Изобретение относится к автрматизации управления мобильными агрегатами.
Известно устройство для автоматическаго управления агрегатом, работающим в междурядьях растений, содержащее щуп, гидрораспределитель с управляющим клапаном и исполнительный гидроцилиндр, кинематическое средство, связывающее щуп и гидрораспределитель 1.
Известно также устройство для автоматического управления сельскохозяйственным агрегатом, содержащее раму, щуп, выполненный в виде лыжи, установленной на параллелограммном механизме, имеющем два щатуна и связующее звено, и установленный на раме агрегата гидрораспределитель системы управления, щток которого кинематически связан, со щупом 2.
Однако после отработки возмущающего сигнала управляемые колеса агрегата не становятся параллельно новому направлению ряда, а возвращаются в нейтральное положение - параллельно продольной оси агрегата. Из-за этого устройства отрабатывают сигнал от каждого дерева и каждый раз возвращают колеса в исходное положение, что усложняет процесс управления, уменьшает его точность и быстродействие.
Цель изобретения - увеличение точности и быстродействия управления путем уменьшения количества управляющих воздействий.
Указанная цель достигается тем, что в устройстве для автоматического управления сельскохозяйственным агрегатом, содержащем раму, щуп, выполненный в виде лыжи, установленной на параллелограммном механизме, имеющем два шатуна и связующее звено, и установленный на раме агрегата гидрораспределитель системы управления, шток которого кинематически связан со щупом, параллелограммный механизм одним из своих шатунов и связующим звеном соединен с рамой агрегата одним шарниром, причем связующее звено выполнено в виде двуплечего рычага с осью поворота на втором шатуне, и второй конец двуплечего рычага щарнирно связан через тягу с одним из концов коромысла, щарнирно установленного на щтоке гидрораспределителя, а другой конец коромысла второй тягой шарнирно связан с рычаго1и, жестко закрепленным на первом шатуне и установленным на шарнире крепления параллелограмного механизма к раме агрегата, на котором также установлен один конец второго рычага, жестко закрепленного на первом шатуне, а второй его конец связан посредством пружины с рамой агрегата.
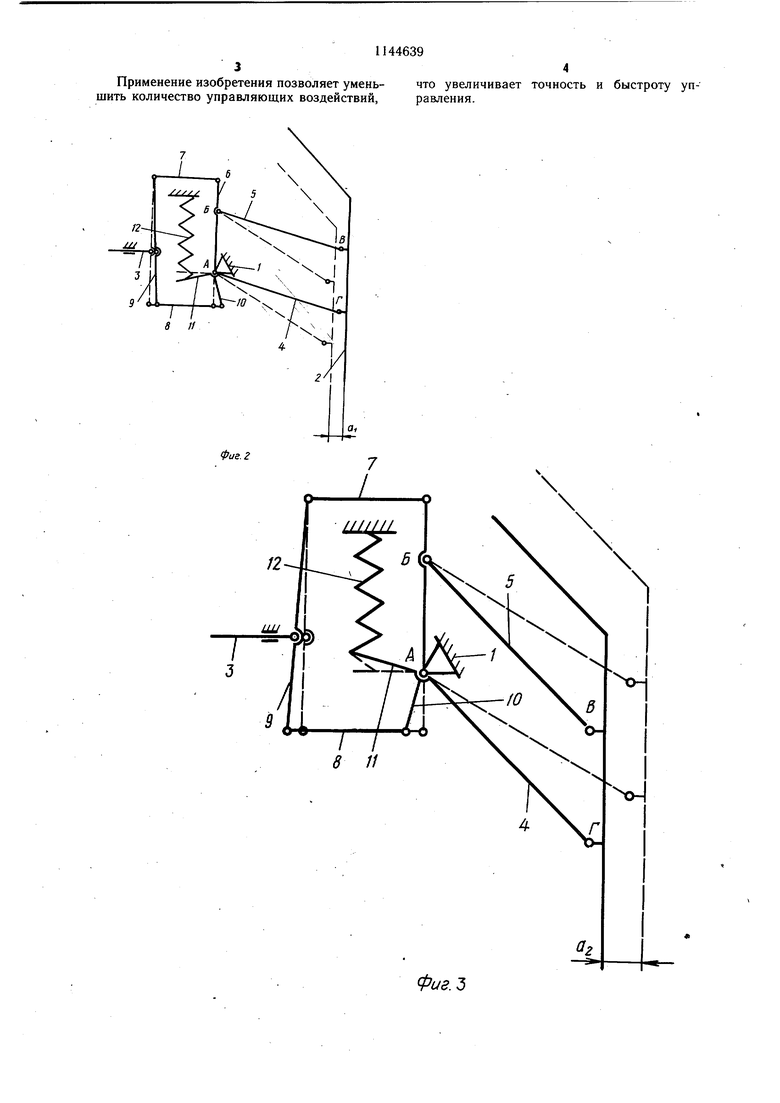
На фиг. 1 схематично показано устройство для автоматического управления сельскохозяйственным агрегатом; на фиг. 2 - положение устройства в случае, когда ось
ряда растений параллельна направлению движения агрегата, а расстояние между мащиной и рядом растений увеличилось на на фиг. 3 - то же, когда расстояние между, машиной и рядом растений уменьшилось
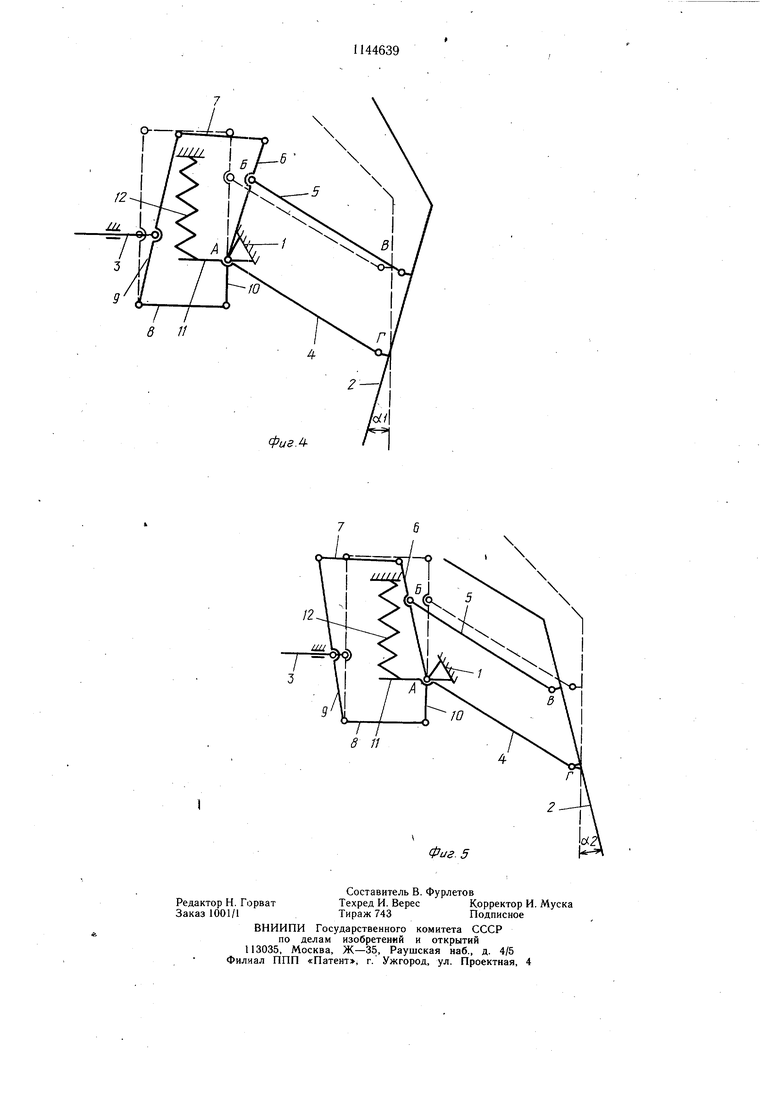
на at;Ha фиг. 4 - то же, когда расстояние от мащины до ряда не изменилось, а ось ряда расстений отклонилась на угол otj; на фиг. 5 - то же, когда ось ряда растений отклонилась в другую сторону на угол otg.
0 Устройство для автоматического управления сельскохозяйственным агрегатом монтируется на раму 1 агрегата и содержит щуп 2 выполненный в виде лыжи, который кинематически связан со щтоком 3 гидрораспределителя системы управления (последнее не показано). Кинематическая связь осуществлена посредством щатунов 4 и 5, двуплечего рычага б, тяг 7 и 8, коромысла 9, рычагов 10 и 11, жестко закрепленных на шатуне 4. Свободный конец рычага 11 связан с рамой 1 пружиной 12. Щуп 2, шатуны 5 и 4, рычаг 6 образуют параллелограммный механизм с шарнирными вершинами А, Б, В, Г.
Устройство работает следующим образом. При движении агрегата по стрелке V щуп 2 скользит по копируемой поверхности (ряду растений), прижимаемый к ней пружиной 12. При изменении направления ряда растения (рис. 4 и 5) щуп 2, следуя его кривизне, поворачивается вокруг точки Г на
0 некоторый угол. При этом расстояние от машины до точки Г, а значит и до ряда растений, остается неизменным. Соответствующий сигнал об угле поворота щупа 2 через шатун 5, рычаг 6, тягу 7, коромысло 9 и шток 3 передается на гидрораспределитель
5 системы управления, которая поворачивает управляемые колеса на такой же угол (коэффициент передачи кинематической цепи от щупа до направляющих колес должен быть равным единице). В этом случае машина двигается на заданном расстоянии от ряда параллельно его новому направлению. Когда в силу каких-либо причин (например, смещения агрегата) изменяется расстояние от мащины до ряда (рис. 2 и 3), а следовательно, и ст мащины до точки Г,
5 тогда щатун 4 поворачивается относительно точки А на некотор 1Й угол и этот сигнал через рычаг 10, тягу 8, коромысло 9и штокЗ передается на гидрораспределитель системы управления, которая поворачивает управляеQ мые колеса в нужную сторону. После того, как между мащиной и рядом установится заданное расстояние, колеса поворачиваются в исходное положение.
При одновременном изменении направления ряда и расстояния от машины до ряда
5 эти сигналы складываются при помощи коромысла 9 и автоматическая система отраг батывает результирующий сигнал. 34
Применение изобретения позволяет умень- что увеличивает точность и быстроту упшить количество управляющих воздействий,равления.
1144639
фиг. г
фиг.Ъ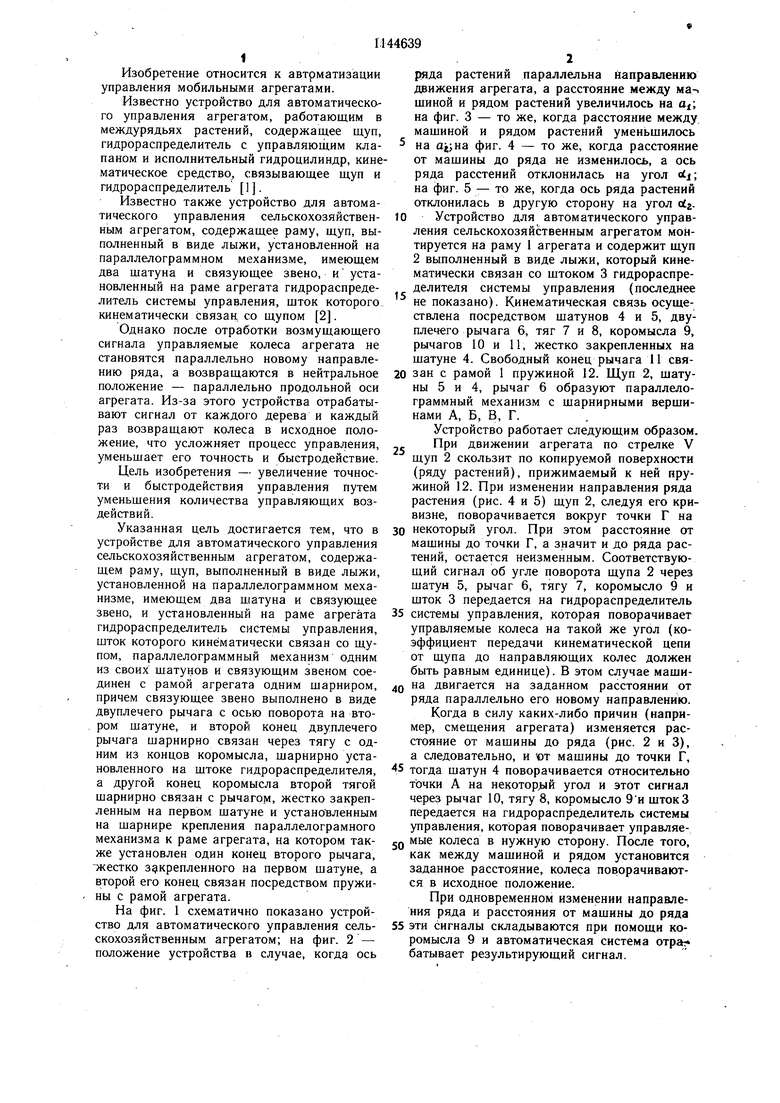
| название | год | авторы | номер документа |
|---|---|---|---|
| Уплотняющий механизм | 1981 |
|
SU950239A1 |
| Прицепной пресс высокого давления к пресс-подборщикам льна низкого давления | 1981 |
|
SU990119A2 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ПОЧВЫ В РЯДАХ МНОГОЛЕТНИХ НАСАЖДЕНИЙ | 2008 |
|
RU2357390C1 |
| Устройство для обработки межствольных полос в садах | 1982 |
|
SU1064879A1 |
| Машина для посадки на площадках склонов | 1982 |
|
SU1036271A1 |
| МАШИНА ДЛЯ ОБРАБОТКИ ПРИСТВОЛЬНЫХ ПОЛОС В САДУ | 2006 |
|
RU2326516C2 |
| Машина для внесения удобрений в почву | 1982 |
|
SU1029861A1 |
| Устройство для автоматического управления прицепной плодоуборочной машиной | 1988 |
|
SU1570668A1 |
| Следящее устройство режущего аппарата виноградоуборочной машины | 1982 |
|
SU1056951A2 |
| Копирующее устройство для автоматического направления движения сельскохозяйственных машин по рядкам растений | 1983 |
|
SU1142019A1 |
УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННЫМ АГРЕГАТОМ, содержащее раму, щуп, выполненный в виде лыжи, установленной на параллелограмм ном механизме, имеющем два шатуна и связующее звено, и установленный на раме агрегата гидрораспределитель системы управления. шток которого кинематически связан со щупом, отличающееся тем, что, с целью увеличения точности и быстродействия управления путем уменьщения количества управляющих воздействий, параллелограммный механизм одним из своих щатунов и связующим звеном соединен с рамой агрегата одним шарниром, причем связующее звено выполнено в виде двуплечего рычага с осью поворота на втором шатуне, и второй конец двуплечего рычага шарнирно связан через тягу с одним из концов коромысла, щарнирно установленного на щтоке гидрораспределителя, а другой конец коромысла второй тягой щарнирно соединен с рычагом, жестко закрепленным на первом шатуне и установленным на шарнире крепления параллелограмного механизма к раме агрегата, на котором также установлен один конец второго рычага, жестко закрепленного на первом шатуне, а второй его конец связан посредством пружины с рамой агрегата. 4: 4; 05 СО 00
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Агрегат для работы в междурядьяхРАСТЕНий | 1976 |
|
SU820689A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ГИДРАВЛИЧЕСКИЙ МЕХАНИЗМ СЛЕДЯЩЕГО ДЕЙСТВИЯ К ВЫДВИЖНЫМ СЕКЦИЯМ ПОЧВООБРАБАТЫВАЮЩИХОРУДИЙ | 0 |
|
SU307750A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
