Предлагаемое изобретение относится к Электромеханическим следящим системам и может найти применение в зубо-обрабатывающих и копировально-фрезерных станках, в устройствах наведения, в системах дистанционного управления перемещениями и т. д.
Известны следящие системы, содержащие сельсин-задатчик, усилитель-преобразователь, блок сравнения, исполнительный двигатель и сельсин-датчик обратной связи по положению.
Как известно, величина выходного сигнала сельсина в трансформаторном режиме или вращающегося трансформатора (ВТ) зависит от амплитуды напряжения источника возбуждения, от температуры окружающей среды, от магнитных свойств материала данного образца сельсина или ВТ.
Кроме того, сигнал сельсина при нулевом рассогласовании не равен нулю, а имеет конечное значение.
Все эти факторы влияют на точность измерения сигнала рассогласования. Поэтому, известные системы непрерывного управления с сельсинами (или ВТ) обладают ограниченной точностью и не могут быть исиользованы при построении систем с высокими коэффициентами добротности.
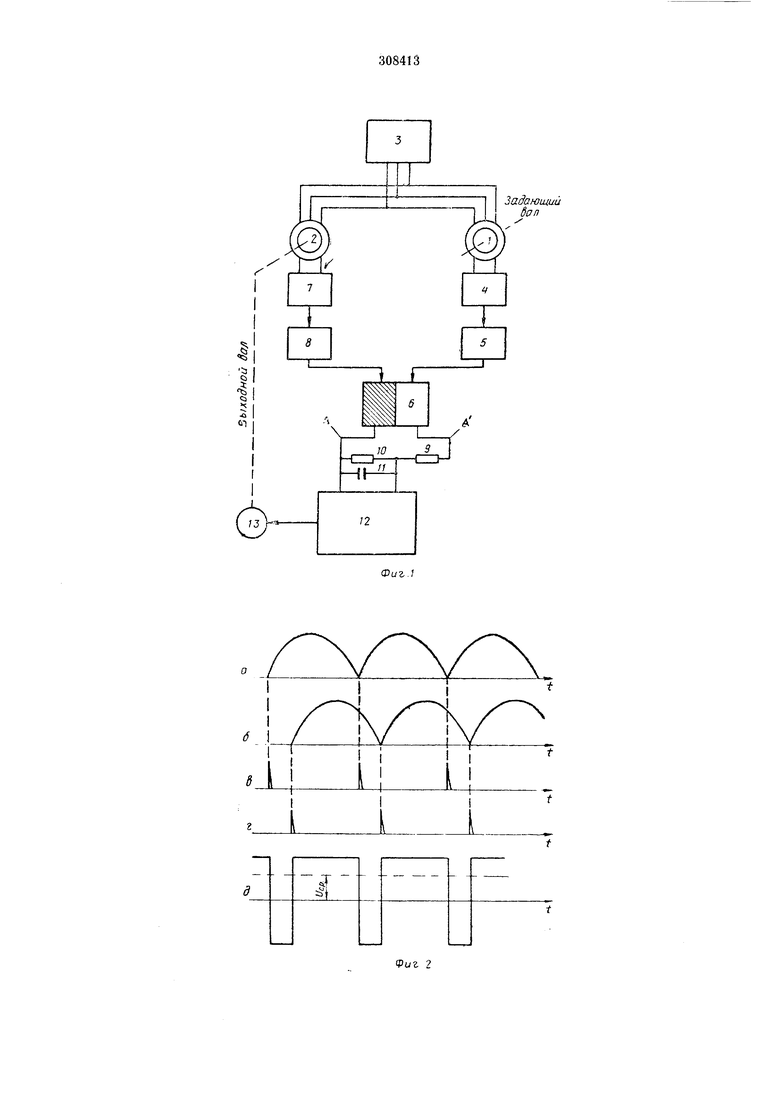
входы которого соответственно через выпрямители и преобразователи подключены к сельсину-задатчику и сельсину-датчику обратной связи, а выход - через фильтр ко входу усилителя-преобразователя, и основана на передаче информации о положении вала двигателя (или рабочего органа) с помощью прямого преобразователя углового рассогласования в электрический импульсный сигнал,
модулированный по фазе. Уровень сигнала рассогласования в ней не зависит от амплитуды сигналов, снимаемых с задатчпка и с датчика обратной связи, а построением схемы обеспечивается независимость сигнала
рассогласования от частоты источника возбуждения. Кроме того, предлагаемая система не имеет фазочувствительного выпрямителя, который в известных системах при малых рассогласованиях является дополнительным источником помехи.
Задатчик и датчик обратной связи в предлагаемой системе работают на высоких частотах, и фильтр, стоящий на выходе схемы сравнения, нрактически не снижает быстродействия системы.
Перечисленные преимущества предлагаемой системы по сравнепию с известными позволяют создать достаточно простую следящую систему с высоким коэффициентом добСоставитель В. А. Чистов Редактор Ё. ГончарТехред Е. Борисова Корректор В. И. Жолудевй
Задающий боп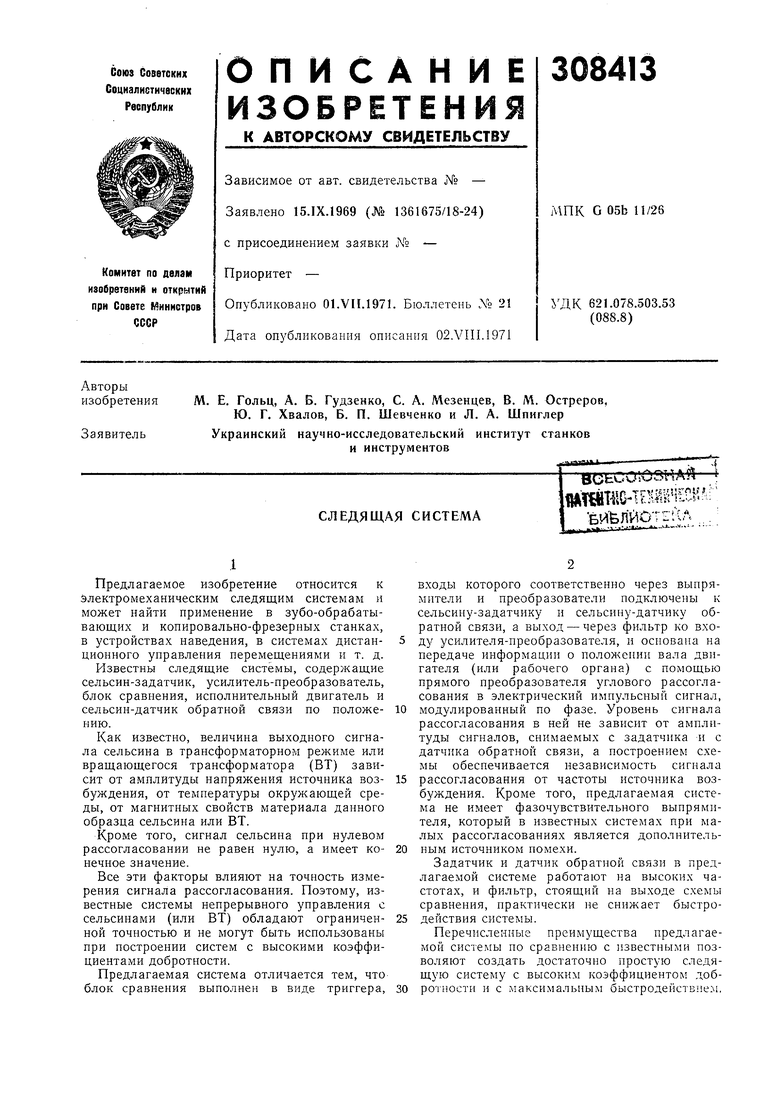
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий вентильный электропривод | 1982 |
|
SU1241400A1 |
| МНОГОКАНАЛЬНОЕ УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ УГЛА | 1971 |
|
SU312291A1 |
| Следящая система | 1975 |
|
SU555377A1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 2012 |
|
RU2482596C1 |
| Следящий привод | 1977 |
|
SU682871A2 |
| Следящий электропривод | 1980 |
|
SU903804A1 |
| Устройство для регулирования скорости электропривода постоянного тока с двумя двигателями | 1975 |
|
SU550751A2 |
| НЕЛИНЕЙНЫЙ ЭЛЕМЕНТ | 1971 |
|
SU291379A1 |
| Следящий привод | 1977 |
|
SU684507A2 |
| АВТОРУЛЕВОЙ, РЕАЛИЗУЮЩИЙ ПРОПОРЦИОНАЛЬНО- ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ ЗАКОН УПРАВЛЕНИЯ | 1968 |
|
SU213943A1 |