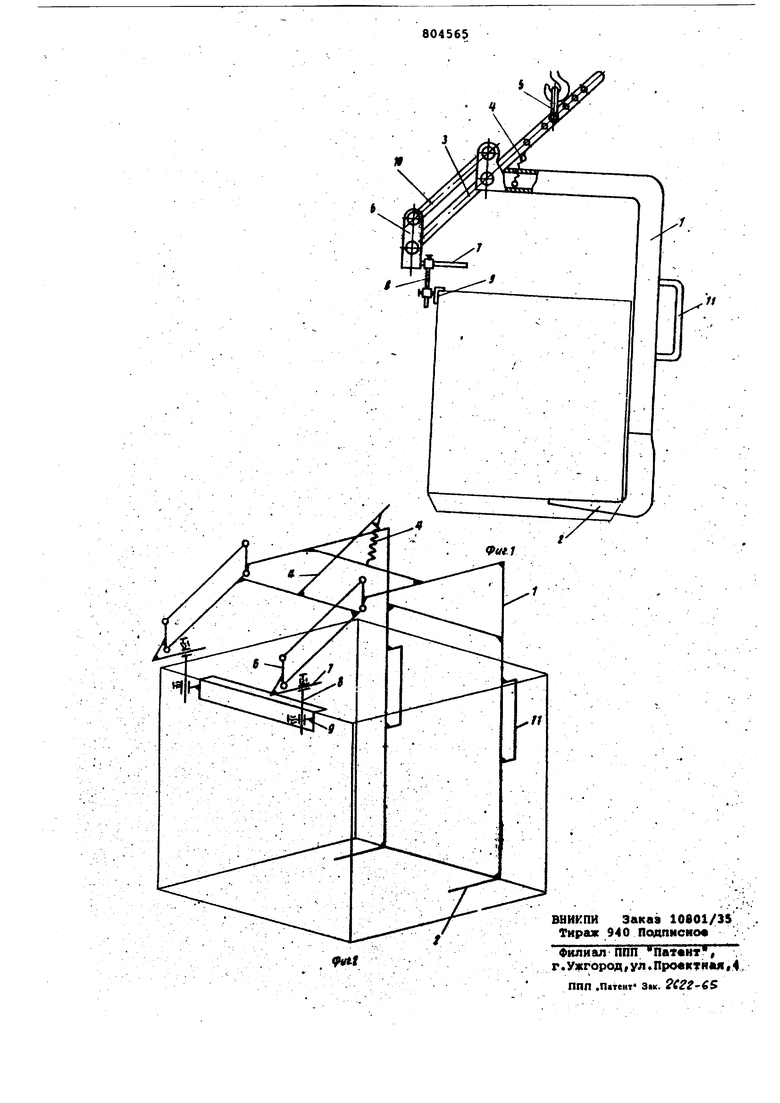
Г . . Изобретение относится к подъемно транспортному оборудованию, а именно к. вилочным, захватам для штучных грузов. . . Известен вилочный захват для шту ных грузов, содержащий Г-образиую траверсу с вилочными.подхватами и прижимное приспособление, включающее в себя шарнирно закрепленный в верхней части траверсы подпружи- . ненный двуплечий рычаг, на одном плече которого расположена петля для навинчивания на крюк грузоподъе ного механизма, а на втором - рифленый упор для предотвращения выпадания груза с вилочных подхва-тов l.. Недостатком даниого устройства является малый диапазон размеров зaxвaтывae югo груза. . Цель изобре.тетия - повышение ег производительности аа счет расшире ния диапазона размеров эахватываем гр груза . Указанная цель достигается тем, что зажимное приспособление снавжено кронштейном с горизонтальной направляющей, шарнирио закрепленнь|м на конце упомянутого второго плеча рычага, и вертикальной напра лякадей, установленной.с возможностью перемещения и фиксации на горизон-. тальной направляющей и несущей упомянутый рифле«ый. упор, установленный на ней также свозможностью перемещения и фиксации, при этом кронштейн соединен с верхней частью траверсы тягой, образующей со вторым плечом упомянутого рычага, кррнштей-. ном и верхней частью траверсы шарнирный параллелограмм. На фигД показан внлочный захват для штучных грузов на фиг.2 - кинематическая схема вилочного захвата. Вилочный захват содержит Г-образную траверсу 1 с вилочными подхватами 2 н прижимное приспособление,включанщее в себя двуплечий рычаг 3, шарннрно закрепленный в верхней.части траверсы 1 н подпружиненного пружиной 4. На одном плече рычага 3 за-креплена переставная петля 5 для навешивания на крюк грузоподъемного механизма, а на другом - кронштейн б, на котором жестко закреплена горизонтальная направляющая 7. На направляющей 7 с возможностью перемещения и фиксации установлена вертикальная направляющая В. На направляющей 8 также с возможностью
перемещения и фиксации установлен рифленый упор 9. При этом кронштейн 6 соединен с верхней частью траверсы 1 тягой 10, обраэуквдей со вторым
плечом рычага 3, кронштейном 6 и верхней частью траверсы 1 шарнирный параллелограмм. А на вилочных подхватах закреплены рукоятки 11.
Устройство работает следующим образом.
Вилочный захват навешивают петлей 5 на крюк грузоподъемного механизма. При этом рычаг 3 удерживается в раскрытом сбстоянии пружиной 4 и заводят подхваты 2 под груз с помощыо рукояток 11. При последующем подъеме пружина 4 под действием веса груза растягивается и рычаг 3, пе-. ремещаясь, фиксирует упором 9 груз на подхватах 2, при этом за счет тяги 10 упор 9 осуществляет плоскопараллельное перемещение, что позволяет использовать вилочный захват в стесненных УСЛОВИЯХ.
Освобождение устройства от груза
существляется в обратном порядке.
При .необходимости переналадки устройства на другой габарит груза
перемещают по направляющей
8 и фиксируют в нужном положении, а направляющую 8 перемещают по направляющей 7 с последующей фиксацией.
Формула изобретения Вилочный захват-для штучных грузов, содержащий Г-обраэну траверсу с вилочными подхватами и прижимное приспособление, включающее в себя шарнирно закрепленный в верхней части траверсы подпружиненный двуплечий рычаг, на одном плече которого расположена петля для навешивания на крюк грузоподъемного механизма, а на втором - рифленый упор для предотвращения выпадания груза с вилочных подхватов, о т л и ч аю щ н и с я тем, что, с целью повышения его производительности за счет расцшрения диапазона размеров захватываемого, груза,. зажимное при-
способлениё снабжено кронштейном с горизонтальной направляющей, шарнирно закрепленным на конце упомянутого второго п/юча рычага и вертикальной напрааляшцей, установленной с возможностью перемещения и фиксации по горизонтальной направляющей
и нвсуцеы упомянутый рифленый упор,
установленный на ней также с воз|« жностыв п« эемецения и фиксации,
при этом кронштейн соединён с верхней частью траверсы тягой, образуюue t со вторым плечом упомянутого рычага, кронштейном и верхней частью траверсы шарнирный параллелограмм.
Источники информации, принятые во внимание при экспертизе
. 1, Авторское свидетельство СССР I 464516, ил. В 66 С i/22, 1972, (прототип), V
| название | год | авторы | номер документа |
|---|---|---|---|
| Вилочный захват для штучных грузов | 1978 |
|
SU835925A1 |
| Устройство для захвата штучных грузов | 1985 |
|
SU1346560A1 |
| Захватное устройство для ящиков | 1972 |
|
SU464516A1 |
| Захватное устройство для штучных грузов | 1989 |
|
SU1765096A1 |
| Вилочный захват | 1988 |
|
SU1723005A1 |
| Грузозахватное устройство | 1983 |
|
SU1118600A1 |
| Захватное устройство для штучных грузов | 1981 |
|
SU1065325A1 |
| Грузозахватное устройство для железнодорожных звеньев | 1990 |
|
SU1729999A1 |
| Грузозахватное устройство | 1990 |
|
SU1744034A1 |
| Захватное устройство для ступенчатых цилиндрических грузов | 1990 |
|
SU1766823A1 |