Изобретение относится к печатающим механизмам регистрирующих приборов и может быть «епользовано в телеграфных аппаратах и в устройствах вывода информации.
Известные печатающие устройства регистрирующих приборов, содержащие подвижную кйретку с опорными роликамн, дешифрирующие линейки, набор типовых рычагов с тияамд, набор тяг типовых рычагов, механизм привода типовых рычатов и блок управления механизмом привода, сложны в изготовлении и образуют динамическую систему, обладающую недостаточной надежностью и имеющую пониженное бьгстродействие а также повышенный шумовой фон прИ рнтботе.
Целью изобретения является повышение быстродействия и надёжности, а также снижение шумового фона при работе.
Предложенное устройство снабжено элементом гибкой связи между каждым типовым рычагом и тягой этого рычага, причем механизм привода типовых рычагов выполнен в виде двух подвижных суппортов: суппорта разгона типового рычага, действующего на рычаг через элемент гибкой связи и тягу типового рычага, и суппорта манипуляций, взаимодействующего с тягами типовых рычагов; управления -механизмом привода выполней IB виде двух управляющих лвнеек: лийейкй разгоНа и линейки манипуляции и кулачкового валика управления, а нижйи-й из yinoмянутых опорных роликов выполнен профильным и установлен с обеспечением стабилизации положения подвижной каретки в момент взаимодействия линеек управления с суппортами механизма привода.
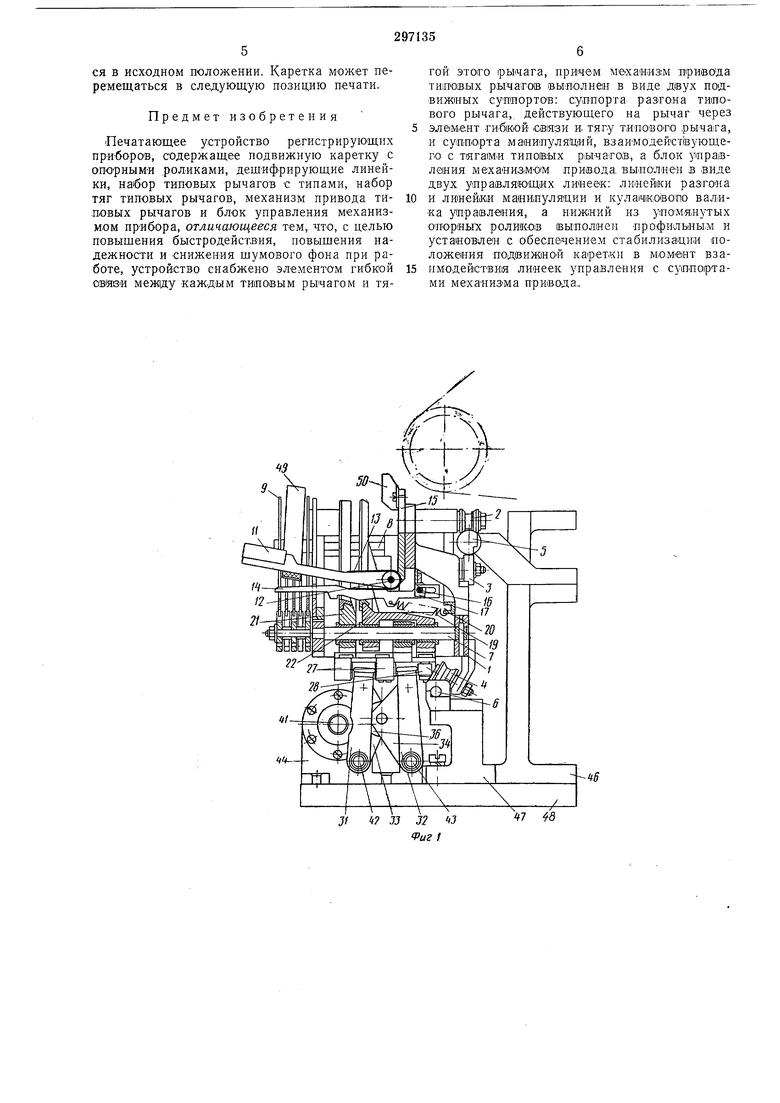
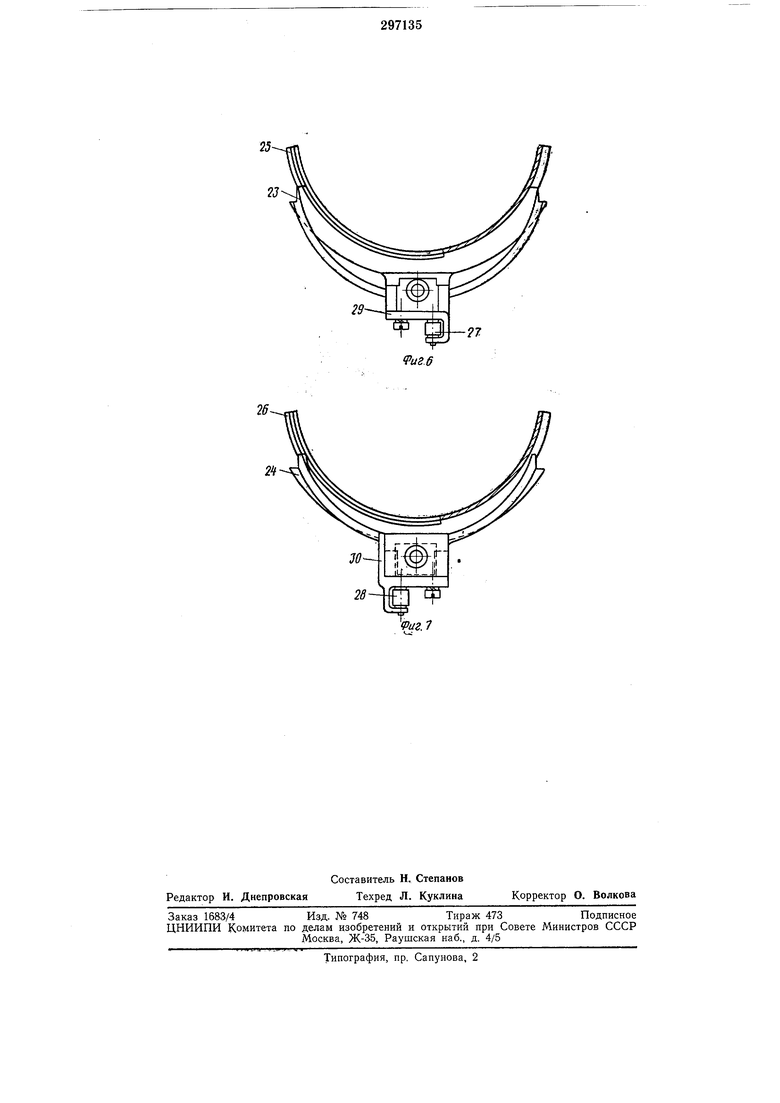
На фиг. 1 схематично изображено предложенное устройство, общий вид; на фиг. 2 - схема соединения типового рычага с тягой тилового рычага; на фиг. 3 и 4 - элементы блока управления, вид сбоку; на фиг. 5 - блок управления; на фиг. 6 и 7 - подвижные суппорты механизма привода. Подвижная KaipeTKa иМбет несущий каркас
/ с опорными 2, поддерживающими 3 и упорным 4 роликамИ; обеспечивающими продольное перемещение каретки по направляющей трубке 5 и опоре 6.
На кронштейнах каркаса установлены направляющая ось 7 и два направляющих стержня 8, на кото-рых установлены дешифрирующие линейки 9. iK корпусу каркаса крепится направляющая гребенка 10.
Комплект типовых рычагов 11 (см. фиг. 1,2)
с ОСЬЮ 12, элементами 13 гибкой связи, тягами 14 типовых рычагов установлен на корпусе корзинки 15, прикрепленном к каркасу. Направляющая ось 16 с помощью скобы 17 и простыни 18 фиксируется на каркасе /. Возс тягой 14, другим закреплены на скобе 0, прикрепленной к каркасу.
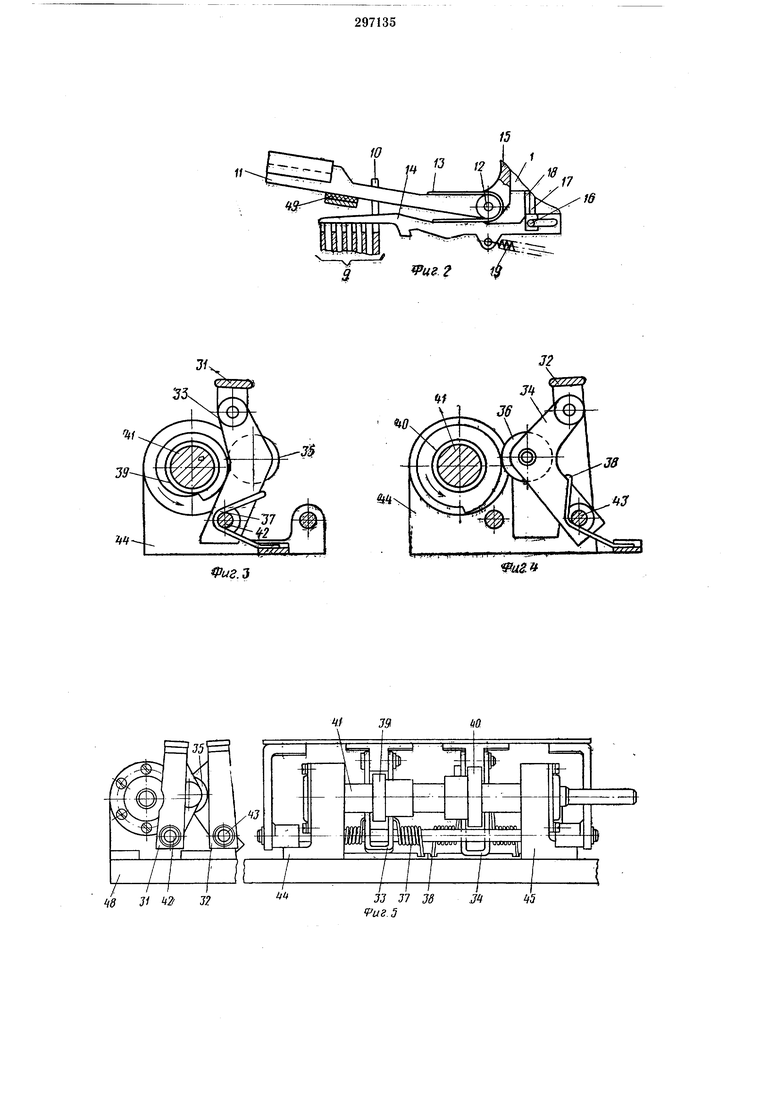
Усил1ие пружины 19 обеспечивает возврат тяг 14 в исходное лоложение и фиксацию их в этом положенИИ. На направляющей оси 7 установлены два ПОДВИЖНЫХ суппорта: суппорт 21 разгона и суппорт 22 манипуляций. Суппорты могут перемещаться параллельно вдоль оси 7, опираясь своими крыльями на сгержни 8. Сувпорты (см. фиг. 6, 7) имеют несущие каркасы 23, 24, выполненные из легкого сплава, рабочие элементы 25, 26 из профилированного прочного материала и упорные ролики 27, 28, установленные на кронщтейнах 29, 30 (попарно под каждым суппортом). Ролики 27, 28 попарно взаимодействуют с расположенными между ними силовыми линейками блока управления (см. -фиг. 3, 4, 5), с линейками 31 разгона (ролики 27) и с яинейК10Й 32 манипуляции (ролики 2S). Линейки 31, 32 через серьги 33, 34 и ролики 35, 36 под воздействием пружины 37 разгона и пружины
38манипуляций взаимодействуют с кулачком
39.разгона (линейка 31) и кулачком 40 манипуляции (линейка 32), установленными на валике управдевия 41. Опорные оси 42, 43 линеек 31, 2 закреплены на стойках 44, 45. Направляющая-. трубка 5 крепится к кронщтейну 46, направляющая опора 6 - к кронщтейну 47. Стойки 44, 45, кронщтейны 46, 47 к,репятся к общей платформе 48.
Каждая тяга 14 типового рычага Имеет по нижней грани рабочий: профиль, в который входят: выступ разгона и манипуляционный выступ с площадкой нейтрального положения и скосом (на чертежах не показ:аны). В исходном положении типовые рычаги 77 покоятся на амортизаторе 49. В момент удара тиловые рычаги стабилизуются улавливателем 50, прикрепленным к корпусу корзинки 15. Привод механизмов устройства на чертежах не показан.
Работа механизма лечати осуществляется в следующей последовательности: в исходном полаженИИ все детали каретки « блока управления неподвижны. Типовые рычаги // покоятся на амортизаторе 49, тяги 14 типовых рычагов своей площадкой исходного положения контактируют с гранью рабочего элемента 26 суппорта 22 манипуляции И находятся в крайнем верхнем положении, усилием пружины 19 тяги Прижимаются к суппорту 22. Поступление соответствующего сигнала приводит к тому, что валик 41 начинает лроворачиваться, а вместе с ним и кулачки 39 и 40. Взаимное положение профилей кулачков 39 и 40 обеспечивает определенную последовательность перемещения линеек 31 и 32. В начале проворачивании я валика 41 ролик 36, описывая профиль кулачка 40, через серьгу 34 начинает перемещать линейку 32 манипуляции вправо, при этом через правый упорный ролик 28 движение передается на суппорт 22, .который также начинает смещаться вправо. В результате смещения вправо суппорта 22
тяги 14 типовых рычагов под действием пружины 19 опускаются до соприкосновения с выступами дешифрирующих ланеек 9.
С этого момента тяги 14 не соприкасаются с суппортом 22. Одновременно с поступлением сигнала начинается перемещение дешифрирующих линеек 9, которые к моменту опускания тяг 14 образуют в соответствии с поступившей ком1бинацией сквозной паз, в который и западает одна из тяг 14. Остальные тяги будут удерживаться выступами линеек 9. С момента западания тяги 14 под действием пружины 37 в соответствии с профилем кулачка
39, по которому переме;щается ролик 55, .начинает смещаться влево и лияейка -31 .разгона, которая через левый улорный ролик 27 будет перемещать влево суппорт 21 разгона. Суппорт 21 передней гранью своего рабочего
элемента 25 входит в соирикосновен-ие с рабочей гранью выступа разгона тяги 14. Это перемещение передается через элемент 13 гибкой связи на типовой рычаг 11, который начинает поворачиваться вокруг оси 12. Общий
рабочий ход суппорта 21 разгоиа обеспечивает поворот типового рычага 11 вокруг оси 12 на угол в 75° дуги окружности. После прекращения смещения суппорта 21 влево типовой рычаг // продолжает свое движение к носителю (бумаге) по инерции. Одновременно с началом смещения суппорта 21 влево суппорт 22 под управлением кулачка 40 усилием пружины 38 смещается влево. Скользя кромкой рабочего элемента 26 по cKiocaM тяг 14, опирающихся на дешифрирующие линейки 9, суппорт приподнимает их и возвращает в исходное состояние. Тяга 14, которая осуществила разгон типового рычага 11, в этот момент занимает крайнее левое лоложение и
воздействию суппорта 22 не подвергается. Еще до полного завершения типовым рычагом 11 своего пути к носителю суппорт 21, увлекаемый кулачком 39, начинает обратный путь вправо. Подобное совмещение фаз возможно благодаря наличию элемента 13 гибкой связи между типовым рычагом 11 и тягой 14. При этом эл-амшт 13 гибкой бвязи позволяет тяге 14 под действием пружины 19 последовать за возвращаю1щимся суппортом 21.
Элемент 13 гибкой связи, обеспечив пролет рычага 11 на пути его от носителя к исходной позиции, выполняет роль возвратной пружины, обеспечивая быстрое возвращение рычага к амортизатору 49. В то же время тяга 14,
продолжая свое перемещение вместе с суппортом 21 вправо, своим скосом надвигается .на ребро рабочего элемента 26 суппорта 22, находящегося в исходном положении. Это приводит к подъему тяги, выводу ее из паза
дешифрирующих линеек 9 и возврату в исходное положение. После выхода тяги 14 из впадин линеек 9 линейки готовы -к набору следующей комбинации. На этом цикл печати заканчивается. Валик управления 41 останався в исходном положении. Каретка перемещаться в следующую позицию печати.
Предмет изобретения
Печатающее устройство регистрирующих при-боров, содержащее подвижную каретку с опОрныМИ роликами, дешиф-рирующие линейки, набор типовых рычагов -с типами, набор тяг типовых рычагов, механизм привода типовых рычагов и блок управления механизмом прибора, отличающееся тем, что, с целью повышения быстродействия, повышения надежности и снижения шумового фона при работе, устройство снабжено элементом гибкой авяеи между каждым типовым рычагом и тягой этого рычага, причем механиз М типовых рычатов вылолнен в виде двух появижиых суппортов: суппорта разгоиа типового рычага,, действующего на рычаг через элемент гИбкой |СВ1Язи и тягу тииово го .рычага, и суппорта ма1НИ пуляций, взаимодейст1вующего с тигам.и типовых рычагов, а блок управления мехаНиз,мо1М привода, выполнен в виде двух управляющих линеек: линейки разгона
и липейки манипуляции и кулачковопо валика управления, а ниж;ний из упомянутых опорных роликов выполнеп профильным и установлен с обеспечением стабилизации положения подвиж1НОй каретки в мо.мент взанмодействия линеек управления с суппортами механизма привода..
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления строкоотливной наборной машиной | 1960 |
|
SU136389A1 |
| УСТРОЙСТВО ДЛЯ ВКЛЮЧЕНИЯ ПРОДОЛЬНЫХ ПОДАЧ ТОКАРНО-ВИНТОРЕЗНОГО СТАНКА | 1971 |
|
SU301226A1 |
| Устройство для полуавтоматического изготовления перфорированной ленты для автоматических наборных машин | 1959 |
|
SU130909A1 |
| Счетная машина | 1934 |
|
SU49498A1 |
| Станок | 1975 |
|
SU547292A1 |
| Межоперационный магазин | 1979 |
|
SU823079A1 |
| ФОТОТРАНСФОРМАТОР | 1968 |
|
SU220520A1 |
| УСТРОЙСТВО ДЛЯ РАЗРЕЗКИ ЗАГОТОВОК НА ШПОНЫ И НАБОРНЫЕ ЛИНЕЙКИ | 1970 |
|
SU272311A1 |
| Устройство для токарной обработки | 1974 |
|
SU552139A1 |
| Устройство для привода подающей линейки для многопозиционного пресса | 1986 |
|
SU1741603A3 |
3
31 fi .7J 32 «J
ч6
t7 fd VuZ t
3$
Jtf
us.i
4x
«й/г JJ J7 J( J4
Фаг. 7
