(54) СЛЕДЯЩАЯ СИСТЕМА
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1981 |
|
SU999016A1 |
| Устройство для передачи угла поворота вала | 1982 |
|
SU1042059A1 |
| Устройство для измерения параметров ветра | 1980 |
|
SU932406A1 |
| Преобразователь код-угол | 1984 |
|
SU1264345A1 |
| Устройство для контроля сельсин-датчиков | 1975 |
|
SU546925A1 |
| УСТРОЙСТВО для ПЕРЕДАЧИ УГЛА | 1967 |
|
SU205101A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯДВИГАТЕЛЕМ КАНАТНОГО БАРАБАНА ОПУСКАТЕЛЯ- КАНТОВАТЕЛЯ НА УСТАНОВКЕ НЕПРЕРЫВНОЙ РАЗЛИВКИСТАЛИ | 1972 |
|
SU428848A1 |
| Задающее устройство следящего электропривода | 1982 |
|
SU1056129A1 |
| ИЗМЕРИТЕЛЬ УГЛА РЫСКАНИЯ ПОДВИЖНОГО ОБЪЕКТА | 1971 |
|
SU298500A1 |
| Устройство для контроля точности индукционных датчиков магнитного курса | 1983 |
|
SU1210059A1 |
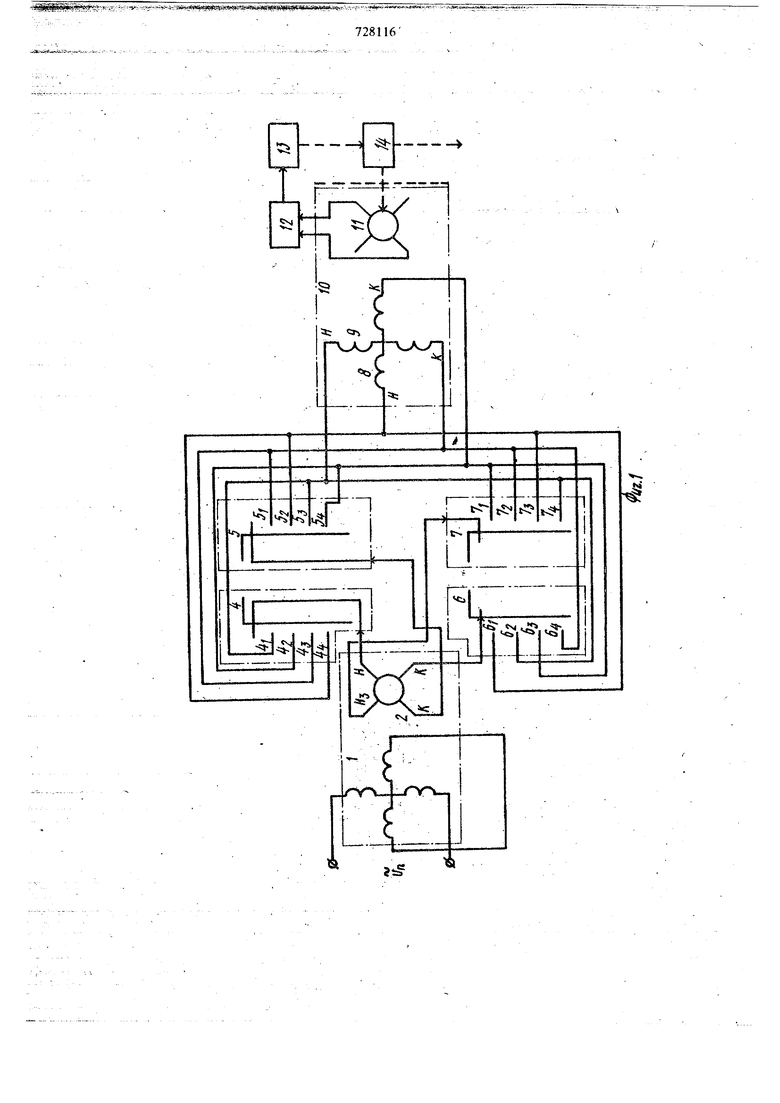
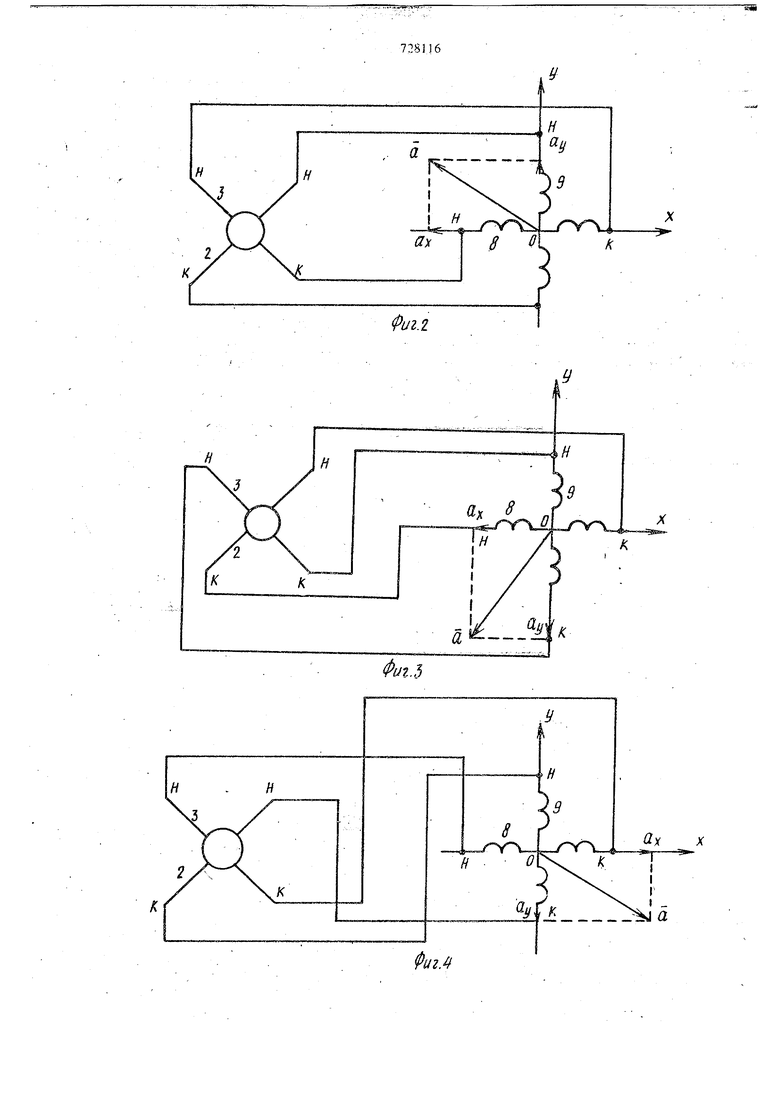
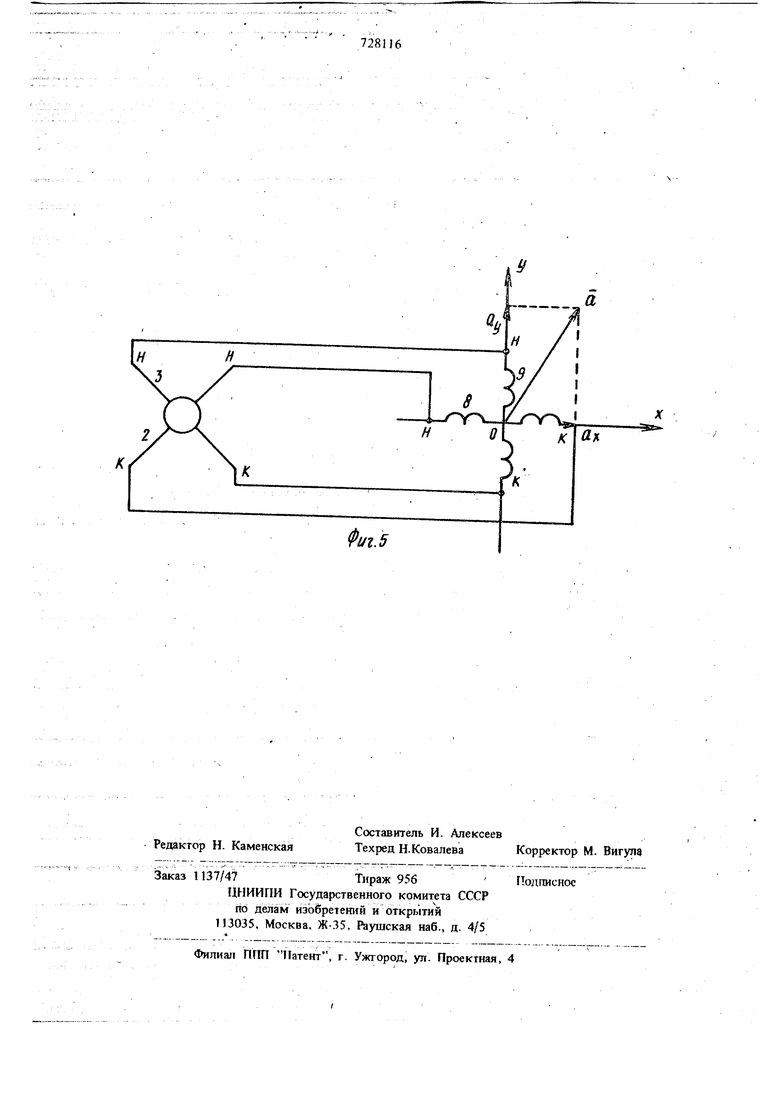
Изобретение относится к области абтоматического кбнтроля и может найти применение для контроля исправности следящих систем. Известны следящие системы с вращающимс датчиком, подключенным к приемнику по четырехпроводной схеме с использованием датчика-имитатора, снабженного шкалой для изме рения угла поворота 1 и 12. Недостатком этих систем является необходимость отключения рабочего датчика, что не обеспечивает полноть проверки следящей системы. Наиболее близкой по технической сущности к предлагаемой является следящая система, со держащая сельсин-датчик, сельсин-приемник, вы ход которого подключен через .усилитель к дви гателю, вал которого через редуктор соединен с валом сельсина-приемника 3. Недостатком такого устройства является ограниченная тошость контроля при положениях ротора датчика, в которых напряжение а одной из его обмоток синхронизаш1и максимально, а на другой равно нулю. Целью изобретения является повышение точности системы. Поставленная цель достигается тем, что предлагаемая игедящая система содержит первый, второй, третий и четвертый коммутаторы, первый, второй, третий и четвертый выходы сельсина-датчика соединены соответственно со входами горного, второго, третьего и четвертого коммутаторов, первые выходы которых соединены соответственно с первым, вторым, третьим и четвертым входами сельсинаприемника, вторые выходы - с четвертым, третьим, первым и вторым входами сельсинаприемника. Третьи выходы - со вторым, первым , четвертым и третьим входами сельсинаприемника, а четвертые выходы - с третьим, четвертым, вторым и первым входами сельсина-приемника соответственно. На фиг. 1 приведена принтдапиальная электрическая схема предлагаемой следящей системы; на фиг. 2-5 - векторные диаграммы изменения направления магнитного потока приемника, поясняющие работу устройства. си координат совмещены с осями обмоток синхронизации сельсина-приемника, а магнитные потоки ах и ЗУ пропорциональны напряжениям снимаемым с обмоток синхронизации сельсинадатчика. Вектор а - есть суммарный магнитны поток, определяющий положение ротора сельсина- приемника следящей системы. Система содержит сельсин-датчик 1 с обмотками синхронизации 2 и 3, первый, второй третий и четвертый коммутаторы 4-7, обмотки синхронизации 8 и 9 сельсина-приемник а 10, выходную обмотку II сельсина-приемника, усилитель 12, двигатель 13 и редуктор 14. При работе следящей системы поворот оси сельсина 10 достигается с помощью двигателя 13 fc редуктором 14 от сигнала усилителя 12, снятого с вькодной обмотки 11. Выходы коммутаторов 4-7 обозначены соответственно 4,-44,5,-54, 61-64 и 7i-74. При положении 4, 5j, 6} и 7j коммутаторов 4-7 напряжение, поступающее на обмотк 8 сельсина-приемника, находится в противофазе с напряжением обмотки синхронизации 3 сельсина-датчика 1 и равно ему по амшштуде а напряжение, постзтающее на обмотку синхронизации 9, наход 1тся в фазе с напряжением обмотки синхронизации 2 и равно ему по амплитуде . Для достижения этого начало обмотки 8 сельсина-приемника 10 соединяют с концом обмотки 3 сельсина-датчика 1, а конец обМотки 8 - с началом обмотки 3, начало обмотки 9 сельсина-приемника 10 соединяют с началом обмотки 2 сельсина-датчика 1, а конец обмотки 9 сельсина-приемника 10 - с концом обмотки 2 сельсина-датчика 1 (фиг.2) Напряжения, снимаемые с обмоток синхрон зации 2 и 3 сельсина датчика 1, определяются выражениями ,5in(/, и, и„-к,.со.л, где УП - напряжение питания обмотки возбуж дения сельсина-датчика 1, к j-коэффициент трансформации сельсина-датчика 1, о - угол поворота ротора сельсина-датчика 1. Как было сказано, в данном попоуккиМ электрическое соединение обмоток синхрониза ции сельсинов 10 выполнено таким образом, что напряжение на обмотке 9 сельсина-приемника 10 а напрйжение та обмотке 8 сельсина-приемки ка 10 ..ccaoC Знак минус означает встречное соединение обмоток 3 и 8. Напряжение на обмотке 11 сель сина -приемника 10 на входе усилителя 12 огда будет paBHoUy UgK -sinoC U V cjo-s-ot . - . „ 1 K,,(m. СОС.ОС,,- cosol.bin), где Uy- напряжение на входе усилителя 12, Кз - коэффициент трансформации сельсинаприемника 10, а - угол поворота ротора ельсина-приемника 10. В этом случае после обработки двигатель 13 системы через редуктор 14 развернет ротор Сельсина-приемника 10 в такое положение, при, котором напряжение на входе усилителя ,t -tg- и л При положении 4, 5, Т коммутаторов 4-7 напряжение, поступающее на рбмотку 8, находится в противофазе с напряжением обмотки 2 и равно ему по амтшитуде; а напряжение, поступающее на обмотку 9, находится в противофазе с напряжением обмотки 3 и равно ему по амплитуде,то есть и -и;,и -а . Для этого начало обмотки 8 соединяют с концом обмотки 2, а конец обмотки 8 - с началом обмотки 2; начало обмотки 9 соединяют с когщом обмотки 3, а конец обмотки 9 - с началом обмотки 3 (фиг. 3). В этом случае напряжение на входе усилйтеля 12 будет равно U U -К -sin К ,сс.с, :,,, . а . и после обработки станет равным нулю, когда - sim оС. sin сл. - cos ( оос, Oi, . то есть ротор сельсина-приемника 10 говернется на угол 90° по отношению к углу, с которого начинался контроль исправности. При положении 4з, Sj, 63 и 7з коммутаторов 4-7 напряжение, поступающее на обмотку 8, шхо;штся в фазе с напряжением обмотки 3 и равно ему ш амплитуде, а напряжение, поступающее на обмотку 9, находится в .вофазе с гапряжением обмотки 2 и равно ему по амплитуде, то есть .и,-и. Для этого начало обмотки 8 сельсина-приемника 10 соединяют с началом обмотки 3 сельсина-датчика 1, а конец обмотки 8 сельсина-приемника 10 - с концом обмотки 3 сельсина-датчика 1; начало обмотки 9 сельсинаприемника 10 соединяют с концом обмотки 2, а конец обмотки 9 - с началом обмотки 2 (фиг. 4). В этом случае напряжение на входе усилителя 12 будет равно U UgK.,, -., u.K n i;-u K cobcc,; ,j(cos, oC sinoC.,- sin oC «5s oC } и станет равным нулю, когда соьсс -tcobc - . 1о чо.it J J ., а так как фаза напряжения на входе усилителя и, следовательно, направление вращения ротора сельсина-приемника 10 не изменилось, тс ротор сельсина-приемника повернется на угол 180° по отношению к углу «,, с которого начинался контроль исправности, и йа угол 90° . по отношению к предыдутцему состоянию. При положении 4, 5, 64 и 7 коммутаторов 4-7 напряжения, поступающие на обмотки ,8 и 9, совпадают по фазе и амплитуде с напряжениями обмоток 2 и 3 соответственно. Для достижения этого начала и концьт обмоток 8 и 9 сель сина-приемника 10 соединяют с началами и ко1шями обмоток 2 и 3 сельсинадатчика 1 соответственно (фиг.5). В этом положении напряже1-ш:е на входе усилителя 12 будет равно U J К .« UgK tobbC r ,sin U K cobcC U К К Смпс.,оьс. -cosoC У join - и станет рав1шм нулю, когда (.+ f co5oC,-coSo L О, tgoCg « s-cfcigoc, ,,, Л,+270 а так как фаза напряжения на входе усилителя и, следовательно, направление вращения ротора сельсина-приемника 10 не изменилось, то ротор сельсина-приемника повернется на угол 270° по отношению к углу ОГ}, с которого начинался контроль исправности, и на угол 90° по отношению к предыдутцему состоянию. , „При поочередном переключении обмоток синхронизации датчика и приемника в соответстви с фиг. 1 ротор приемника будет поворачиваться В одну и ту же сторону и каждое его следующее положение будет отличасться от предыдущего на угол 90°, а суммарный угол поворота в результате составит 360°. Использование изобретения обеспечивает следующие преимущества: контроль исправности следящей системы производится при любых положениях сельсина-датчика; контроль исправности следятцей системы производится в пределах полного оборота сельсина-приемника, что обеспечивает надежную проверку следящего привода. Указанные преимущества повыщают точность контроля исправности следящей системы и поз.воляют получить промежуточные положения приемника, отстоящие друг от друга на 90° в гфеделах его г олного оборота. Формула изобретения Следящая система, содержащая сельсин-датчик, сельсин-приемник, выход которого подключен через усилитель к двигателю, вал которого через редуктор соединен с валом сельсинаприемника, отличающаяся тем, что, с целью повышения точности системы, она содержит первый, второй, третий и четвертый коммутаторы, первый,, , второй, третий и четвертьш выходы сельсина-датчика соединены соответственно со входами первого, второго, третьего и четвертого коммутаторов, первые выходы которых соединены соответственно с первым , вторым, третьим и четвертым входами сельсина-приемника, вторые выходы с четвертым, третьим, первым и вторым входами сельсина-приемника, третьи выходы со вторым, первым , четвертым и третьим входами сельсина-приемника, а четвертые выходы-с третьим, четвертым, вторым и первым входами сельсина-приемника соответственно. Источники информации, принятые во внимание при экспертизе 1.Черньппев В. О. Поворотные трансформаторы и их применение в вычислительных и автоматических устройствах, М., Энергия, 1965, с. 30-33. 2.Хрущев В. В. Электрические, микромашиы переменного тока для; устройств автоматики, М., Энергия, 1969, с.82-83. 3.Авторское свидетельство СССР N 222484, кл. G 05 В 23/02, 968 (прототип).
Фиг.г
Фиг.д
