Изобретение относится к летательным аппаратам, в частности к аппаратам с маховыми движениями крыльев, называемыми орнитоптерами.
Известны орнитоптеры, содержащие подвижные крылья, механизм движения крыльев, двигатель и шасси.
Недостатком известных орнитоптеров является отсутствие передачи через рукоятки управления на руки пилота информации о нагрузках, положении крыльев.
С целью улучшения летних качеств орнитоптера в предлагаемом орнитоптере механизм передачи движения от рукояток пилота к крыльям выполнен в виде двух раздельных для правого и левого крыльев следящих систем, например, гидравлического типа, снабженных устройствами передачи усилий, воспринимаемых крыльями, на рукоятки управления следящими системами.
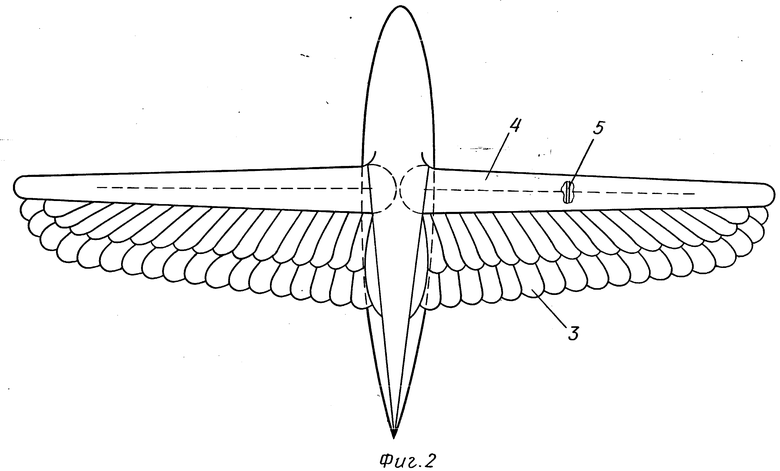
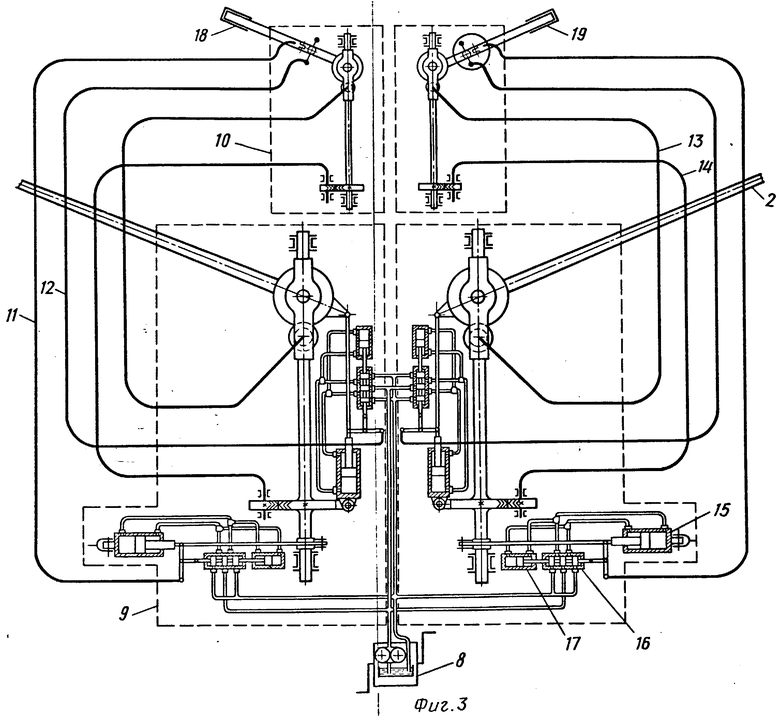
На фиг. 1 показан предлагаемый орнитоптер, вид сбоку и вид сзади; на фиг. 2 - то же, вид сверху; на фиг. 3 - схема механизма движения крыльев.
Предлагаемый орнитоптер Фетисова состоит из трехколесного велосипедного шасси 1, подвижных крыльев 2 с перьями 3 и обтекателями 4, прикрывающими силовые элементы 5 крыльев. В фюзеляже 6, прикрепленном к шасси, смонтирован механизм 7 движения крыльев.
Механизм движения крыльев (см. фиг. 3) может быть выполнен механическим или гидравлическим и разделен на механизмы мах-взмаха правого и левого крыла, каждый из которых включает следящие системы горизонтального и вертикального перемещения крыла, связанные с педальным устройством 8 шасси.
Привод 9 механизма движения крыльев связан с управляющим устройством 10 посредством прямых 11 и 12 и обратных 13 и 14 связей горизонтального и вертикального перемещений крыльев.
Вертикальное перемещение крыльев осуществлено от передаточного механизма 15, выполненного, например, в виде гидроцилиндра и золотника 16, а обратная связь обеспечена нагрузным устройством 17 автомата мускульного ощущения.
Управление полетом осуществляется посредством рукояток 18, приложенные мускульные усилия к которым вызывают излом в шарнирах 19 прямой связи. При отсутствии силового воздействия пилота на рукоятки отсутствуют сигналы рассогласования, отрабатываемые соответствующим крылом.
Продольная устойчивость орнитоптера обеспечивает горизонтальным перемещением крыльев, а поперечная - ассиметрией в работе крыльев при их перемещении.
Предлагаемое устройство обеспечивает улучшение летных качеств орнитоптера за счет передачи через рукоятки управления на руки пилота информации о нагрузках, положении и движении крыльев.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ДВИЖИТЕЛЕМ В ВИДЕ МАШУЩИХ КРЫЛЬЕВ | 2002 |
|
RU2217355C1 |
| ОРНИТОПТЕР | 2007 |
|
RU2378157C2 |
| МАХОЛЕТ | 2010 |
|
RU2451623C1 |
| СПОСОБ ПРИВЕДЕНИЯ В ДВИЖЕНИЕ МАШУЩИХ КРЫЛЬЕВ МАХОЛЕТА И МАХОЛЕТ | 2010 |
|
RU2450954C1 |
| БИПЛАН С МУСКУЛЬНЫМ ПРИВОДОМ | 2005 |
|
RU2302977C1 |
| Динамический инерционный махолет (ДИМа) | 2021 |
|
RU2779547C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2016 |
|
RU2624760C1 |
| МУСКУЛОЛЕТ ГОРШКОВОЙ | 2002 |
|
RU2253595C2 |
| ПУЛЬТ, СИСТЕМА И СПОСОБ РУЧНОГО УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ РЕГУЛИРУЕМОЙ ВЕЛИЧИНЫ ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА (ВАРИАНТЫ) "АРЖЕСАН" | 1996 |
|
RU2128600C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ВОЕННОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2012 |
|
RU2501700C1 |
Орнитоптер, содержащий подвижные крылья, механизм движения крыльев, двигатель и шасси, отличающийся тем, что, с целью улучшения летных качеств орнитоптера, механизм передачи движения от рукояток пилота к крыльям выполнен в виде двух раздельных для правого и левого крыльев следящих систем, например, гидравлического типа, снабженных устройствами передачи усилий, воспринимаемых крыльями, на рукоятки управления следящими системами.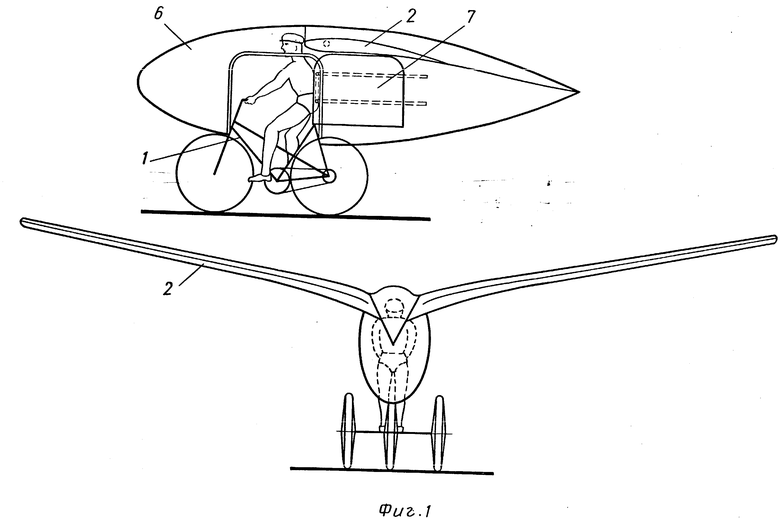
Орнитоптер, содержащий подвижные крылья, механизм движения крыльев, двигатель и шасси, отличающийся тем, что, с целью улучшения летных качеств орнитоптера, механизм передачи движения от рукояток пилота к крыльям выполнен в виде двух раздельных для правого и левого крыльев следящих систем, например, гидравлического типа, снабженных устройствами передачи усилий, воспринимаемых крыльями, на рукоятки управления следящими системами.
