Известны автоматические установки для дробеметной обработки цилиндрических .изделий, вынолненные ,в виде нескольких изолированных камер, содержащих загрузочно-транспортирующее устройство с механизмом захвата и отсекания деталей, устройство для перемещения деталей через рабочую камеру и разгрузочное устройство с наклонным выдающим лотком.
Предлагаемая устанавка отличается от известных тем, что загрузочно-транснортирующее устройство выполнено в виде устано-вленного в загрузочном окне камеры отсекателя и каретки с захватом, кинематически связанных посредством полумуфт и канатной тяги с приводом, а разгрузочное устройство выполнено в виде двух, образующих желоб, поворотных ПОЛО.К, раскрывающихся под действием силы тяжести деталей, выдаваемых на снабженный антиударным устройством лоток. Такое выполнение установки позволяет обеспечить синхронизацию работы загрузочного .и транспортирующего устройств, а также ориентированную выдачу изделий.
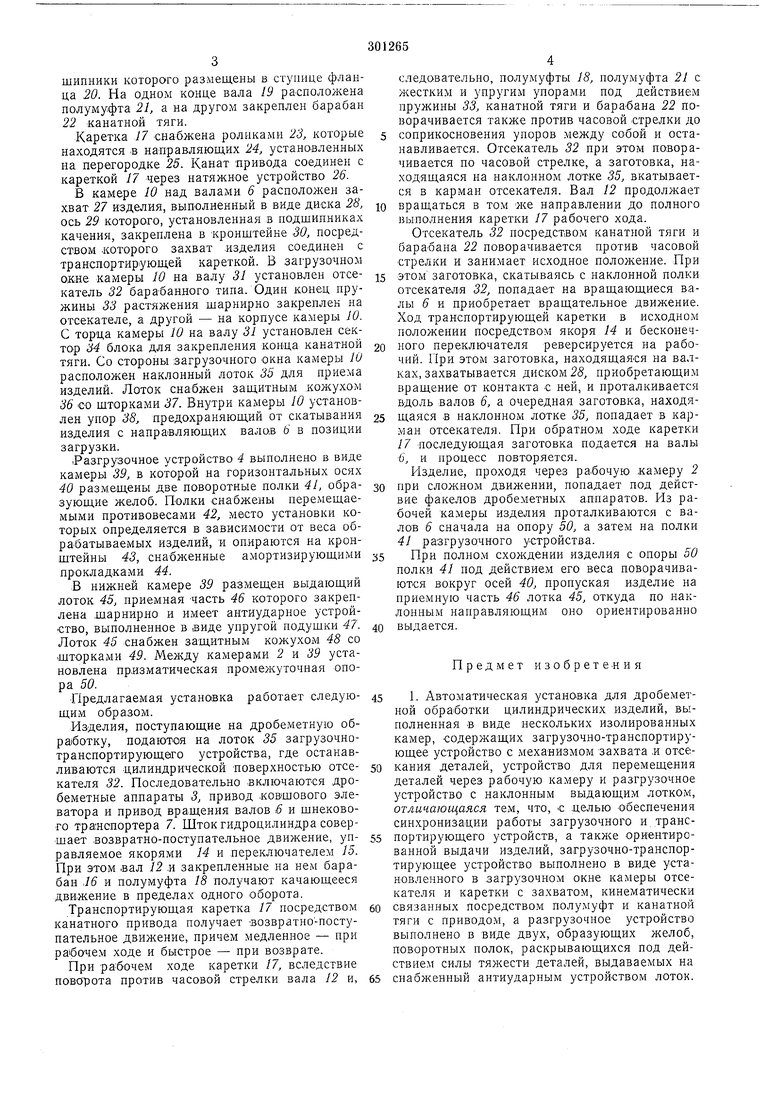
Для уменьщения трения мелсду транспортируемым изделием и захватом каретки захват выполнен в виде свободно вращающегося от контакта с изделием диска, закрепленного на смещенной относительно осевой ЛИНЕЙ изделия оси,
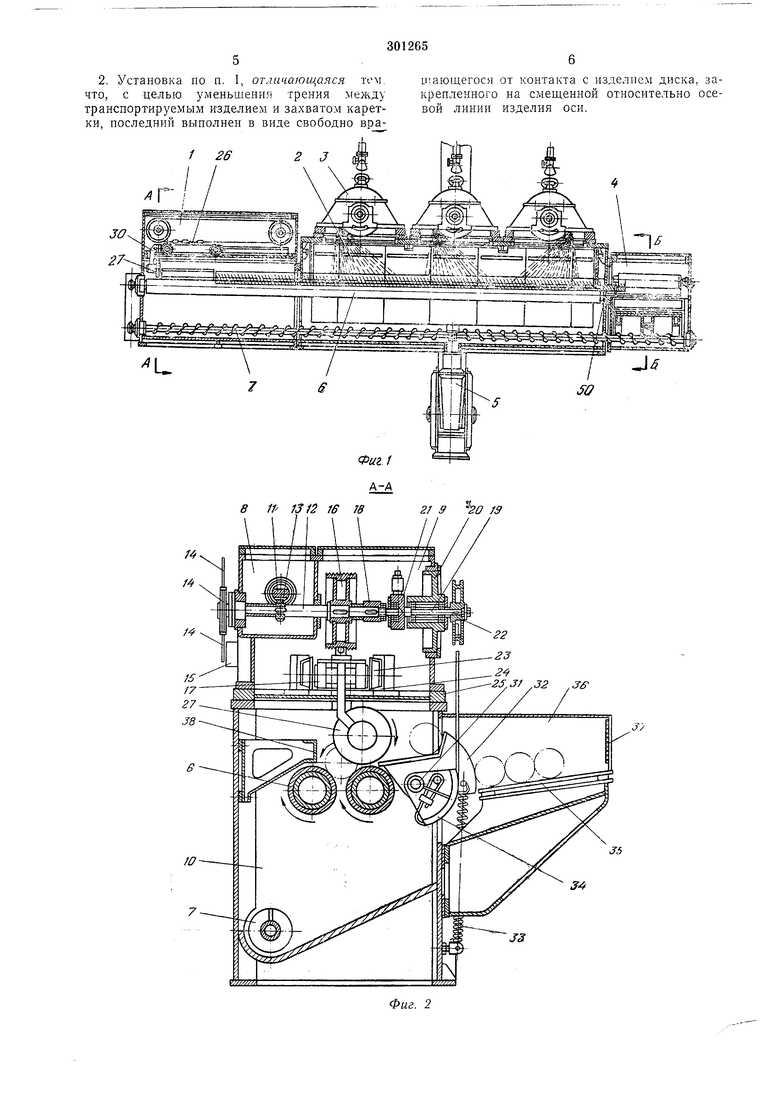
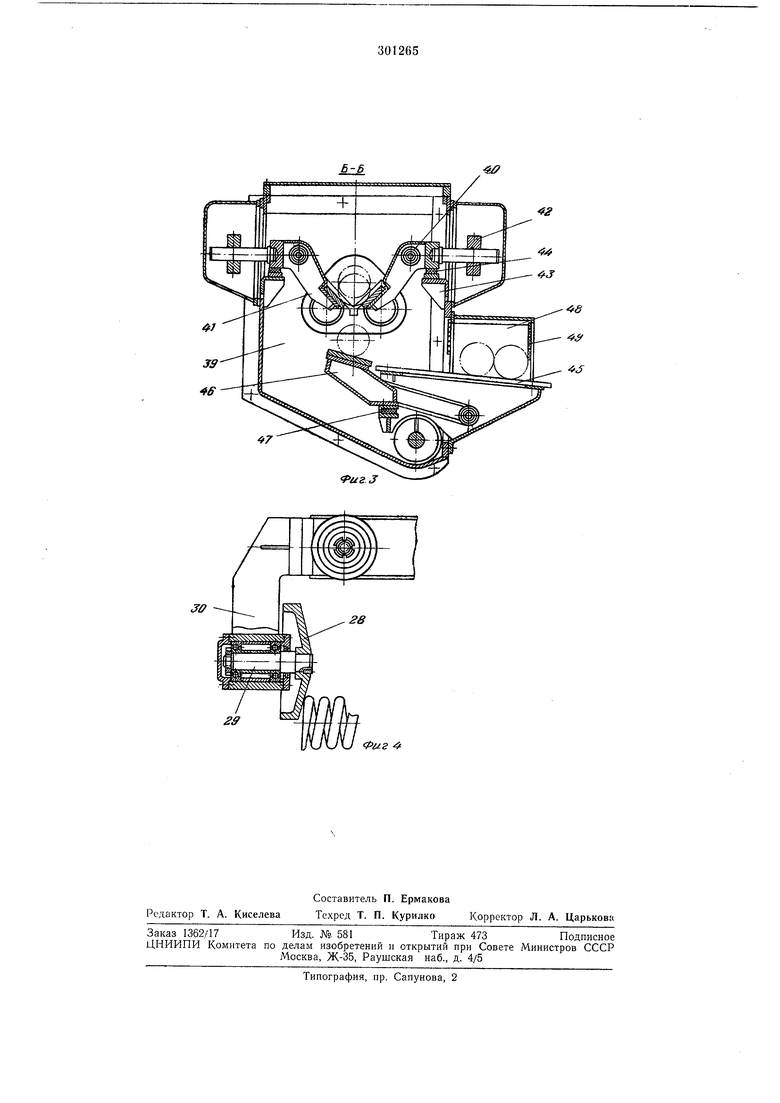
На фиг. 1 изображена предлагаемая каретка; на фиг. 2 - загруЗОчно-транспортирующее устройство, поперечный разрез; на фиг. 3 - разгрузочное устройство, поперечный разрез;
на фиг. 4 - захват изделия транспортирующей каретки, продольный разрез.
Автаматическая установка содержит загрузочно-транспортирующее устройство /, рабочую камеру 2, на которой установлены дробеметные аппараты 3, разгрузочное устройство 4 и ковшовый элеватор 5.
Внутри загрузочно-транспортирующего устройства / н рабочей камеры установлены два гладких направляющих вала 6, а в нижней
части устройств 1 и 4 размещен шнековый транспортер 7.
Внутренняя часть корпуса разгрузочно-транспортирующего устройства разделена перегородками на три камеры 8, 9 1л 10. В герметизированной камере 8 размещены гидродилиндр (на чертежах не показан), щток которого Щарнирно соединен с рейкой 11, и вал 12 с шестерней 13. На одном конце вала 12, выходящим наружу из корпуса, закреплен диск с
двумя якорями 14 бесконтактного путевого
переключателя 15, а на другом, выходящим в
камеру 9, - барабан 16 канатного привода шипники которого размещены в ступице фланца 20. На одном конце вала 19 расположена полумуфта 21, а на другом закреплен барабан 22 канатной тяги. Каретка 77 снабжена роликами 23, которые находятся в направляющих 24, установленных на перегородке 25. Канат привода соединен с кареткой 17 через натяжное устройство 26. В камере 10 над валами 6 располол ен захват 27 изделия, выполненный в виде диска 28, ось 29 которого, установленная в подшипниках качения, закреплена в кронштейне 30, посредством .которого захват .изделия соединен с транспортирующей кареткой. В .загрузочном окне камеры W на валу 31 установлен отсекатель 32 барабанного типа. Один конец пружины 33 растяжения шарнирно закреплен на отсекателе, а другой - на корпусе камеры 10. С торца камеры 10 на валу 31 установлен секто.р 34 блока для закрепления конца канатной тяги. Со стороны загрузочного окна камеры 10 расположен наклонный лоток 35 для приема изделий. Лоток снабжен защитным кожухом 6 со шторками 37. Внутри камеры 10 установлен упор 38, предохраняющий от скатывания изделия с направляющих валов 6 в позиции загрузки. Разгрузочное устройство 4 выполнено в виде камеры 39, в которой на горизонтальных осях 40 размещены две поворотные полки 41, образующие желоб. Полки снабжены перемещаемыми противовесами 42, место установки которых определяется в зависимости от веса обрабатываемых изделий, и опираются на кронштейны 43, снабженные амортизирующими прокладками 44. В нижней камере 39 размещен выдающий лоток 45, приемная часть 46 которого закреплена шарнирно и имеет антиударное устройство, выполненное в виде упругой подушки 47. Лоток 45 снабжен защитным кожухом 48 со шторками 49. Между камерами 2 & 39 установлена пр.изматическая промежуточная опора 50. .Предлагаемая установка работает следующим образом. Изделия, поступающие на дробеметную обра1ботку, подаются на лоток 35 загрузочнотранспортирующего устройства, где останавливаются цилиндрической поверхностью отсекателя 32. Последовательно включаются .дробеметные аппараты 3, привод .ковшового элеватора и привод вращения валов 6 и шнекового транспортера 7. Шток гидроцилиндра совершает возвратно-поступательное движение, управляемое якорями 14 и переключателем 15. При этом вал 12 .и закрепленные на нем барабан ,16 и полумуфта 18 получают качающееся движение в пределах одного оборота. Транспортирующая каретка 17 посредством канатного привода получает возвратно-поступательное движение, причем медленное - при рабочем ходе и быстрое - при возврате. следавательно, полумуфты 18, полумуфта 21 с жестким и упругим упорами под действием пружины 33, канатной тяги и барабана 22 поворачивается также против часовой стрелки до соприкосновения упоров между собой и останавливается. Отсекатель 32 при этом поворачивается по часовой стрелке, а заготовка, находящаяся на наклонном лотке 35, вкатывается в карман отсекателя. Вал 12 продолжает вращаться в том же направлении до полного выполнения каретки 17 рабочего хода. Отсекатель 32 посредством канатной тяги и барабана 22 поворачивается против часовой стрелки и занимает исходное положение. При этом заготовка, скатываясь с наклонной полки отсекателя 32, попадает на вращающиеся валы 6 и приобретает вращательное движение. Ход транспортирующей каретки в исходном положении посредством якоря 14 и бесконечного переключателя реверсируется на рабочий. При этом заготовка, находящаяся на валках, захватывается диском 25, приобретающим вращение от контакта с ней, и проталкивается вдоль валов 6, а очередная заготовка, находящаяся в наклонном лотке 35, попадает в карман отсекателя. При обратном ходе каретки 17 последующая заготовка подается на валы 6, и процесс повторяется. Изделие, проходя через ра.бочую камеру 2 при сложном движении, попадает под действие факелов дробеметных а.ппаратов. Из рабочей камеры изделия проталкиваются с валов 6 сначала на опору 50, а затем на полки 41 разгрузочного устройства. При полном схождении изделия с опоры 50 полки 41 под действием его веса поворачиваются вокруг осей 40, пропуская изделие на приемную часть 46 лотка 45, откуда по наклонным нанравляющим оно ориентированно выдается. Предмет изобрете.ния 1. Автоматическая установка для дробеметой обработки цилиндрических изделий, выолненная в виде нескольких изолированных амер, содержащих загрузочно-транспортирущее устройство с механизмом захвата .и отсеания деталей, устройство для перемещения еталей через рабочую камеру и разгрузочное стройство с наклонным выдающим лотком, тличающаяся тем, что, с целью .обеспечения инхронизации работы загрузочного и трансортирующего устройств, а также ориентироанной выдачи изделий, загрузочно-транспорирующее устройство выполнено в виде устаовленного в загрузочном окне камеры отсеателя и каретки с захватом, кинематически вязанных посредством полумуфт и канатной яги с приводом, а разгрузочное устройство ыполнено в виде двух, образующих желоб, оворотных полок, раскрывающихся под дейтвием силы тяжести деталей, выдаваемых на 2. Установка по п. I, отличающаяся том. что, с целью уменьшени.я трения между транспортируемым изделием и захватом каретки, последний выполнен в виде свободно вра/2ff дающегося от контакта с изделием диска, закрепленного на смеш,енной относительно осевой линии изделия оси.
J-6
fuz J
2ff
г
(PifZ 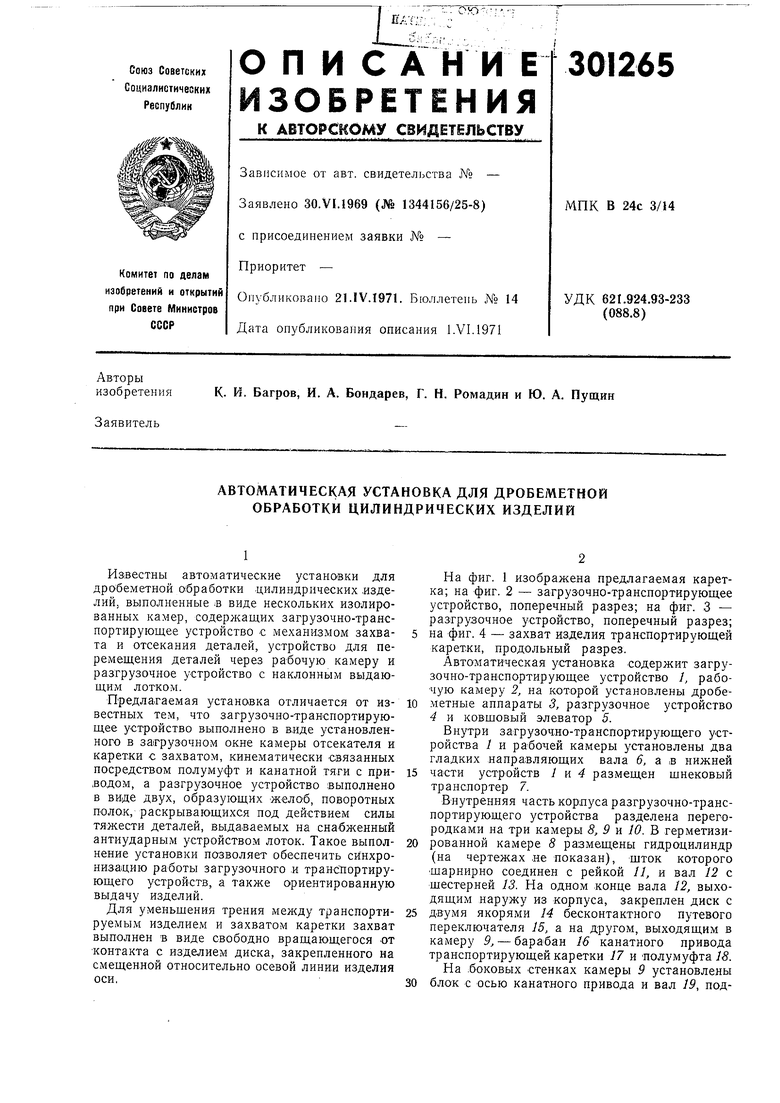
| название | год | авторы | номер документа |
|---|---|---|---|
| АГРЕГАТ ДЛЯ ТЕРМООБРАБОТКИ ЗАГОТОВОК | 1970 |
|
SU267668A1 |
| УСТРОЙСТВО ДЛЯ ТЕРМИЧЕСКОЙ ОБРАБОТКИ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ | 1972 |
|
SU435295A1 |
| Автооператор | 1970 |
|
SU355848A1 |
| Автоматическая линия для изготовления деталей типа скоб | 1982 |
|
SU1134351A1 |
| КАРУСЕЛЬНАЯ СУШИЛКА | 2016 |
|
RU2636957C1 |
| Резьбонакатный станок для деталей с головками | 1989 |
|
SU1697957A1 |
| Загрузочно-разгрузочное устройство | 1983 |
|
SU1115883A1 |
| Устройство для загрузки деталей | 1991 |
|
SU1802779A3 |
| АВТОМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ПОДАЧИ И ОРИЕНТАЦИИ ИЗДЕЛИЙ | 1991 |
|
RU2015092C1 |
| АВТОМАТ РОТОРНОГО ТИПА ДЛЯ ПОДРЕЗКИ КРУГЛЫХЗАГОТОВОК | 1969 |
|
SU251402A1 |