Изобретение относится к системам автоматического управления, в частности, к устройствам для нелинейной коррекции параметров этих систем.
Известны устройства для нелинейной коррекции систем автоматического управления, содержащие трансформаторный дифференциальный датчик угла по;ворота .иополнительного механизма, амилитудно-фазовый дискриминатор, а также контуры са.монастройки, каждый из которых содержит аналоговый блок косвенной оценки динамических свойств системы, вьшолненный на активно-реактивных элементах и подключенный к модулятору, выход которого связан с усилителем корректирующих Сигналов.
Недостатком известных устройств является значительное время, затрачиваемое на подстройку коэффициента передачи системы при ее демпфировании в момент выхода системы на границу устойчивости «з-за дискретного характера воздействия контуров самонастройки на динамические свойства системы с явно выраженным запаздьюатаием на время оценки параметров при перестройке структуры системы управления.
Предложенное устройство отличается тем, что вход его а-мплитудно-фазового дискриминатора подключен к выходу трансформаторного дифференциального датчика угла поворота исполнительного механизма непосредственНО, а выходы амплитудно-фазового дискриминатора связаны через соответствующие .контуры са монастройки с обмогками управления фазовой асимметрией упомянутого трансформаторного датчика угла поворота исполнительного механизма системы автоматического управления.
Это позволяет уменьшить время подстройки заданных коэффициентов передачи при демпфировании системы в момент выхода ее на границу устойчивости.
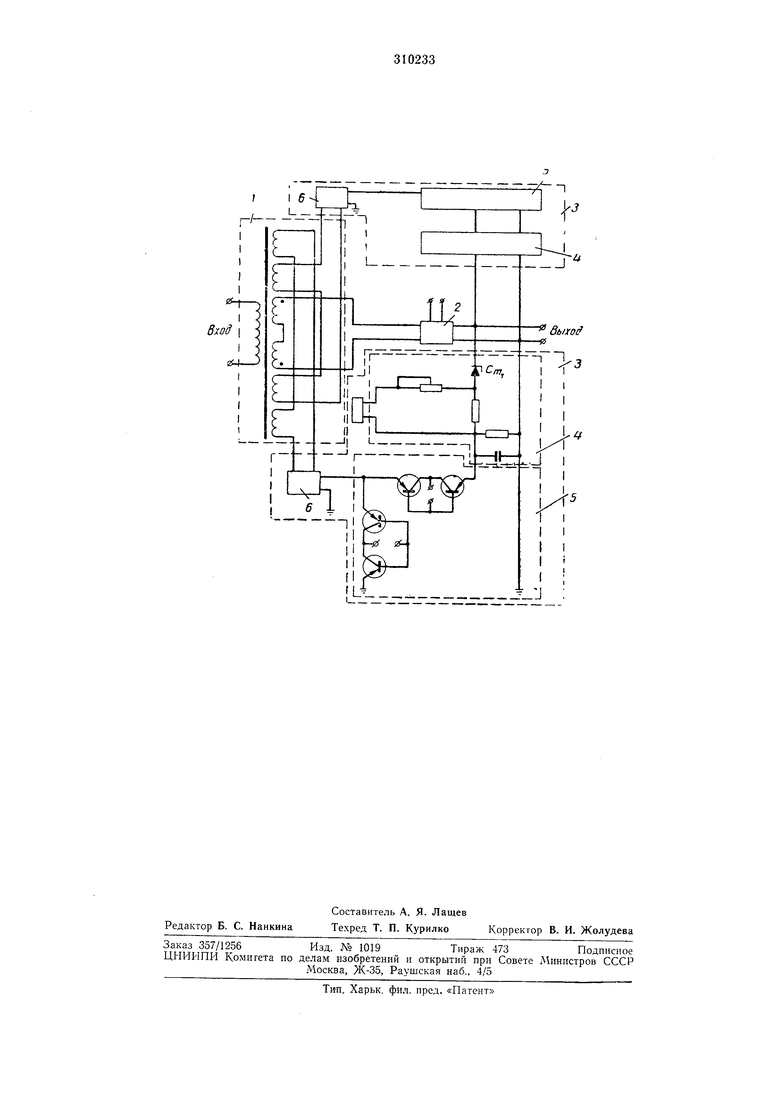
На чертеж-е представлена блок-схема предложенного устройства для нелданейпой коррекции параметров систем автоматического управления.
Выходные обмотки трансфО|рматор«ого дифференциального датчика 1 угла поворота иополнительного механизма системы подключены непосредственно ко входу амплитуднофазового дискриминатора 2, выходы которого связаны с соответствующими контурами самонастройки 5.
Каждый из контуров самонастройки включает в себя аналоговый блок 4 косвенной оценки динамических свойств системы, содержащий стабилитрон , резисторы, конденсатор и автономный источник смещения. Каждый из контуров самонастройки содержит также модулятор 5 на транзисторах, выход которого
подключен к усилителю 6 корректирующих сигналов, а усилитель связан с соответствующими обмотками управления фазовой аоимметриен трансформаторного датчика устройства.
Обмотки возбуждения трансформаторного дифференциального датчика / питаются синфазной составляющей опорного напряжения UB sin cjf, на опорные входы амнлптуднофазового дискриминатора 2 подается напряжение и BxSinw/- - срг,, (где J - круговая частота; fn - угол фазовой установки дискриминатора), а коммутационные входы модуляторов 5 контуров самонастройки 3 запитываются напряжением той же частоты, по сдвинутым на оптимальный угол настройки ог1т - ± 90 соответствующий желаемому переходному процессу ири выходе системы на границу устойчивости.
Выходное иапряжение амнлитудио-фазового дискриминатора в режиме детектирования равно:
6„ь,х(0 Л; cos Ш cos .,
где 2 - частота с.обственых колебаний системы; 1 - угол фазового сдвига выходного на пряжё игя трансформаторного датчика /. При первом же выходе ситемы за иределы заданной границы устойчивости, определяе мой в аналоговом блоке 4 оценки динамических свойств, в этом блоке происходит пробой стабилитрона С /п, и иачлнается заряд конденсатора. Это приводит к введению через схемы модулятора 5 т усилителя 6 корректирующих сигналов дополнительного воздействия на трансформаторный дифференциальны датчик, что вызывает появление угла фазовой
асимметрии а и мгновенное уменьшение коэ(1фиднента передачи системы управления. Действие корректирующей цепи каждого из конгуров самонастройки ограничено только ол 5 ним периодом собственных колебаний системы. При -ЭТОМ до момента попадания в заданную зону устойчивости корректирующее воздействие одиого из контуров 3 будет перекрываться во вре.мени корректируюнщм воздей0 ствнем параллельного ему идентичного контура еамонастройкн.
Предмет изооретення
5Устройство для нелинейной коррекции нараметров систем автоматическо1о уиравления, содержащее трансформаторный дифференциальный датчик угла новорота иснолннтельно10 мехапнзма, амплитудно-фазовый днскри.мпнатор, а также контуры самонастройки, каждый из которых содержит аналоговый блок косвенной оценки динамических свойств системы, вынолненный на активно-реактивных элементах и подключенный к модулятору, выход которого связан с усилителем корректи руюншх сигналов, отличающееся тем, что, с целью уменьщения времени подстройки заданных коэффициентов передачи при демпфировании ситемы в момент выхода ее на границу
0 устойчивости, вход амплитудно-фазового дискриминатора устройства подключен к выходу трансформаторного дифференциального датчика угла поворота исполнительиого механизма непосредственно, а выходы амплнтудно5 фазового дискриминатора связаны через соответствующие контуры самонастройки с обмотками управления фазовой асимметрией упомянутого трансформаторного датчика угла поворота исполнительиого механизма системы
автоматического управления.
1

| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления с упругой механической связью | 1977 |
|
SU717717A1 |
| Электропривод с упругой связью между электродвигателем и механизмом | 1981 |
|
SU1066012A1 |
| Электропривод с упругой связью между электродвигателем и механизмом | 1984 |
|
SU1241394A1 |
| Управляющее устройство | 1983 |
|
SU1161916A1 |
| Устройство коррекции для компенсации упругого резонанса в электромеханических системах | 1981 |
|
SU991365A1 |
| Адаптивная система управления с нестационарным упругим механическим объектом | 1984 |
|
SU1188697A1 |
| Поисковый регулятор для резонансной настройки контура нулевой последовательности сети | 1982 |
|
SU1080231A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2339988C1 |
| Следящая система | 1975 |
|
SU555377A1 |
| Устройство для измерения нестационарных температур | 1974 |
|
SU517812A1 |