Изобретение относится к устройствам, обеспечивающим безопасность работы мостовых крапов, работаюп1их совместно.
Известны следяш,ие устройства для контроля расстояния между мостовыми кранами, включающие корпус с отклоняющим блоком для гибкой связи, соединенной с противовесом.
Описываемое устройство отличается от известных тем, что с целью повыщепия точности работы противовес выполнен с кулачком, взаимодействующим с конпевыми выключателями, и снабжен защелкой для соединения с гибкой связью.
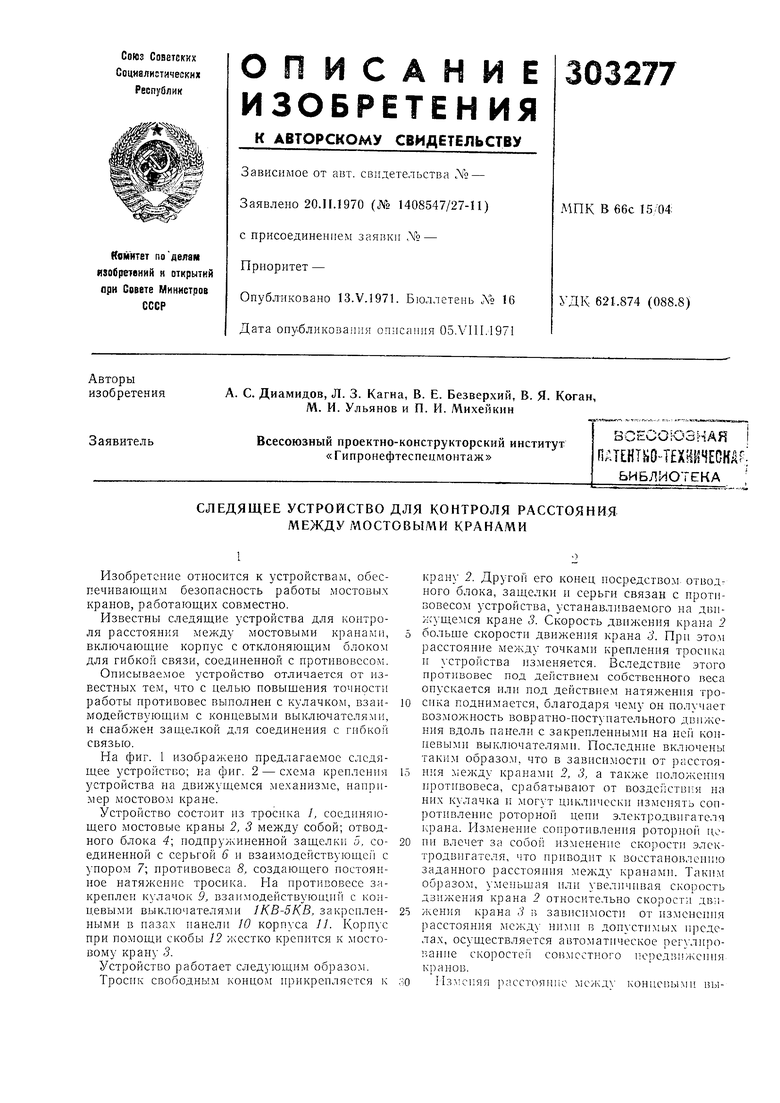
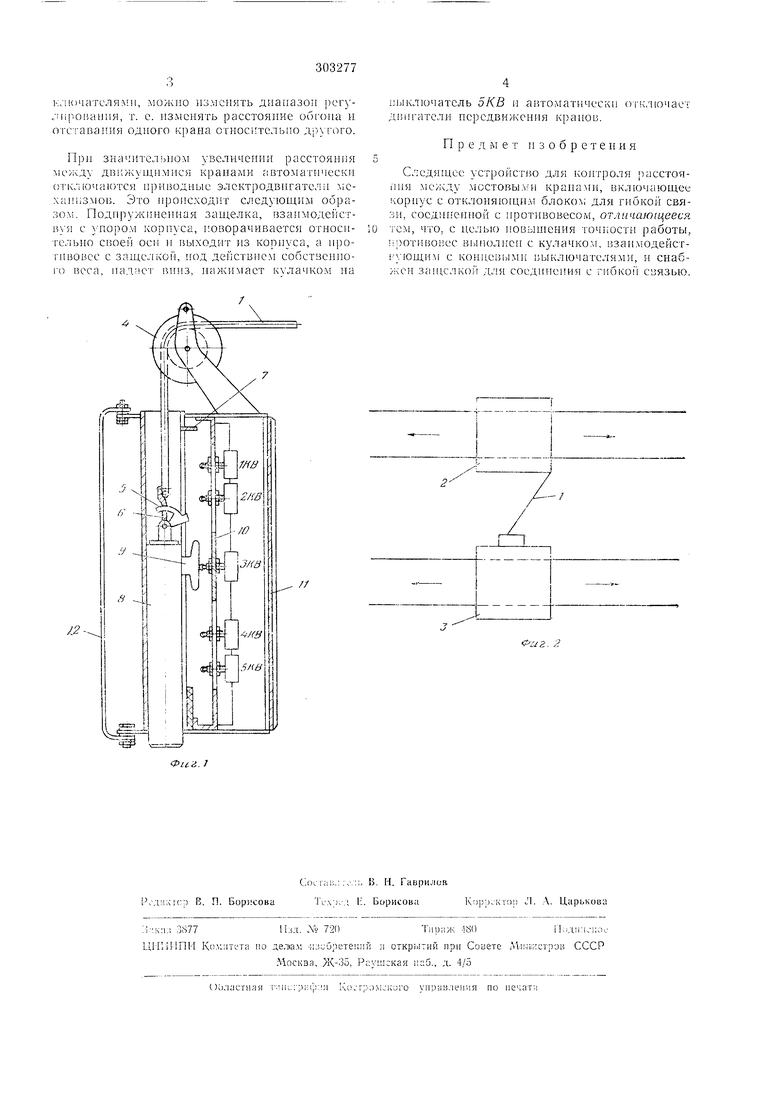
На фиг. 1 изображено предлагаемое следящее устройство; па фиг. 2 - схема крепления устройства на движущемся механизме, например мостовом кране.
Устройство состоит из тросика 1, соединяющего мостовые крапы 2, 3 между собой; отводного блока 4; нодпружипеппой защелки 5, соединепной с серьгой 6 и взаимодействующей с унором 7; противовеса 8, создающего постоянное патяжепие тросика. На противовесе закреплен кулачок 9, взаимодействующпй с конпевыми выключателями 1КВ-5КВ, закрепленными в пазах панели W корпуса 11. Корпус при помощи скобы 2 жестко крепится к мостовому крану 3.
крану 2. Другой его конец посредством отводного блока, защелки п серьги связан с противовесом устройства, устанавливаемого на движущемся крапе 3. Скорость движения крапа 2 больще скоростп двпжения крана о. При это-м расстояние между точками крепления тросика п устройства изменяется. Вследствие этого противовес под действием собственного веса оиускается или под действием натялсения тросика поднимается, благодаря чему он получает возможность вовратно-поступательного движения вдоль панели с закрепленпымп на ней коппевыми выключателями. Последние включены таким образом, что в зависимости от расстояния между кранами 2, 3, а также положения противовеса, срабатывают от воздействия па них кулачка и могут циклически изменять сопротивление роторной цепи электродвигателя крапа. Измепеиие сопротпвленпя ротор)ой пони влечет за собой измепение скорости электродвигателя, что приводит к восстаповлеип 0 заданпого расстояппя между кранамп. Таки: 1 образом, умепьщая пли увеличивая скорость движения крана 2 относительно скорост; дв; жения крапа 3 г завпсимостп от измсиеппя расстояния между ними в допустимых 11редслах, осуществляется автоматпческое регулирор.апие cKopocTeii coв ccтпoгo псредвпжепия кранов.
нл1()1атсля: П1, можно излгспйть диаиазоп рсгу.М1р.011ания, т. с. изменять расстояние обгона и отставания одного крана относительно другого.
П)11 значительном увеличении расстояния дв1; кундим ся кранами ,втоматичееки ()тк;иоча()тся н|)иводиыс электродвигатели мехаиизлюи. Это нронсходнт следуюидим образо ;. Подпру/книсниая защелка, взаимодействуя с }нором корнуса, новорачивается относительно своей OCI-I и выходит из корпуса, а нрогнвовес с защелкой, иод действием собственио|о веса, иадпет винз, кулачком на
выключатель 5КВ и автоматически отключает двигатели иередвижения краиов.
Предмет и з о б р е т е i и я
Следящее устройство для ко ггроля расстояния между люстовы.ун кранамм, включающее корпус с ОТКЛОНЯЮЩИЕ блoкo ; для гибкой связи, соеднненной с иротивовесом, отличающееся тем, что, с нелыо новышения точности работы, ротиво1;ес ньиюлнеи с кулачко.х, взанмодейст|ующнм с конневым выключателями, и снаб;-: ен зан1слкой для соедниения с гибко| | связью.
/.2Ш
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ВРАЩЕНИЯ СТРЕЛОВЫХ КРАНОВ | 1972 |
|
SU329117A1 |
| Ограничитель грузоподъемности крана | 1959 |
|
SU125659A1 |
| УСТАНОВКА ДЛЯ ПОТОЧНОЙ ОЧИСТКИ АНОДНЫХ ШТЫРЕЙ АЛЮЛ\ИНИЕВЫХ ЭЛЕКТРОЛИЗЕРОВ | 1965 |
|
SU177091A1 |
| УСТРОЙСТВО для ОБДУВА ТКАЦКИХ СТАНКОВ И ПРИМЫКАЮЩИХ К СТАНКУ ЗОН | 1971 |
|
SU294367A1 |
| ПРОТИВОУГОННЫЙ ЗАХВАТ ГРУЗОПОДЪЕМНОГО КРАНА | 1972 |
|
SU329113A1 |
| Кран для подъема и подачи грузов в оконный проем здания | 1988 |
|
SU1673500A1 |
| Кран для подъема и подачи грузов в оконный проем здания | 1990 |
|
SU1808809A1 |
| МОСТОВОЙ КРАН | 1969 |
|
SU247482A1 |
| УСТРОЙСТВО ДЛЯ УРАВНОВЕШИВАНИЯ СТРЕЛЫ ГРЕЙФЕРНОГО КРАНА | 1970 |
|
SU278065A1 |
| Башенный кран | 1988 |
|
SU1595786A1 |
