Дробеметно-дробеструйная камера может быть использована в литейных цехах заводов тяжелого машиностроения.
Известна дробеметная камера, выполненная в виде установленных на потолке и стенках камеры дробеметных аппаратов и сопел дробеметных аппаратов.
О.писываемая камера отличается тем, что потолок с дробеметнымн аппаратами установлен на БИНТОВЫХ домкратах с общим приводом и снабжен стопорным механизмом, например, .клиновым, взаимодействующим с камерой и управляемым приводом виптовых домкратов. Это повышает эффективность очистки и производительность путем перемещения обрабатываемых органов. Кроме того, для уменьшения нагрузки винтовых домкратов камера снабжена .системой противовесов, соединенных с потолком с помощью гибкой связи, установленной в направляющих камеры.
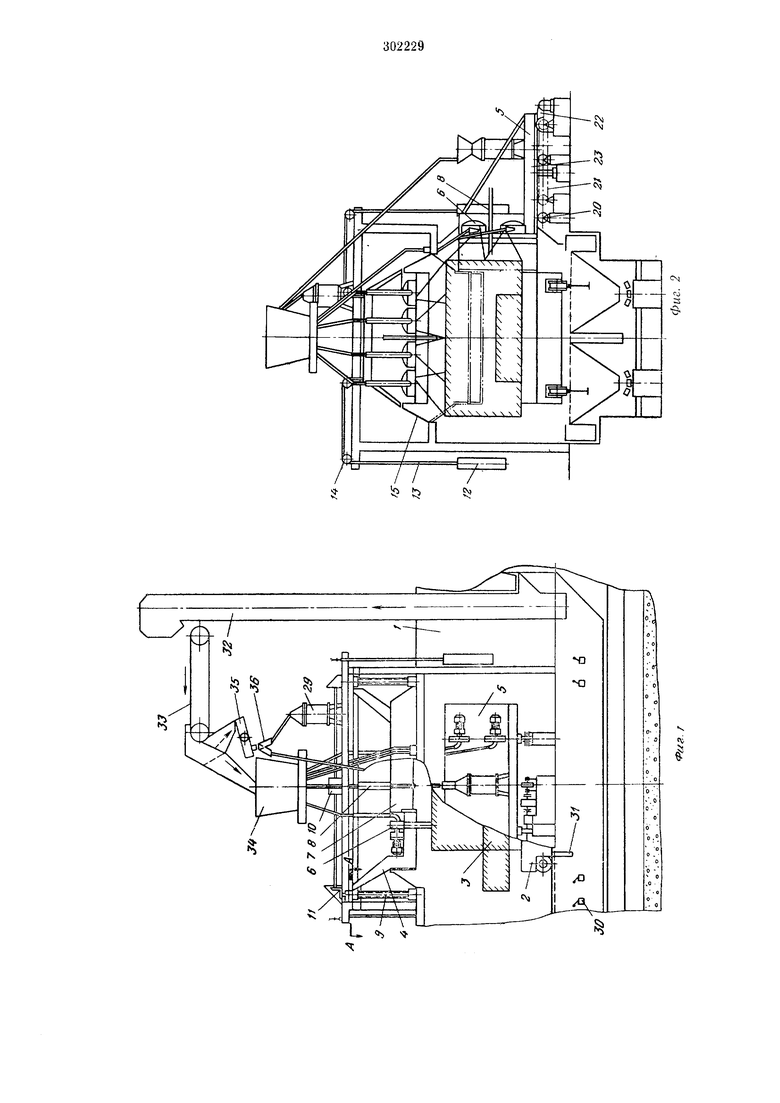
На фиг. 1 изображена .предложенная дробеметно-дробеструйная камера, общий вид; на фиг. 2 - поперечный разрез камеры; на фиг. 3 - разрез по А - А на фиг. 1; на фиг. 4 - подвижная тележка с дробемонитором, установленная на подвижном потолке; на фнг. 5 - поперечный разрез подвижной тележки.
ку 2, на которой установлено очищаемое изделие 3, подвижный потолок 4 и подвижную стенку 5. Самоходная тележка 2 снабжена поворотны.м столом и имеет возмол ность соверщать регулнруемое челночное движение или установочное перемещение внутри камеры. На подвижном потолке установлены дробеметные аппараты 6 и тележка 7, снабженная дробеструйным соплом, укрепленным в
дробемониторе 8 телескопической конструкции. Тележка 7 имеет установочное перемещение вдоль паза в подвижном потолке. Паз расположен поперек камеры. Подвижной потолок подвещен на четырех винтовых домкратах 9, установленных на камере и получающих вращение от одного электродвигателя 10 через конические зубчатые пары П. Для уменьщения нагрузки на винтовые до.мкраты и, следовательно, потребной мощности привода перемещения нодвижного потолка больщая часть веса последнего уравновешена системой противовесов 12 (см. . 2) посредство.м тросов 13, укрепленных на потолке и перекинутых через блоки 14, установленные на камере. Зазор между камерой и подвижным потолком перекрывается уплот 1ением 15 в виде эластичной диафрагмы, например, из резины, обеспечивающим величину необходп.мого перемещения потолка. Для уменьшения динамиаппаратов на подвижной потоло.к последний снабжен клиновым стопорным механизмом, замыкаюш,им его на корнус камеры носле совершения установочного неремещения. Клиновой стопорный механизм состоит из подвижного клина 16 (см. фиг. 3), сопрягаюпдегося с обратным клином 17, расположенным на корпусе камеры. Нормальное замыкание механизма осуществляется под действием пружины 18, а для размыкания .предусмотрен тяговый орган, например силовой цилиндр 19. Подвижная стенка 5 {см. фиг. 2), на которой укреплены дробеметные аппараты, установлена на неприводных роликах 20 и совершает установочное перемещение посредство.м силового нривода, состоящего из тяговой цепи 21, к которой прикреплена стенка, и двигателя 22. На атой же стенке установлен дробемонитор телескопической конструкции. Зазор между камерой и подвил ной стенкой перекрыт уплотнением в виде эластичной диафрагмы. Положение подвижной стенки фиксируется приводными зажимами 23. Тележка 7 (см. фиг. 4 и 5) имеет кабину 24, в которой размещается оператор, управляющий дробемонитором, и в которой он может соверщать установочное перемещение по рельсам 25 вдоль паза 26. Паз всегда перекрыт эластичным уплотнением 27. Для .перемещения тележки 7 предусмотрен ручной привод 28, который при необходимости может быть механизирован. Для уменьшения веса перемещаемых масс на тележке 7 устанавливается только дробе.монитор, а дробеструйный аппарат 29 (см. фиг. 1), питающий этот дробемонитор дробью, установлен на камере. Дробеструйный аппарат снабжен дистанционным или автоматическим управлением. Для регулировки челночного движения самоходной тележки 2 вдоль камеры установлены с определенным шагом конечные выключатели 30, взаимодействующие с упором 31 самоходной тележки.
Попарным включением в цепь управления конечных выключателей достигается необходимая длина хода самоходной тележки при челночном движении. Кроме этого, таким же способом производится фиксация тележки против одной зоны дробеметных аппаратов при очистке изделия при вращении на поворотном столе самоходной тележки. Камера обслуживается двумя тележками 2, расположенными ic разных сторон камеры. Пока одпа тележка с изделием находится в камере, вторая находится .под загрузкой. В зависимости от габаритов подлежащего очистке изделия определяется положение потолка и подвижной .стенки, а также определяется способ обработки.
При обработке изделия с вращением поворотного стола, тележка устанавливается против одной зоны дробеметных аппаратов (остальные аппараты выключены). После очистки изделия дробеметными аппаратами неочищенные труднодоступные места очип.1аются дробеструйным соплом, закреплепным в
дробемониторе телескопической конструкции, снабженном силовыми приводами изменения вылета, поворота монитора и попорота сопла. Работа дробемет}1ых аппаратов и дрОбе.мо11Итора сблокирована так, что при работе первых второй не работает и наоборот. Во время работы дробемонитора телел ка 2 .может совер.щать установочное перемещение вдоль камеры. Необработанные труднодоступные места верхней части изделия обрабатываются дробе.мониторо.м, расположенным на тележке 7. Сочетание установочных перемещений тележек 7 и 2 позволяет обработать все труднодоступные места изделия. Транспорт, очистка и сепарация дроби осуществляются известным в технике способом с применением воздушных и магнитных сепараторов. Очищенная дробь элеватором 32 подается на транспортер 33, откуда она поступает, в зависимости от
вида обра ботки, либо в расходный бункер 34, либо в грохот 35, где происходит отделение фракций для дробеструйной обработки. Вся остальная дробь с грохота поступает в расходный бункер 34, .который в случае поступления в него дроби с грохота соединяется специальной течкой с полостью камеры. Направление потока дроби к дробеструйным аппаратам определяется положением перекидного клапана 36. Дробь к дробеметным аппаратам
поступает из бункера по дробеводам, включающим в себя устройство, обеспечивающее питание подвижных дробемсгных аппаратов. На концах всех дробеводов установлены секторные затворы известной конструкции.
П р е д .м е т изобретения
1.Дробеметпо-дробеструйная камера, выполненная в виде установленных иа потолке
и стенах камеры дробеметиых аппаратов и сопел дробеструйных аппаратов, отличающаяся тем, что, с целью повышения эффективности очистки и повышения производительности
путем пере.мсщения обрабатывающих opraiioB, потолок с дробеметпыми аппаратами установлен на винтовых домкратах с общим приводом и снабжен стопорным механ1 змо.м, например клиновым, взаимодействующим с камерой и управляемым приводом Байтовых домкратов.
2.Дробеметпо-дробеструйная камера по п. 1, отличающаяся тем, что, с целью уменьщения нагрузки винтовых домкратов, она
снабжена системой противовесов, соединенных с потолком с по.мощью гибкой связи, установленной в .направляющих камеры.
3.Дробеметпо-дробеструйная камера по пп. 1 и 2, отличающаяся тем, что стенки камеры, на которых установлепы обрабатывающие органы, снабжены опорами качения горизонтального перемещения стенки с приводо.м и стопорным механизмом, например клиновым, взаимодействующим с камерой и
Ч 
| название | год | авторы | номер документа |
|---|---|---|---|
| Дробеметная установка | 1984 |
|
SU1201116A1 |
| Установка для дробеметной обработки внутренней поверхности труб | 1990 |
|
SU1756129A1 |
| Дробеметное устройство для очистки наружной и внутренней поверхностей труб | 1988 |
|
SU1576298A1 |
| Установка для очистки вертикальных поверхностей | 1971 |
|
SU595134A1 |
| Установка для обработки изделий абразивом | 1986 |
|
SU1371890A1 |
| УСТАНОВКА ДЛЯ ДРОБЕСТРУЙНОГО НАКЛЕПА ИЗДЕЛИЙ | 1970 |
|
SU261433A1 |
| Установка для обработки деталей дробью | 1979 |
|
SU872235A1 |
| Дробеметная камера для очисткиКРупНОгАбАРиТНыХ издЕлий | 1978 |
|
SU846253A1 |
| Дробеметный барабан периодического действия | 1985 |
|
SU1281391A1 |
| УСТАНОВКА ДЛЯ ДРОБЕСТРУЙНОЙ ОЧИСТКИ ВНУТРЕННЕЙ ПОВЕРХНОСТИ ТРУБ | 2022 |
|
RU2794311C1 |

V
