Известны автоматические опрокидыватели для рудничных вагонеток, с электромотором для кругового вращения барабанного опрокидывателя и с ycjpoftством механизма для автоматического обслуживания его.
В пр1едлагаемом автоматическом опрокидывателе применены особые распределители, пропускающие в опрокидыва- тель только два вагона и задерживающие остальные, а также выпускающие из опрокидывателя два порожних вагона. Включение и выключение электрического тока осуществляется при помощи двух контактов, из которых один служит для пуска тока в соленоид, а другой-для включения электромотора, вращающего опрокидыватель.
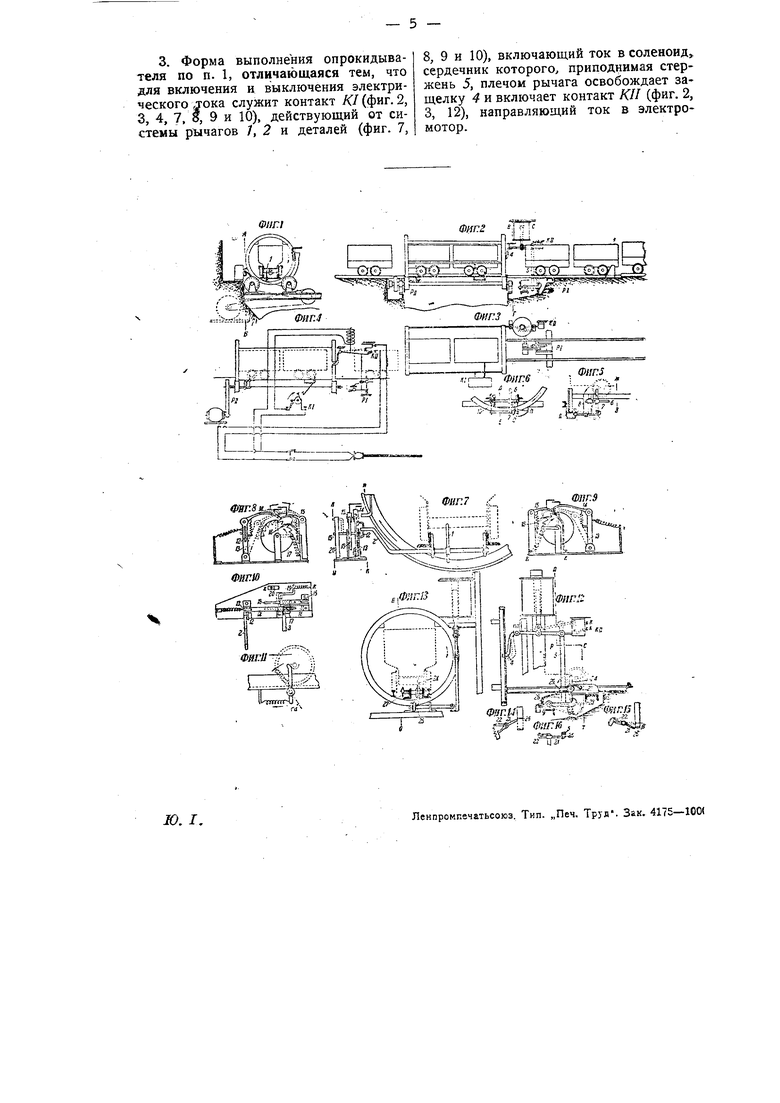
На чертеже фиг. 1 изображает разрез по линии БГ на фиг. 2; фиг. 2-разрез по линии АБ на фиг. 1; фиг. 3 - вид опрокидывателя сверху; фиг. 4-коммутационную схему включения электромотора и соленоида; фиг, 5 - разрез по линии Е на фиг. 6; фиг. 6-разрез по линии ЖЗ на фиг. 5; фиг. 7-вид опрокидывателя спереди; фиг. 8-разрез по линии fiK на фиг. 7, фиг. 9 - разрез по линии ММ на фиг. 7, фиг. 10 -вид сверху на контакт, включающий соленоид; фиг. 11-отклонение рычага опрокидывателя; фиг. 12 - разрез по линии
(135)
НО на фиг. 13; фиг. 13-разрез по линии ПРСТ на фиг. 12; фиг. 14, 15 и 16детали.
Предлагаемый опрокидыватель представляет собой обыкновенный барабанный опрокидыватель на два вагончика (фиг. 1 и 2) и может работать, как при расцепленных вагонетках, так и при сцепленных в партии, при чем в последнем случае сцепки вагончиков должны быть вращающимися. Перед опрокидывателем и сзади него, а также и на самом опрокидывателе делается такой уклон рельсовых путей (0,015 - 0,018), чтобы вагонетки с грузом, доставленные из-под забоя (в шахте) или выданные из шахты, (на поверхности) сами катились вниз к опрокидывателю. Перед самым опрокидывателем они задерживаются и в нужный момент только две груженые вагонетки входят в него; порожние вагонетки, если они были в опрокидывателе, в это время выходят из него, а остальные груженые вагонетки, стоящие перед опрокидывателем,, задерживаются. Как только при входе второй, по счету вагонетки в опрокидыватель, включится мотор и начнёт вращать опрокидыватель, вагонетки выгружаются. При установке опрокидывателя в первоначальное положение мотор моментально выключается. В дальнейщем операции
вновь повторяются, а именно: порожние две вагонетки выходят из опрокидывателя, груженые две вагонетки входят в него, а остальные груженые вагонетки задерживаются, мотор включается, опрокидыватель вращается, вагонетки выгружаются и т. д.
Все эти операции производятся автоматически следующими ириспособлеНИЯД1И.
Впуск груженых вагонеток по две (попарно) в опрокидыватель и задерживание перед ним остальных производится распределителем (PI), находящимся на пути перед опрокидывателем (фиг. 2). Выпуск разгруженных вагонеток из опрокидывателя и задержка вошедших в него груженых вагонеток производится распределителем П -(РП), помещенным на самом опрокидывателе.
Включение и выключение мотора, приводящего в движение опрокидыватель, осуществляется помощью контакта АГ/ и контакта А7/.
Распределитель PI (фиг. 2,3, 12 и 13) состоит из звезды 24, имеющей четыре спицы, при чем на конце одной из спиц прикреплен сбоку палец 25. Последний может упираться в крючковидный кулак 23, и таким образом звезда не сможетповорачиваться по направлению, указанному стрелкой до тех пор, пока палец не освободится из-под кулака. Как только кулак 23 повернется вниз вокруг своей оси на угол; р, звезда благодаря приливу 29 на спице моментально повернется вокруг своей оси по направлению стрелки (фиг. 12) на некоторый угол. Вагонетки, идущие к опрокидывателю, своими, осями производят вращение звезды. С того момента, как звезда своим пальцем 25 будет освобождена из-под, кулака 23, через нее могут пройти к опрокидывателю только две вагонетки (четыре оси), а третья вагонетка (пятая ось по Очагу), вместе с остальными вагонетками, стоящими перед опрокидывателем, задержатся упомянутой звездой, так как ее палец 25 упрется в кулак. Деталь 2S представляет собой гибкую Пластинку и служит для того, чтобы при отсутствии, вагонетки перед звездой ив момент освобождения пальца 25 из-под кулака, звезда смогла повернуться только, на- небольщой угол, лищь бы палец
выщел из-под кулака; эта пластинка поддерживает тяжелую спицу с приливом 29 и не дает ей сразу упасть. При отсутствии упомянутого прилива 29, звезда повернулась бы сразу на 90, что нарущило бы „счет осей вагонеток. Движение вагонеток свободно преодолевает небольщую упругость пластинки.. Для того, чтобы звезда не поворачивалась в противоположную сторону, когда спица с приливом 29 будет находиться на противоположной стороне, служНт собачка, укрепленная на оси звезды с храповичком 27. Ось звезды должна свободно вращаться и укрепляться. Кулак 23 вращается вместе со своей осью, которая выходит наружу пути (фиг. 13) и имеет загнутый конец 22 под прямым углом (фиг. 14, 16). Ось, вместе с кулаком 23 может поворачиваться на угол р (фиг. 12 и 15) помощью рычага 2/, надетого на конце этой оси. Стержень 5 своим концом 26 нажимает на правое плечо рычага 2/, левое плечо которого поднимает загнутый конец оси 22 вверх, которая вместе с кулаком 23 поворачивается. Как только кулак повернется вниз на угол р, рычаг 2/ освобождается из-йод конца 26 стержня, и кулак помощью находящейся под ним пружины становится в первоначальиое положение; такое же положение принимают конец оси 22 и рычаг 2/, стержень же 5 со своим концом 26 будет оставаться ниже рычага (пунктир на фиг. 14). Стержень 5 также приподнят вверх, выше рычага 2/; конец 26 стержня при этом на, своем пути отклонит вверх плечо рычага 2/, которое после неко торого поворота освободится из-под конца 26, и помощью пружины примет свое первоначальное положение (фиг. 14); конец стержня 26 также может оставаться выше его. Стержень 5 приподнят тогда, когда опрокидыватель выйдет из своего первоначального положения, и начинает вращаться, как только опрокидыватель остановится, стержень 5 моментально падает вниз, своим концом 26 ударяется о рычаг 2/, кулак 23 поворачивается на угол р, палец 25 звезды освобождается из-под кулака и вагонетки входят в опрокидыватель.
Распределитель РП (фиг. 2, 5 и 6-) состоит также из звезды 6 с че
тырьмя спицами, при чем на одной в конце и сбоку палец 7, упирающийся в кулак 9, а. на другой- прилив 8, придающий ей большую тяжесть по сравнению с другими спицами. Деталь JO представляет собачку с храповичком, сидящим на оси звезды. Назначение этой звезды такое же, как и в распределителе PI, а именно: две вагонетки (порожние) могут свободно пройти, а третья задерживается о звезду своей первой осью. В момент остановки опрокидывателя вагонетки освобождаются из-под звезды, благодаря особо изогнутой скобе 7 /, укреплённой неподвижно вне опрокидывателя таким образом, что кулак (шчажный) 9 при остановке опрокидывателя отклоняется на некоторый угол; при этом палец 7 звезды освобождается, а кулак сейчас же устанавливается пружиной в первоначальное положение.
Контакты Л7 и /С// являются контактами (рубильниками) для включения и выключения электрического тока (фиг. 4). Действие контакта / заключается в следующем (фиг. 11). На опрокидывателе имеется рычаг / (фиг. 7 и 1), который осями вагонеток может отклоняться на угол а (рис. 11) и помощью пружины становится в первоначальное положение. На угол а поворачивается и изогнутый конец 2 его оси (фиг. 7), выходящий наружу опрокидывателя и при своем отклонении упирающийся в скобу 72 пластинки 75, имевдщей наверху на щарнире собачку /4. Пластинка 75, вместе с остальными своимидеталями, укрепляется возле опрокидывателя так, что вместе с собачкой J4 отклоняется концом оси 2 рычага на тот же угол, как и рычаг / (фиг. 9 и 8, пунктирное положение). Освободившись изпод конца 2 оси рычага, она помощью пружины лриходит в первоначальное положение; собачка 74 повернет при том храповое колесо 7 лишь на один зубец, так как изогнутая с одного края пластинка J6, имеющая на этом конце вырез для прохождения храповика, не даст собачке 74 захватить более одного зубца. Вполне понятно, что если через рычаг / пройдут четыре оси двух вагонеток, то храповое колесо повернется помощью собачки М вместе со своей
осью на четыре зубца (на 90°) по направлйнию стрелки.. Для того, чтобы храповое колесо 77 преждевременно не стало в первоначальное положение,, что заставляет сделать цружина, на этой оси прикреплено другое храповое колесо JS (фиг. 10 и 9) с такими же самыми зубьями, как и на первом, удерживаемое от вращения в обратном направлении собачкой 75. Когда вторая вагонетка войдет в опрокидыватель и его вторая ось, повернув рычаг 7, освободит последний, собачка J4, захватив четвертый (последний) зубец храповика 77, Станет в свое первоначальное положение. Тогда храповое колесо 77 будет повёрнуто на 90, и конец его оси J9 соприкоснется с гибкой пластинкой 20 (фиг. 9 и 10), вследствие чего образуется между ними контакт, и ток может пройти между зажимами /С и /С.
Ток между зажимами /С н АГ выключается в начале вращения опрокидывав теля помощью укрепленного на опрокидывателе пальца 3 (фиг. 7 и 10), который приподнимает вверх собачки /5 и Т4 помощью укрепленных на них изогнутых стержней; храповые колеса 17 и /5, освободившись из-под собачек посредством пружины, прикрепленной к концу оси J9, становятся в первоначальное положение. Собачки 74 и 75 после некоторого поднятия (пунктир фиг. 8 освобождаются также из-под пальца 3 опрокидывателя при дальнейшем вращении его и падают на свои прежние места. От образовавшегося контакта К/ (фиг. 4) ток от сети входит в соленоид, помещенный перед опрокидывателем возле распределителя PI (фиг. 2,12 и 13), при чем сердечник втягивается соленоидом С. Последний шарнирно прикреплеа к коленчатому рычагу, вращающемуся на горизонтальной оси, на одном конце своем имеющему изогнутую защелку 4, входящую в круглое отверстие на окружности лобовой стороны барабана; на другом конце рычага шарнирно прикреплен стержень 5, и имеется клеммы для контакта тока электромотора. Такш образом, когда соленоид С будет находиться под током, то сердечник его будет втянут, защелка 4 выйдет из отвер стия опрокидывателя, другой же конец. рычага вместе со стержнем 5 приподнкзиется (пунктир фиг. 12), и между концом рычага и неподвижной клеммой, укрепленной вне этого устройства, образуется контакт КП для включения тока в мотор.
Для обоих контактов должны быть соответствующие рубильники, которые автоматически включаются и выключаются описываемыми деталями. Благодаря получившемуся контакту КП ток от внешней цепи входит в электромотор и помощью передачи заставляет вращаться опрокидыватель (фиг. 1 и 6). Как только последний от своего первоначаЛьного положения повернется на некоторый угол, ток в соленоиде может отсутствовать, и защелка 4 рычага, выйдя, из отверстия опрокидывателя, будет упираться и скользить по борту лобовой стороны опрокидывателя. Рычаг вместе-со стержнем 5 будет оставаться на месте, а, следовательно, будет соблюден контакт для тока мотора до тех пор, пока опрокидыватель не станет в первоначальное положение. В последний момент защелка 4 рычага благодаря тяжелому стержню .5, войдет в отверстие опрокидывателя, стержень 5 упадет вниз,, контакт КП разомкнется и мотор остановится.
Вся работа опрокидывателя сводится к следующему (фиг. 4). Помощью распределителя / в опрокидыватель входят только две вагонетки, остальные же задерживаются. Вошедщие в опрокидыватель груженые вагонетки задерживаются распределителем Р/Л Как только вторая вагонетка войдет в опрокидыватель, образуется контакт KI в депи тока соленоида, сердечник его при этом втягивается, защелка 4 рычага выходит из отверстия опрокидывателя, стержень 5 поднимается вверх, образуется контакт // Б цепи тока, и мотор начинает вра-, щать опрокидыватель. При незначительном повороте опрокидывателя от своего первоначального положения, благодаря пальцу 3, укрепленному на опрокидывателе, и описанному выше приспособлению контакта /С/, впуск тока в соленоид, вследствие размыкания контакта, прекращается, и соленоид до нового контакта находится под током, а защелка рычага, вышедщего из отверстия при вращении опрокидывателя, упирается и
скользит по левой стороне окружностиопрокидывателя; стержень 5 остаётся на месте, а контакт Л7/ таким образомостается сомкнутым для тойа мотора, вращающего опрокидыватель. Когда опрокидь1ватель сделает полный оборот и придет в первоначальное положение, защелка 4 рычага войдет в отверстие опрокидывателя. Последний остановится и в этот момент разомкнется помощью контакта КП (рубильника) ток мотора, стержень 5 упадет вниз, ударит своим концом 26 рычаг 21, который повернет конец 22 оси и самую ось с кулаком 23 (фиг. 12) на угол , палец 25 звезды 24 освободится, и вагонетки начнут посту пать в опрокидыватель; порожние же вагонетки, помощью распределителя РЦ, будут в это время выходить из опрокидывателя. Дальше такие операции будут снова повторяться.
Предмет изобретения.
1.Автоматический опрокидыватель; для рудничных вагонеток с электромотором для кругового вращения барабанного опрокидывателя и с устройством механизма для автоматического обслуживания опрокидывателя, отличающийся тем, что для пропускания двух вагонеток в опрокидыватель и задерживания остальных служит распределитель Я/,, состоящий из звезды 2(фиг. 2, 3, 12 и 13) .с четырьмя спицами, с приливом 2Я с пальцем 25, упирающимся в кулак 23,. шарнирно прикрепленный к коленчатому рычагу, задевающему конец 25 стержня 5,. присоединенного помощью рычага с защелкой 4 к сердечнику соленоида, с храповичком 27 на оси звезды и с деталью 26, притормаживающей поворот звезды 24.
2.Форма выполнения опрокидывателя по п. 1, отличающаяся тем, что для выпускания двух порожних вагонеток из опрокидывателя служит распределитель Я// (фиг. 2, 5 и 6), состоящий также иззвезды с четырьмя спицами, с приливом 8, с пальцем 7, упирающимся в кулак 9, с храповичком /О, с кулаком Я ударяющимся в момент остановки опрокидывателя во внешнюю скобу // и освобождающим палец 7.
3. Форма выполнения опрокидывателя по п. 1, отличающаяся тем, что для включения и выключения электрического ,уока служит контакт KI (фиг. 2, 3, 4, 7. о, 9 и 10), действующий от системы рычагов 7, 2 и деталей (фиг. 7,
8, 9 и 10), включающий ток в соленоид, сердечник которого, приподнимая стержень 5, плечом рычага освобождает защелку 4 и включает контакт /С// (фиг. 2, 3, 12), направляющий ток в электромотор.
| название | год | авторы | номер документа |
|---|---|---|---|
| Цепной толкатель | 1962 |
|
SU150603A1 |
| ПРИЕМНАЯ ПЛОЩАДКА НАДШАХТНОГО ЗДАНИЯ С ОБМЕНОМ ВАГОНЕТОК | 2007 |
|
RU2338882C1 |
| Гидравлический толкатель вагонеток | 1977 |
|
SU1033775A1 |
| ПРИЕМНАЯ ПЛОЩАДКА НАДШАХТНОГО ЗДАНИЯ С ОБМЕНОМ ВАГОНЕТОК | 2007 |
|
RU2352515C1 |
| ПРИЕМНАЯ ПЛОЩАДКА НАДШАХТНОГО ЗДАНИЯ С ОБМЕНОМ ВАГОНЕТОК | 2007 |
|
RU2336418C1 |
| ПРИЕМНАЯ ПЛОЩАДКА НАДШАХТНОГО ЗДАНИЯ С ОБМЕНОМ ВАГОНЕТОК | 2007 |
|
RU2329382C1 |
| Боковой опрокидыватель шахтных вагонеток | 1971 |
|
SU478774A1 |
| Устройство контроля положения шахтных вагонеток и стопоров в опрокидывателе | 1959 |
|
SU125187A1 |
| Опрокидыватель шахтных вагонеток | 1980 |
|
SU893773A1 |
| Перестановочная платформа | 1960 |
|
SU133914A1 |