Известиые конструкции роликовых листоукладчиков, с механизмом выведения роликов из-иод пакетируемого листа имеют следуюш,ие недостатки: 1) сложность настройки роликов нрн переходе на иакетировку листов другой ширины; 2) нанесение дефектов на поверхность листов вследствие проскальзывания листа по поверхности неприводных роликов.
Описываемое устройство отличается тем, что рычаги механизма выведения роликов изпод листа связаны между собой зубчатыми секторами, а корпус поршневого привода снабжен механизмом осевого перемещения, например червячно-винтовым, при этом ролики снабжены приводом, установленным на уномянутых рычагах. Это позволяет упростить настройку листоукладчика при изменении ширины пакетируемых листов за счет регулирования величины хода роликов и их синхронного перемещения, а также уменьщить возможность нанесения иоверхностных дефектов на лист и предотвратить проскальзывание листов по роликам.
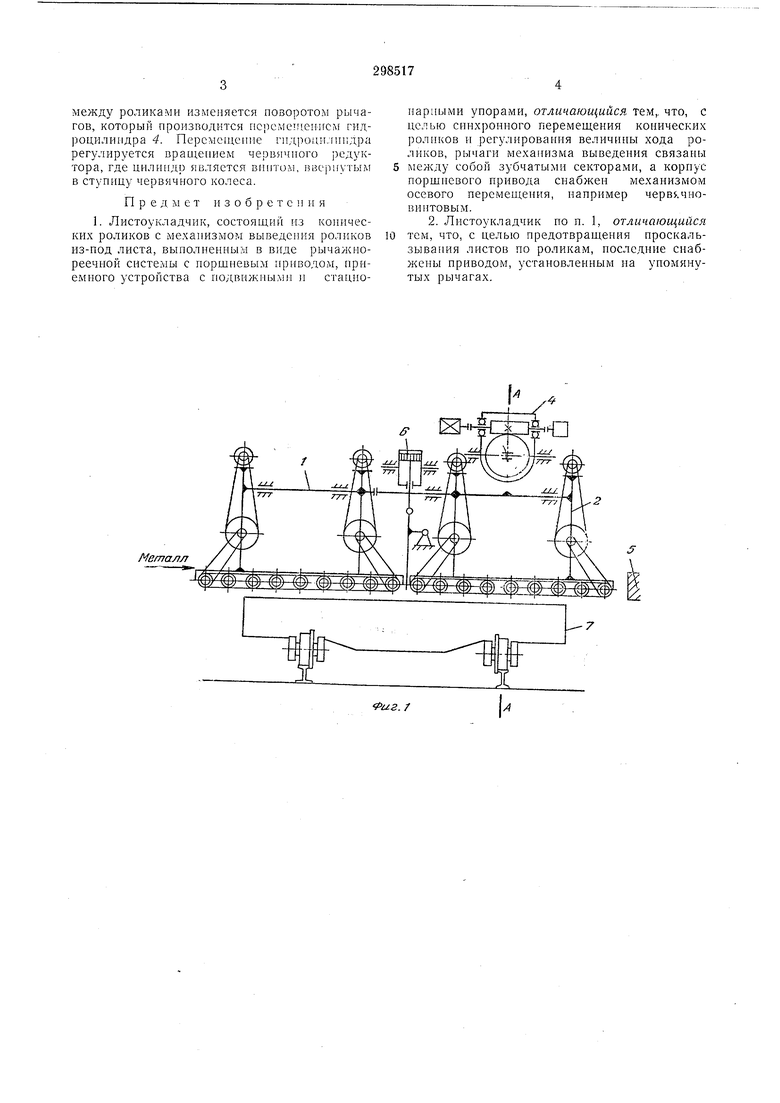
На фиг. 1 показана кинематическая схема предложениого листоукладчика; на фиг. 2 - разрез по А-А фиг. 1.
причел( кача10Н1.неся рычаги связаны между собой зубчатыми секторами 3. Перемещег1ие роликов осуществляется от перемещающегося гидроцилиидра 4. В конце укладчика по ходу 5 металла расположен стационарный упор 5, в средней части на раме /-подъемный упор 6 с приводом от пневмоцилиндра. Под качающимися роликами установлена цередвилсная нлатформа 7 с приводом передвижения от гидроцилиндра. На платформе установлена
0 стационарная линейка и имеется стеллаж для приема пакетов листов. Для выравнивания боковых кромок накета листов установлен боковой досылатель 8 с нриводом от пневмоцилиндра.
5
Листоукладчик работает следующим образом.
Листы от правильной мащины ;подающими роликами или рольгапгом подаются на коиические прпводные ролики, которце транспор20тируют его к стационарному yniopy 5 или подъемному унору 6. Затем качающиеся рычаги 2 поворачиваются и выводят ролики изпод листа, лист укладывается ijia стеллаж 5 платформы 7. Нлатформа при этой устаиавливается так, чтобы между листом i стационарной линейкой платформы был небольшой зазор. Но мере набора пакета торцы листов в пакете выравниваются боковым j досылателем 6. Нри изменении ширины лцста раствор
между роликами изменяется поворотом рычагов который производится исрсмепенпсм гидроцилипдра 4. Перемещение гидролилипдра регулируется вращением червячного редуктора, где цилиидр является винтом, ввернутым в ступицу червячного колеса.
Предмет изобретен и я 1 Листоукладчик, состоящий из конических роликов с механизмом выведения роликов из-под листа, вынолиеииым в виде рычажиореечной системы с иорщпевым приводом, приемного устройства с подвижными и стациопарными упорами, отличающийся тем,, что, с целью сиихропиого перемещения конических роликов п регулирования величины хода роликов, рычаги механизма выведеиия связаны собой зубчатыми секторами, а корпус поршиевого привода сиабжеи механизмом осевого перемещения, иапример чepв.чнoвиптовым.
2. Листоукладчик ио п. 1, отличающийся тем, что, с целью предотвращения проскальзывания листов ио роликам, последние снабжены приводом, устаиовлеиным иа уиомянутых рычагах.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДОСЫЛАТЕЛЬ ЛИСТОУКЛАДЧИКА | 1993 |
|
RU2061569C1 |
| ЛИСТОУКЛАДЧИК19 | 1973 |
|
SU398318A1 |
| Технологическая линия | 1969 |
|
SU327736A1 |
| Механизированная линия резки листового проката | 1983 |
|
SU1143530A1 |
| Механизированная линия резки листового проката | 1979 |
|
SU946823A1 |
| УКЛАДЧИК ЛИСТОВ | 1969 |
|
SU253002A1 |
| Автоматическое загрузочное устройство | 1984 |
|
SU1220783A1 |
| Устройство для вырубки изделий из резины | 1976 |
|
SU649596A1 |
| Устройство для укладки листов в пакеты | 1981 |
|
SU1007775A1 |
| ПОЛУАВТОМАТ ДЛЯ ПРИШИВАНИЯ ПУГОВИЦ С НОЖКОЙ ИЗ НИТИ | 1971 |
|
SU424928A1 |

Неглалл
(фуф
