Известны авторулевые, в 1которых закон управления реализуется на злектр.омеханических элементах.
Предложенный авторулевой отличается от известных тем, что ъ нем установлены многофункциональные цифровые интеграторы. Это повышает точность удер|Жан.ия судна на заданном курсе.
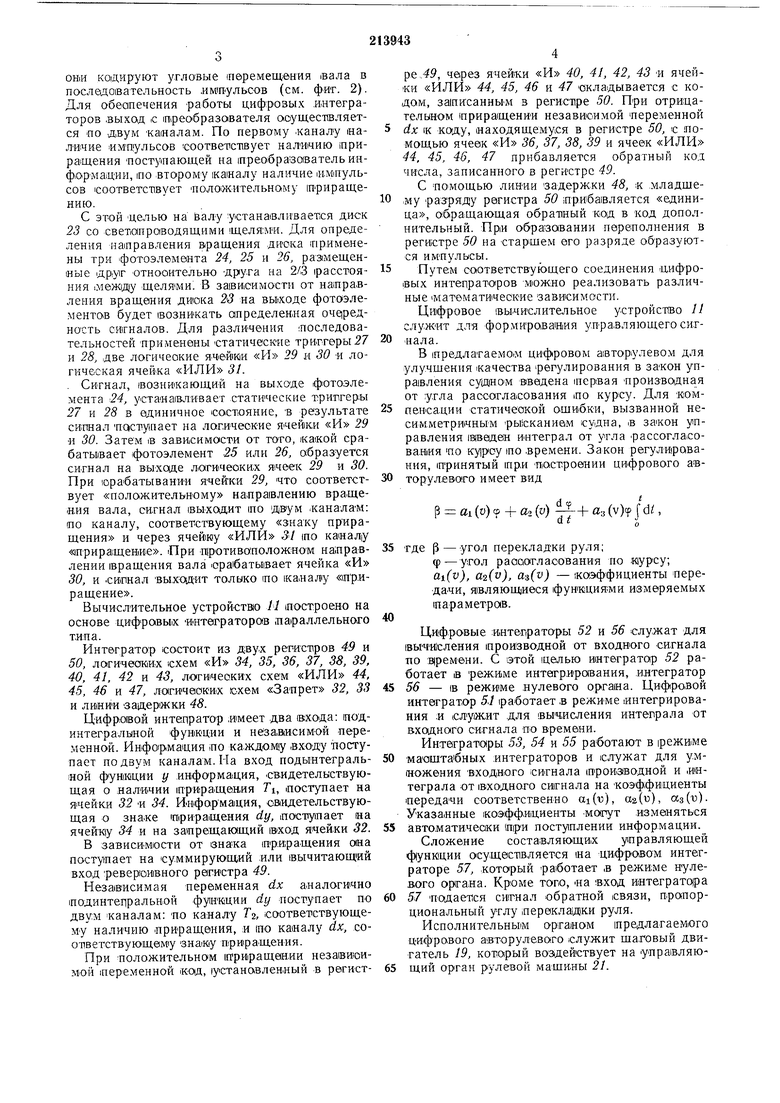
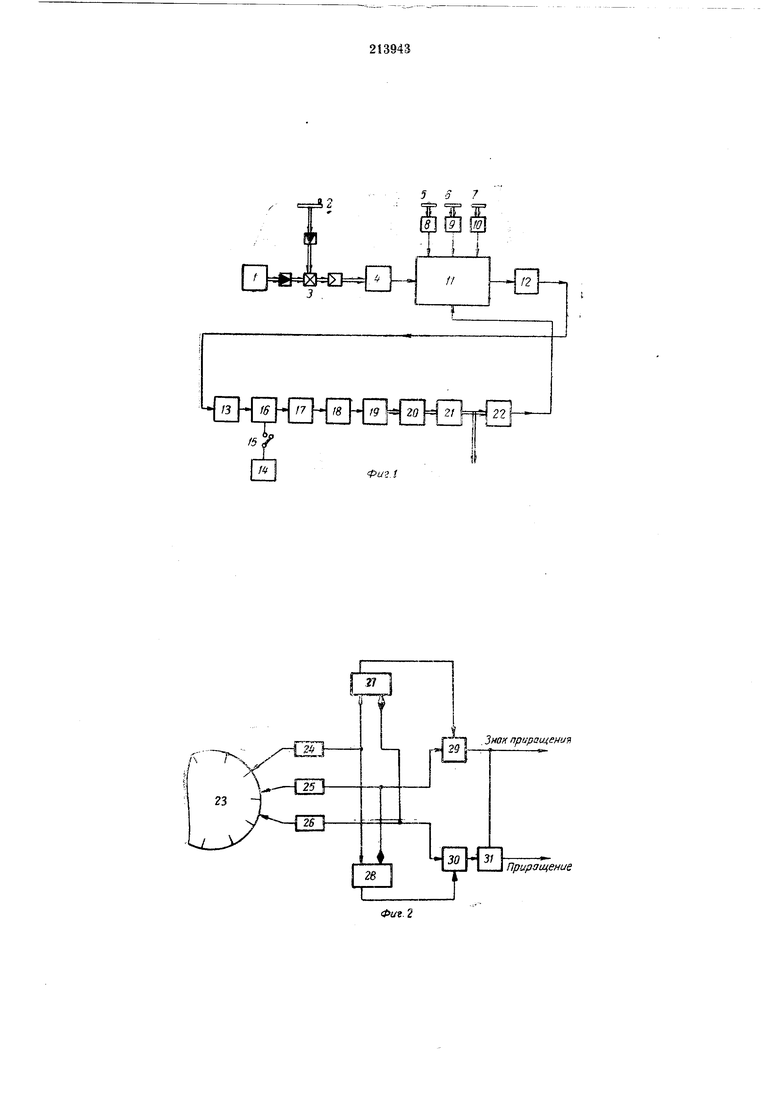
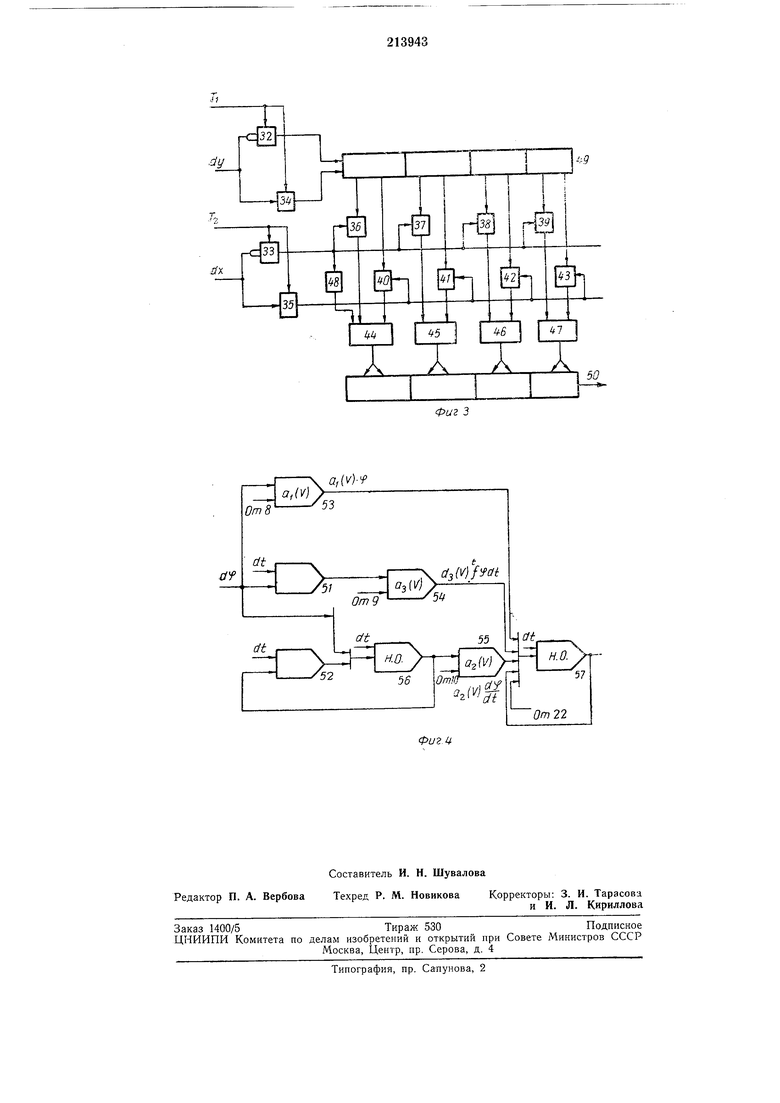
На фиг. 1 изображена функциональная схема цифрового авторулевого; на фиг. 2 - функциональная схема преобразователя вал- цифровая Последовательность имлульсов; на фиг. 3 - фу1нкциональная схема цифрового интегратора; на фиг. 4 - функциональная схема вычислительного устр:ойст1ва циф;рового авторулевого.
На чертежах 1приняты следующие обозначения; 1 - гирокомпас; 2 - штурвал; 3-механический дифференциал; 4 - .преобразователь вал - цифро1вая последовательность импульсов; 5, 6 ,и 7 - рукоят1К1и (штурвальчики); S, 9 и 10 - преобразователи (Вал - цифровая последовательность импульсов; }} - цифровое вычисллтельное устройство; 12 - преобразователь цифровых последавательностей импульсов; 13 - реверсивный регистр; 14 - генератор импульсов; 15 - переключатель; 16- схема управления; 17 - усилитель; 18 - коммутатор шагавого двигателя; 19 - шаговый двигатель; 20 - редуктор; 21 - рулевая .машина; 22 - преобразователь вал - цифро(Вая последовательность «мтульсов; 23 - диюк с светопров-одящими щеля-ми; 24, 25 .и 26 - фотоэлементы; 27 vi 28 - статические триггеры; 29 и 30 - логичеакие ячейки 31 -
логическая ячейка 32, 33 - логические ячейки запрета; 34, 35, 36, 37, 38, 39, 40, 41, 42 и 43 - логические ячейки 44, 45, 46 и 47 - логические ячей:ки 48 - линия задержки; 49 -я 50 - регистры; 51 «52 -
цифровые интегратары, |ра|ботаюш,ие .в режиме интегр11рован|Ия; 53, 54 .и 55 - цифровые интеграторы, работающие в режиме масштабных интеграторов; 56 и 57 - цифровые интеграторы, работающие в режиме нулевых органов.
Ра ботает цифровой авторулевой следующим образом.
Гирокомпас / определяет угол рассогласования по «урсу судна. Штурвал 2 служит для работы авторулевого в режиме следящего управления и для .ввода разовых поправок в режиме автоматического управления. Механический дифференциал 3 осуществляет сложение углов поворота вала гирокомпаса и штурвала. Поскольку вычислительное устройство авторулевого работает на основе цифровых интеграторов, то поступающую информацию необходимо представить в (виде цифровой последовательности имнульсов. С этой целью в авторулевом применены преобразо|Ватели 4, 8, 9, 10 и 22. Кроме того.
они кодируют у.гловые шеремещения (вала в последовательность .импульсов (см. фиг. 2). Для обеапечения работы цифровых интеграторов .выход с треобразователя аоущест1вляется по двум каиалам. По первому .каналу наличие «мПульсов соответствует наличию ириращения поступающей на треобразаватель информации, 1ПО второму 1ка1налу наличие 1НМ1пульсов соответствует поло жительнаму триращению.
С этой Целью на валу устанавливается диск 23 со свеТ|01праводящими щеля:мй. Для определения направления вращения диока трименены три фотоэлемента 24, 25 и 26, раэмещениые друг отнооительно друга на 2/3 ipaccTOHния .меж|Д|у В за|ви1симосги от направления вращения диюка 23 на вылоде фотоэлементов будет 1возникать апределениая оче1редность сигналов. Для различения :последовательностей применены статические триггеры27 и 28, две логические ячейиси «И 29 и 30 -и логичб.ская ячей.ка «ИЛИ 31. . Сигнал, 1возни1каюш.ий на выходе фотоэлемента 34, .ливает статические тритгеры 27 н 28 в единичное состояние, в результате сипнал поступает на логические ячейпси «И 29 и 30. Затем IB зависимости от того, какой срабатывает фотоэлемент 25 или 26, образуется си.гнал на выходе лаги1чеоки.х ячеек 29 и 30. При срабатывании ячейки 29, что соответствует «положительному направлению вра.щейия вала, сигнал юы-хадит ino двум .каналам: по каналу, соответствующему «знаку приращения и через ячейиу «ИЛИ 31 то каналу «приращевие. При щротивоположном на1правлении вращения вала срабатывает ячейка «И 30, и си1пнал ВЫХОДИТ только ino ка.налу «1пр.иращение.
Вычислительное устрой.ств10 11 шосгроено на основе цифровые интеграторов параллельнооО типа.
Интегратор состоит из двух регистров 49 и 50, логических схем «И 34, 35, 36, 37, 38, 39, 40, 41, 42 и 43, логических схем «ИЛИ 44, 45, 46 и 47, лагичеокил схем «Запрет 32, 33 и ЛИ1НИИ задержки 48.
Цифровой интепратор .имеет .два входа: подинтегралыной функции и независимой пере.менной. Информация по ка.ждо. входу поступает по двум каналам. На вход подыНтеграль«ой фунтции у информация, св.идетельствующая о наличии при ращения Ti, поступает на ячейки 32 и 34. Информация, оВ|Идетельствующая о знаке триращения dy, посту1пает на ячейюу 34 и на за)прещаю|.щий юход ячейки 32.
В зависИМости от знака 1Прира.щения ана постушает на суммирующий .или вычитающий вход реверонвного регистра 49.
Независимая переменная dx аналогично 1подинтег1ральной функции dy поступает по двум каналам: по каиалу Т, соответствующему наличию приращения, и то каналу dx, соответствующему знаму прираЩения.
ре .49, через ячейки «И 40, 41, 42, 43 и ячейки «ИЛИ 44, 45, 46 и 47 складывается с кодом, заиксаннЫМ в регистре 50. При отрицательном (приращениИ независимой переменной dx IK коду, находящемуся в регистре 50, с помощью ячеек «И 36, 37, 38, 39 и ячеек «ИЛИ 44, 45, 46, 47 прибавляется обратный код числа, записанного в регистре 49.
С помощью линии задержки 48, « .младще.му разряду регистра 50 прибавляется «единица, обращающая обратный код в Код дополнительный. При образовании переполнения в регистре 50 на старщем его разряде обра.зуются импульсы.
Путем соответствующего соединения цифровых интепраторов можно реализовать различные Математические зави1симасти.
Ци)фровое вычислительное устройст1во // служит для формираваиия управляющего сиг.нала.
В 1предлагаемО|М цифровом а1вторулевом для улучщения 1качества регул.ирования в закон управления судном введена атервая производная от угла рассогласования ino курсу. Для :компенсации статической ощибки, вызванной несим,метричньгм рьИсканием судна, в закон управления 1В1вадвн ИНтеграл от угла рассогласова.Н|ИяПО Kyipoy 1ПО .времени. Закон регулирования, принятый при -построении цифрового авторул. имеет вид
ai(o)cp + a,(y) +a3(v)«(d/,
тде р - угол перекладки руля;
Ф-угол раааагласования по иурсу; ai(v), az(v), a(v) - коэффициенты передачи, являющиеся функциями измеряемых параметров.
Циф.ровые интеграторы 52 и 56 служат для вычисления производной от входного сигнала по :в|ремени. С этой щелью интегратор 52 работает в режиме интегрирования, .интегратор 56 - в режиме нулевого органа. Цифровой интегратор 5.1 работает в режиме интегрирования :и (СЛужит .для вьгч,исления интепрала от входного сигнала по времени.
Интеграторы 53, 54 и 55 работают в режиме маоштабных интеграторов и служат для умножения ВХОДНОГО сигнала ираиаводной и интеграла от входного си1гнала на КОЭффициенты передачи соответственно ai(t)), ааСи), аз(г)). Указанные 1КОэфф.И|Циенты .могут .изменяться автомати.чеаки (при поступлении информации.
Сложение составляющих управляющей функщии осуществляется на цифрОвом интеграторе 57, .который работает в режиме нулевого органа. Кроме того, на вход интегратора 57 Подается сигнал обратной связи, пропорциональный углу перекладки руля.
Исполнительным органом предлагаемого цифрового авторулевого служит ща.говый двигатель 19, который воздействует на управляющий орган рулевой МЕШЕНЫ 21.
Управляется рУ-т вал машина с-педующим образом. Последо;вательность импульсов, выработанная IB |Вычислительном уст1ройстве tl, ластупает на шреобразователь 12 ino дюу.м каналам: ло канаоТу, соответствующему наличию О|рираш,ения, и то «аналу, соответствующему наличию толожительного приращения.
Преобразователь 12 рещает логические схемы «И и «Запрет. На выходе преобразователя информация будет выходить по двум канала м: по каналу, соответствующему лолоЖИтельному ириращвпию, « по «аналу, соответст1аующему отрицательному шриращению. Полученные последовательности имтаульсов поступают соответственно иа сум:мирующ«й или вычитающий 1ВХОДЫ реверсиБного регистра 13. При наличии кода в этом регистре .схема управления 16 Пропускает серию имшульсов от генератора тактовых илтульсов на злектроиный усилитель 17. Далее имшульсы поступают к коммутатору 18 шагового двигателя. Последний управляет вращением шагОВого двигателя 19, вал которого через редуктор 20 соединен с ионолнительнЫМ органом .рулевой .машины.
На выходном валу рулевой машины -стоит преобразователь вал - цифровая Последовательность 22. Эта цифровая последовательность поступает на цифровой интегратор 57 вычислительного устройства.
Предлагаемый -цифровой авторулевой работает в трех режимах - авто1матического, следящего И (простого управления.
В режиме автоматического управления вал принИМающего сельсина гироко.мласа / через механический дифференциал 3 соединен с преобразователем 4. На выходе преобразователя 4 вырабатывается 1последовательность импульсов, «скорость которой будет 1ироа10рц)- ональна углу рассогласования по -курсу.
Цифровая информащия с указанного преобразователя поступает в вычислительное устройство -11, где формируется управляющий сигнал.
Коэффициенты передачи ai(v), a-2(v), a.() вводятся вручную с шо.мощью рукояток 5, 6, 7 и Преобразователей 8, 9, 10 или автоматически от датчиков, измеряющих параметры движения судна. Вычисленная управляющая функция через преобразователь 12 поступает на реверсивный регистр 13. При наличии отличпой от нуля инфор.мации в реверсивном регистре 13 через схему управления 16 и усилитель 17 и.мпульсы от генератора поступают «а ком.мутатор щагавого двигателя. Ком.мутатор щагового двигателя 18 управляет вращением шагового двигателя 19, который через редуктор 20 поворачивает у:П-ра1Вляющий орган рулевой мащины 21.
Сигнал обратной связи образуется с пойощью преобразователя 22 я поступает в вычислительное уСТрОЙ:СТВО //.
Работа :цифро,вого авторулевого в режиме следящего управления отличается от режима автоматического управления только тем, что угол рассогласова ния .по курсу вводится вручную с помощью штурвала 2 и через механический дифференциал 3 поступает к преоб-разователю 4.
В режиме простого управления им1п-ульсы от генератора синхронизирующих импульсов 14 через перекчлючатель 15 непосредственно через схему управления 16 поступают на усилитель 17. Далее управление рулев-ой 1ащиной
осуществляется liaii в режи.ме автоматического управления. В режиме простого управления вычислительное устройство в работе не участвует.
Предмет изобретения
АвтОрулбвой, реализующий пропорциейально-интегргль; 0-дифференциальный за.кон управления,. сОДержаш,;ИЙ входные и вы.ходные
преобразо1вател-и вал - цифра, датчики коррекции с преобразователями, шаговый двигатель со схемой управления, реверсивный регистр и рулевую машину, отличающийся тем, что, с целью повышения точности удержания
судна на зада.вно.м курсе при волнении, ветре и других мешающих факторах, обеспечения воз южнасти плавной коррекции курса при одно1вреМенно.м упрощении схемы и повышении ее надежности, в нем установлены многофункциональные цифровые интеграторы и выход входного преоб|ра:зователя вал - цифц.а Подключен параллельными связями к трем цепям, образованным соответственно цифроBbiiM интегратором, работающим в режи.ме
масштабного интегрирования, последовательным соединением цифрового интегратора, работающего в режиме интегрирования, и цифрового интегратора, работающего IB реЖ|Име масщтабного интегрирования, и последовательныл соединением цифрового интегратора, работающего IB режиме нуль-органа, и цифрового интегратора, работающего в режиме масщтабного интегрирования, и КО вторым входаМ каждого масштабного интегратора подключены преобразователи датчиков коррекции, а вы.ходы всех масщтабных интеграторов через сум .матор подключены к цифровому интегратору, работающему в режиме нуль-орга1на, причем |к сумматору подключен и выходной (преобразОВатель,. а выход нуль-органа через преобразователь и реверсивный регистр подсоединен к схеме управления шагового
двигателя, изменяющего положение задатчика рулевой .машины, на выходном валу которой
размещен выходной преобразователь.
Фа.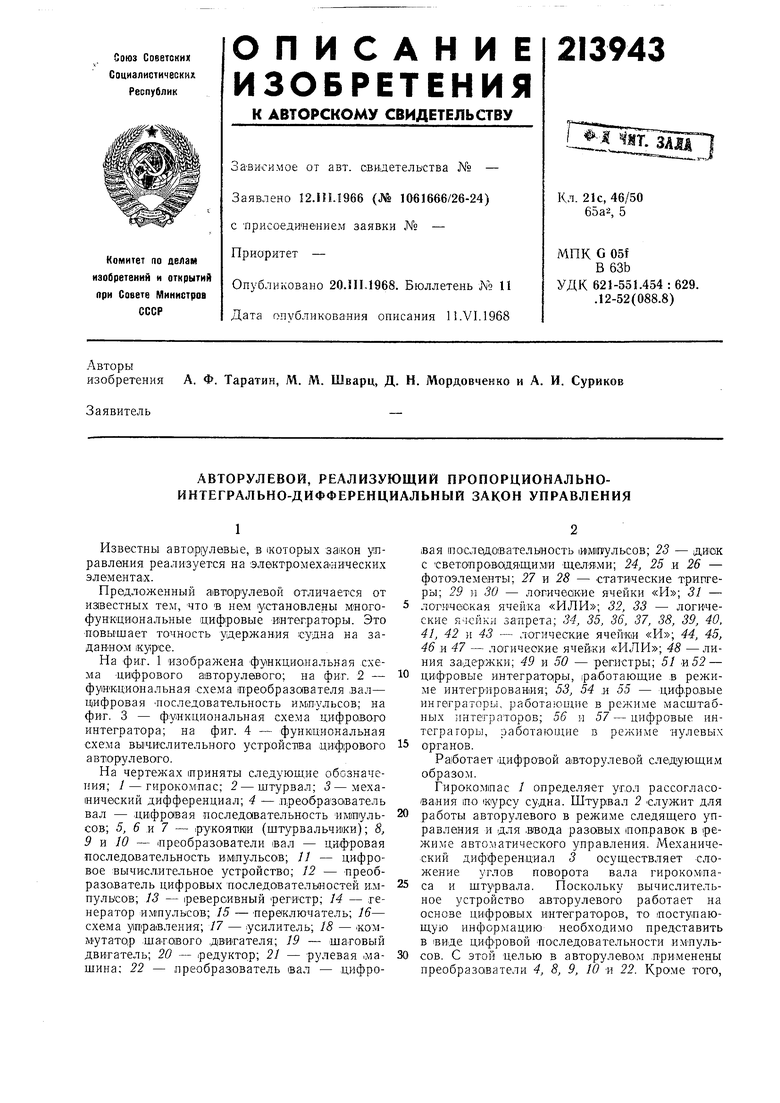

| название | год | авторы | номер документа |
|---|---|---|---|
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| Авторулевой | 1979 |
|
SU842725A1 |
| Авторулевой | 1988 |
|
SU1625780A1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ВЫСОКОСКОРОСТНЫХ СУДОВ | 2004 |
|
RU2260191C1 |
| СУДОВОЙ АВТОРУЛЕВОЙ | 1972 |
|
SU337300A1 |
| Автоматическая система управления рулемСудНА | 1979 |
|
SU839859A1 |
| Авторулевой | 1977 |
|
SU656028A1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ МЕТАЛЛОРЕЖУЩИМИ СТАНКАМИ | 1959 |
|
SU120781A1 |
| Авторулевой | 1988 |
|
SU1579851A1 |
| АВТОРУЛЕВОЙ | 1962 |
|
SU147104A1 |
i
Знан приращения
Приращение
i5
rfx
isn
H/K
ffl.
4fiИ7
5
Г Т
