Изобретеиие относится к области трансиортного машииостроеиия, в частности к рулевым управлениям транспортных средств со всеми управляемыми колесами.
Известны рулевые управления транспортных средств со всеми управляемыми колесами, содержащие орган управления, рулевой .анизм и рулевой привод с гидравлическим хсплением. Педостатком упомяпутых рулевых управлении является налпчие нескольких органов управления поворотом колес, что в сочетании с управлением другими механизмами, установленными на транспортном средстве, например грузоподъемными, усложняет функции оператора н делает неудобной эксилуатацию подобных транспортных средств.
Для повышения удобсгва управления, согласно изобретению, рулевой привод выиолнен в виде кривошинно-шатуппых механизмов, в которых кривошипы установлены на выходном валу рулевого механизма, а продолженные за точку прнсоеднпения кривой пиов концы шатунов шарнирно соединены с помощью новодков с промежуточными рычагами, связанными тягами с клапанами уиравления гидроцилиндров усилителей соответственно передпих и задних колес. Кроме того, орган управления выполнен в виде рукоятки, шарнирно установленной на входном валу рулевого механизма и снабженной щтифтом, перемешающнмся в концентричном оси ру.тевон рукояткн иазе с выстуиамп. соответствующими нродольиому и поперечному дв :женням транспортного средства, а также его развороту на месте.
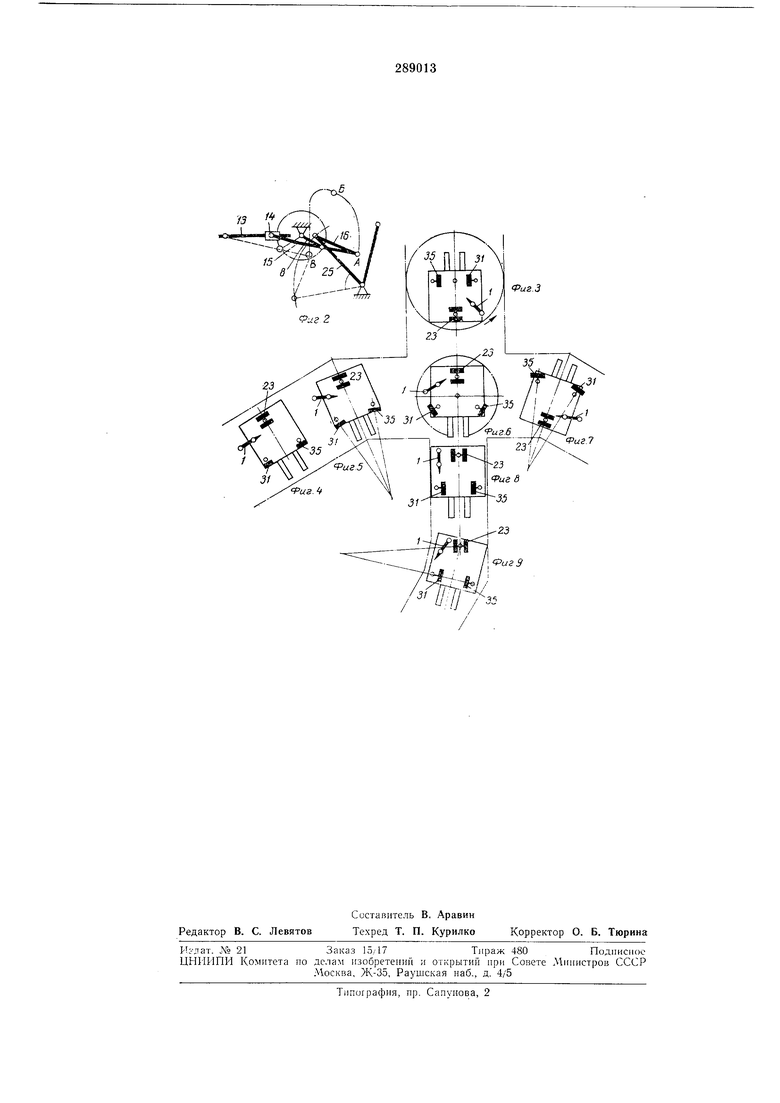
Па фиг. 1 изображена схема рулевого управления; на фиг. 2 - кинематическая схема крнвошппно-щатунного механизма; на фиг. 3 - положение колес у рулевой рукоятки при развороте на месте с мгновенным центром поворота, лежащим иосередине между персдними колесами; на фиг. 4 - го же, при поперечном движенин; на фиг. 5 - то же, поворот при поперечном движеннн с предлежащпм иентром новорота; на фнг. 6 - то же, нрп развороте на месте в круге, онисызак1П1,ем контур транспортного средства; на фиг. 7 -то же, новорот при поперечном движеннн с центром поворота, лежащнм сзади; на фиг.
8
- то же, ири продольном движении; на фиг. 9 - то же. поворот вправо прп продольном движеннн.
Рулевая рукоятка / шарнпрно закреплена в вилке осн 2 рулевой колонки н С11аожена штифтом 3, скользящим в пазе 4. Ось 2 связана с помощью состоящего из цплиндрических шестерен 5-7 рулевого механнзма с осью кривошипов 8, которая соедпнена с кривошинно-шатуннымн механизмами, состоящими соответственно из звеньев 9-12 п
13-16. Шатун 10 поводком 11 связан с коромыслом 17, которое нрпводит в действие через тягу 18 шток кланана 19 управления. Последний управляет гидроцилиндром усилителя 20, взаимодействующим с рычагом 21, установленным но оси 22 иозорота задних колес 23. Ось колес 23 шариирио соединена с балансирной вилкой 24.
Шатун 15 новодком 16 связан с коромыслом 25, которое ириводит в действие через тягу 26 шток клапана 27 унравлепия. Последний управляет гидроцилиндром усилителя 28. взацмодействуюгцим с рычагом 29, установленным на оси 30 поворота переднего правого (по ходу) колеса 31. Кроме того, рычаг 29 соединен с помощью поперечной тяги 32 с поворотным рычагом 33, установленным на оси 34 переднего левого колеса 35. Передние колеса выполнены ведущими ц оборудованы тяговыми электродвигателями 36 и 37 и колеснымн редукторами 38 и 39. Рычап; 29, 33 и тяга 32 образуют антппараллелограмм, поворачивающий колеса в противоположные стороны, как это требуется при поперечном движении.
Кривощипно-щатунные механпзмы работают следуюпдпм образом. При повороте крпвошина 8 (см. фиг. 2) против часовой стрелки из положения А в положение В щарпир, соединяющий звенья 15 и 16, описывает шатунную кривую, показанную на чертеже штрихпунктнро.м. Параметры механизма таковы, что на участке А-Б кривая мало отличается от окружности, радиус которой равен длине поводка 16. Начальное положение коромысла 25 выбрано таким образом, что упомянутый щарнир расположен в центре упомянутой окружности. В результате, перемещение щарнира на участке А-Б практически не приводит к смещению коромысла 25. На участке Б-В шатунная кривая постепенно начинает отличаться от окружности, что приводит к смещению коромысла.
Второй кривошиино-шатунный механизм работает аналогично первому. Разница состоит лищь в порядке следования положений. Положение А нервого механизма соответствует положению В второго, положения Б совпадают, а положение В нервого механизма соответствует положению А второго.
Поскольку крнвощииы обоих механизмов жестко связаны одной осью, а их крайние положения взаимно обратны, в первой половине угла поворота крнвощипа 8 перемещается коромысло 17, а коромысло 25 остается неподвижным. Во второй половине угла перемещается коромысло 25, а коромысло /7 остается неподвижным.
Благодаря рулевому мехаиизму за иеполный оборот рукоятки / лгожет быть обеспечено управление продольным и иоиеречным движениями транспортного с|5едства, а также его разворот на месте. При этом управлеиие продольным движением обеспечивается поворотом рукоятки / в иределах ±45° от продольной оси трансиортного средства, а управлеппе поперечным движением - поворотом рукоягки / в пределах ±45° от его лоиеречпой осп. Установка рукоятки в среднее между упомянутыми осями положение обеспечивает поворот траиспортного средства па месте.
При режиме продольного двпжепия действует механизм со звеньями 9-}2, а коромысло 25 механизма со звеньями 13-16 остается
неподвижиым. В результате, поворот рукоятки ириводит к смещению золотника клапаиа 75 управлеиия и включеипю гидроцплиндра усилителя 20, поворачивающего задние колеса 23. Параметры привода выбраны такими,
что ири расположении рукоятки по продол ной оси транспортного средства плоскости вращения управляемых колес параллельп 1 продольной осн, 410 обеспечивает нродольпое прямолинейное движеиие. Повороту рукоятки
против часовой стрелки на 45° соответствует поворот колес 23 на 90° по часовой стрелке (см. фиг. 3). В этом случае ipn обеспечепии реверсирования одного из тяговых двигателей 36 и 37 иередиих колес транспортное средсгво
поворачивается на месте, гак как все колеса могут обкатываться вокруг с ;1едней между передними колесами точки. Реверсирование двигателя может быть ВЫПОЛНС 1О при ЮМОЩИ
автоматической блокировки с осью .a заднего колеса.
Дальнейщий поворот рукоятки против часовой стрелки переводит рулевое управлеппе в режим поперечного движеиия. Ко/геса 23
остаются развернутыми на 90° по отн.ошению к продольной оси транспортного средегва. так как коромысло 17 кривощипно-шатунного мехаппзма со звеиьями . остается неподвижным. В то же время начинает действсвагь
механизм со звеньями 13-16, который перемещает коромысло 25, CMeniajouiee. в свою очередь, золотник клапана 27, обеспечивая включение гидроцилиндра усплителя 28. Колеса 5/ и 35 поворачиваются на рав1-:ый угол
в противоположные стороны, а точка пересечения осей всех колес всегда лежит на иродольной оси траиспортного средства. Меняя угловое положение передних колес, .можно пере.мещать точку пересеченпя осей вдоль продольной оси, т. е. меиять радиус поворота прп поперечном двпжении. При поперечном движении по дуге с предлежащим цептром поворота (см. фиг. 5) колеса 31, 35 слегка повернуты внутрь. На фиг. 7 колеса иовернуты иаружу и цеитр дуги движеиия лежит сзади транспортного средства. Дальпейши.м поворотом колес в том же направлении можно совместить цеитр поворота с центром окружпостп, описанной вокруг контура транспортпого
средства (см. ()иг. 6), что обеспечивает разьорот иа .месте с минимальным раднусом.
жимах, изображенных на фиг. 3-9. Однако имеются три наиболее уиотребптельных режнма движения: прямолинейное иродольное (см. qbjir. 8), прямолинейное поперечиое (см. фнг. 4) и разворот иа месте (см. фиг. 3). С эксплуатационной точки зреиня удобно, чтобы к этим видам движения оиератор мог подготовиться заранее до начала иере.мещеиия. В oпиcывaeJMOM рулевом уиравлении уже предусмотрено соответствие между направлением движеиия и ноложением рукоятки. Кроме того, для иовышення удобства эксплуатации рукоятка укреплена на оси 2 в вилке и может перемещаться в вертикальной илоскости. Передний конец рукоятки снабжен mTiicj)том 3, который входит в паз 4 наиравляющей, установленной концентричио оси 2. Паз 4 имеет выстуиы, соответствующие нродольиому и иоиеречному движениям транспортного средства и его развороту иа месте. При иовороте рукоятка иокачивается в пределах, заданных назом, достигая через каждые 45° крайнего верхнего нли крайнего нижнего положения, что дает возможность оператору неггосредствеиио воспринимать начало упомянутых режимов движеиия.
3d
31
Предмет изобретения
1.Рулевое управление транспортного средства со всеми управляемыми колесами, содержащее орган управления, рулевой механизм и рулевой иривод с гидравлическим yciiлепием, отличающееся тем, что. с целью повыщення удобства уиравлення, рулевоГ привод вынолиен Б виде кривощипио-шатуипых механнзмов, в которых кривощипы устаиовлешл на выходном валу рулевого механизма, а иродолжеиные за точку нрисоедииеиия кривошипов концы щатунов шариирио соединены с помощью поводков с промежуточными рычагами, связаиными тягами с клапанами yriргвления гндроцилиндров усилителей соответствеиио передних и задних колес.
2.Рулевое управленпе по п. I. отличаюгцееся тем, что орган управления выполнен в Biiде рукоятки, щарнирно установленной на входном валу рулевого механнз.ма и снабженной щтифтом, перемещающимся в коицеитричпом оси рукоятки иазе с выст памп, соответствующими продольному и ноперечному двпжениям транспортного средства, а также его развороту иа месте.
2/
13

| название | год | авторы | номер документа |
|---|---|---|---|
| ОДНОКОЛЕЙНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1993 |
|
RU2087369C1 |
| ТЯГОВОЕ ТРАНСПОРТНОЕ СРЕДСТВО (ВАРИАНТЫ) | 1999 |
|
RU2163209C1 |
| РУЛЕВОЙ МЕХАНИЗМ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2271954C1 |
| Транспортное средство для работы на склонах | 1982 |
|
SU1133126A1 |
| Веломобиль | 1986 |
|
SU1406024A1 |
| Механизм управления поворотом транспортного средства | 1983 |
|
SU1087402A1 |
| Устройство для автоматического управления сельскохозяйственным агрегатом | 1983 |
|
SU1144639A1 |
| Ходовая часть грузоподъемного средства | 1981 |
|
SU992395A1 |
| МЕХАНИЗМ (ВАРИАНТЫ) И СПОСОБ ИДЕНТИЧНОГО РУЛЕВОГО УПРАВЛЕНИЯ ТРАПЕЦИЕВИДНЫМ КАЧАЮЩИМСЯ РЫЧАГОМ С РАДИАЛЬНОЙ ТЯГОЙ И МНОГОКОЛЕСНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2020 |
|
RU2760795C1 |
| ИНВАЛИДНАЯ КОЛЯСКА С ЭЛЕКТРОМЕХАНИЧЕСКИМ ПРИВОДОМ | 1991 |
|
RU2085166C1 |