Изобретение от;нооит-ся к технике восстановления поверха-юстей металлических деталей электродуговой наплавкой -и является рабочим органом в установке для наплавки изпошеиных поверхностей профилей зубьев, например, ведуЩИх ;колес гусеничных тракторов.
Известно устройство для иаплавкн, содержащее смонтированные на станичге механизм Вращения деталн, копирное устройство для поворота детали в процессе наплавки с шаблонам:И и копировальнымн пальцами.
Цель изобретения - поочередное придание каждому элементарному участку направляемой поверхности зуба горизонтального положения в точке нодвода электрода н Получение постояННой CKOpOCTiH наллавки.
Это достигается тем, что конирное устройство выполнено в виде жестко закрепленных на ведущем валу механизма вращения кулачков с профильными пазами, к-инематически связанными с ориентиром. Последний установлен на одно: 1 валу -с наллавляемой деталью и имеет число пальцев, равное числу зубьев Направляемого колеса, взаимодействующих поочередно с фигурным пазом. Паз вьпполнен на шаблоне-нлите, закрепленцой на станине.
Предложенное устройство позволяет механизировать и автоматизировать восстановление Наплавкой профилей, зубьев, например,
ведущих колес тракторов и осуществляет дзнжение нанлавляемого .ведущего колеса при наплавке изношенного профиля поверхностей зубьев.
Движение ведущего колеса состоит из движения его центра ио замкнутой траектории и согласованного с ним вращательного движения колеса вокруг своей оси. Эти движения согласованы так. что поверхность нрофплей зубьев под электродом, двигаясь отпосительно его, разворачивается в горизонтальную прямую ли1:ию и соответственно каждый элементарный наплавляемый участок поверхности зуба под электродом поочередно принимает горизонтальное положение.
Это исключает наплыв расплавленного металла с вершин зубьев .к их впадина-Л.
Линейная скорость движения повер.хноспг зуба ведущего колеса в точке подвода электрода постоянна нри неизменной скорости Враше П1я кулачков данного механнзма.
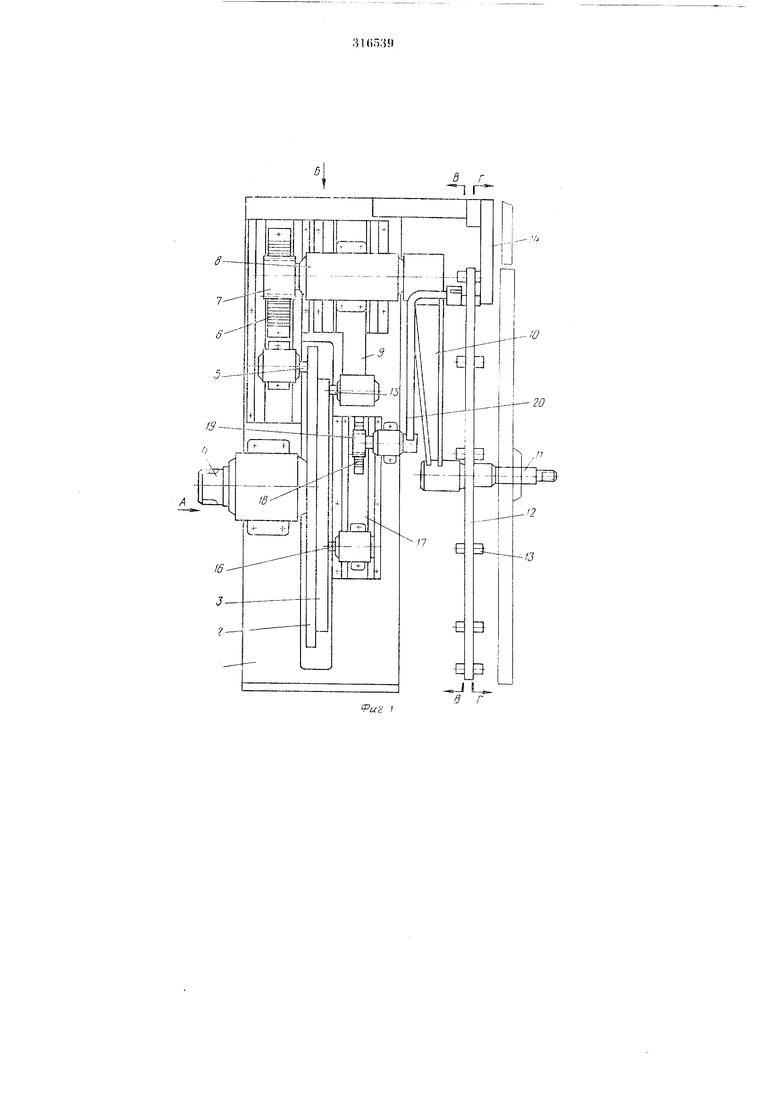
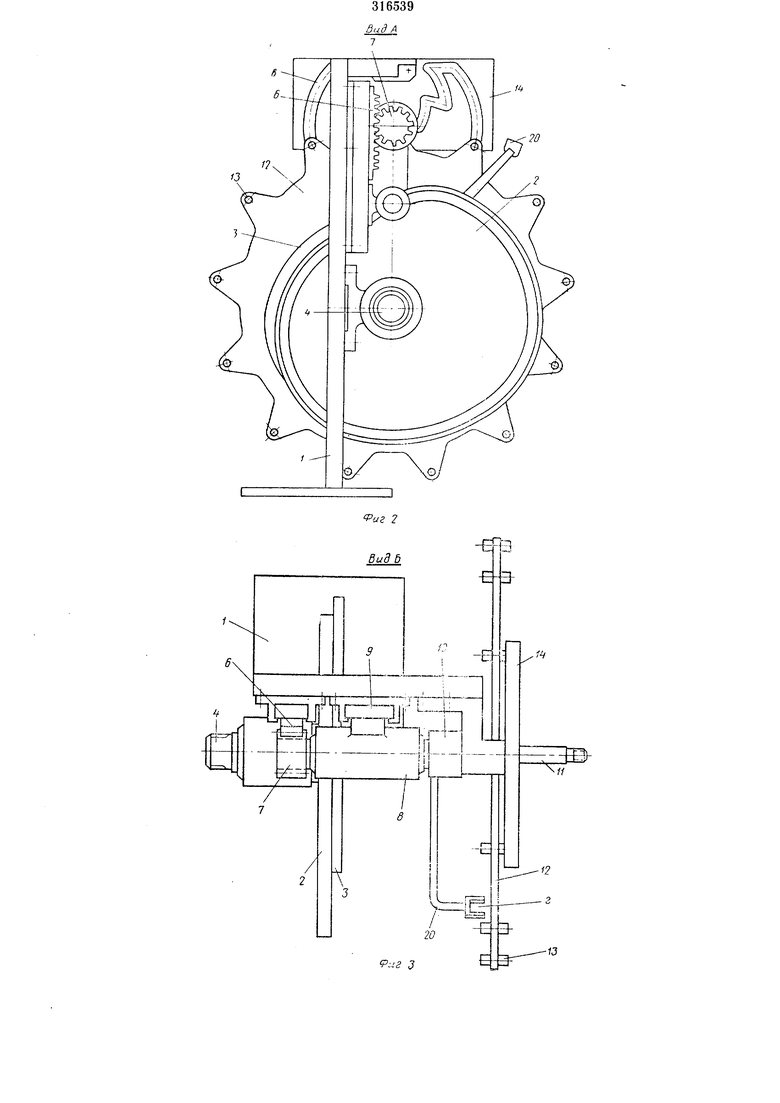
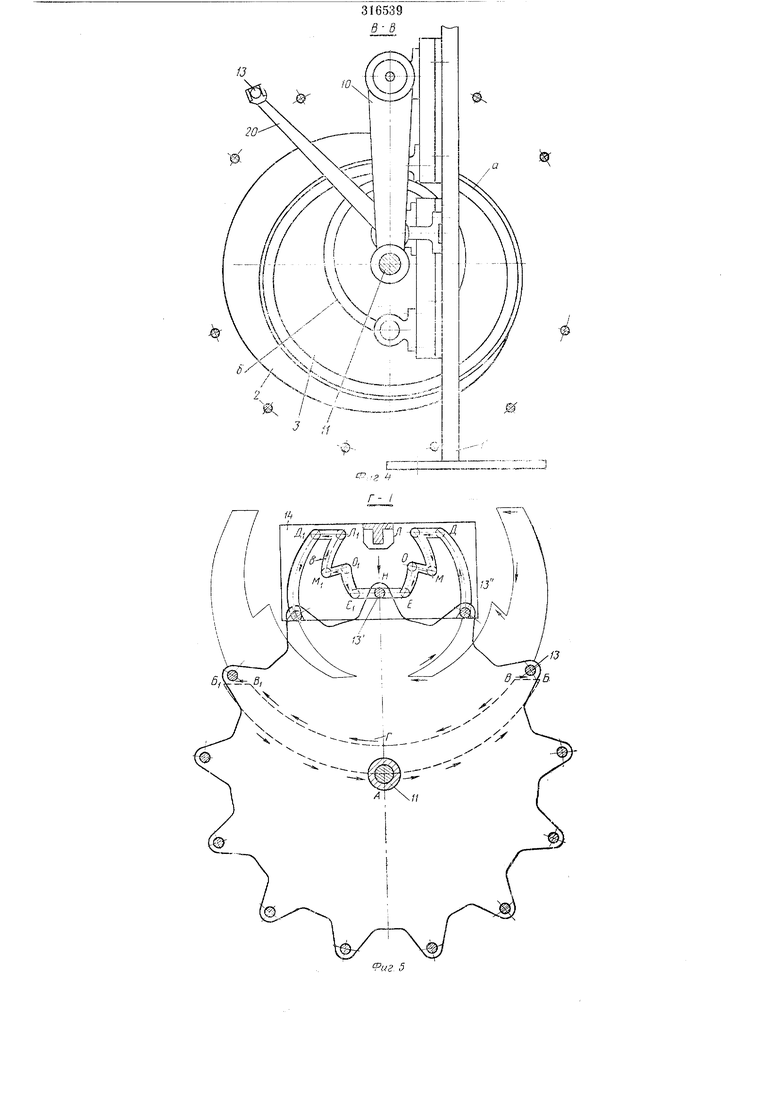
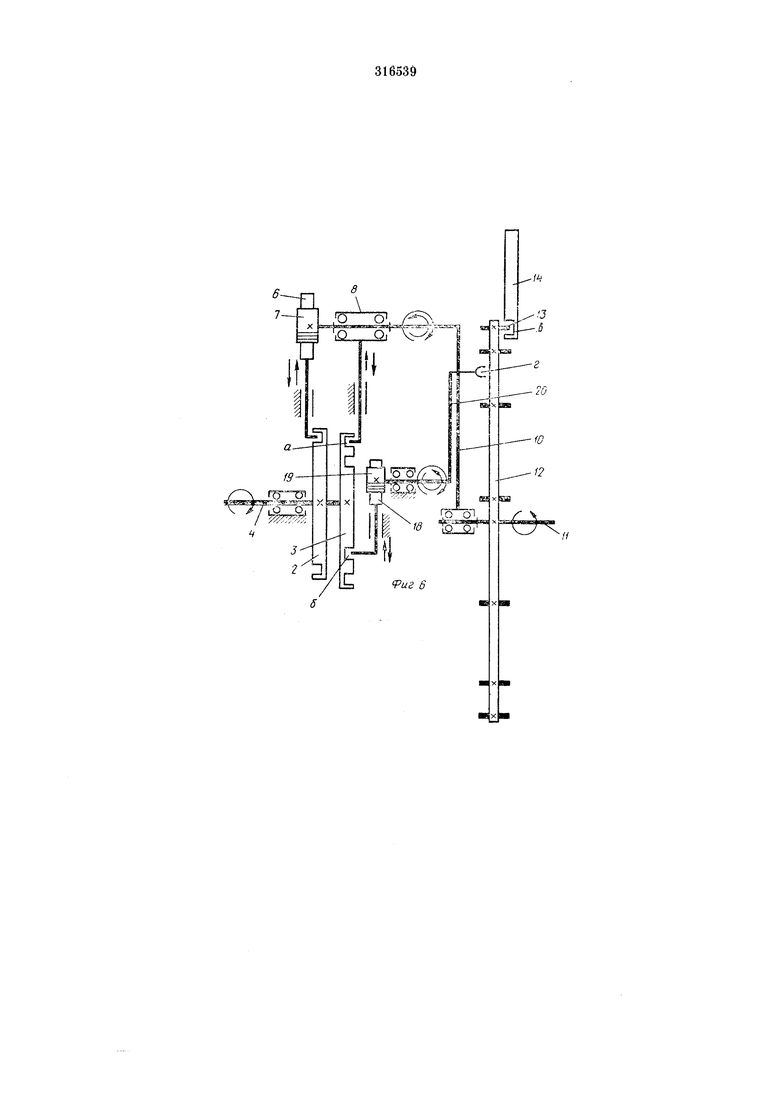
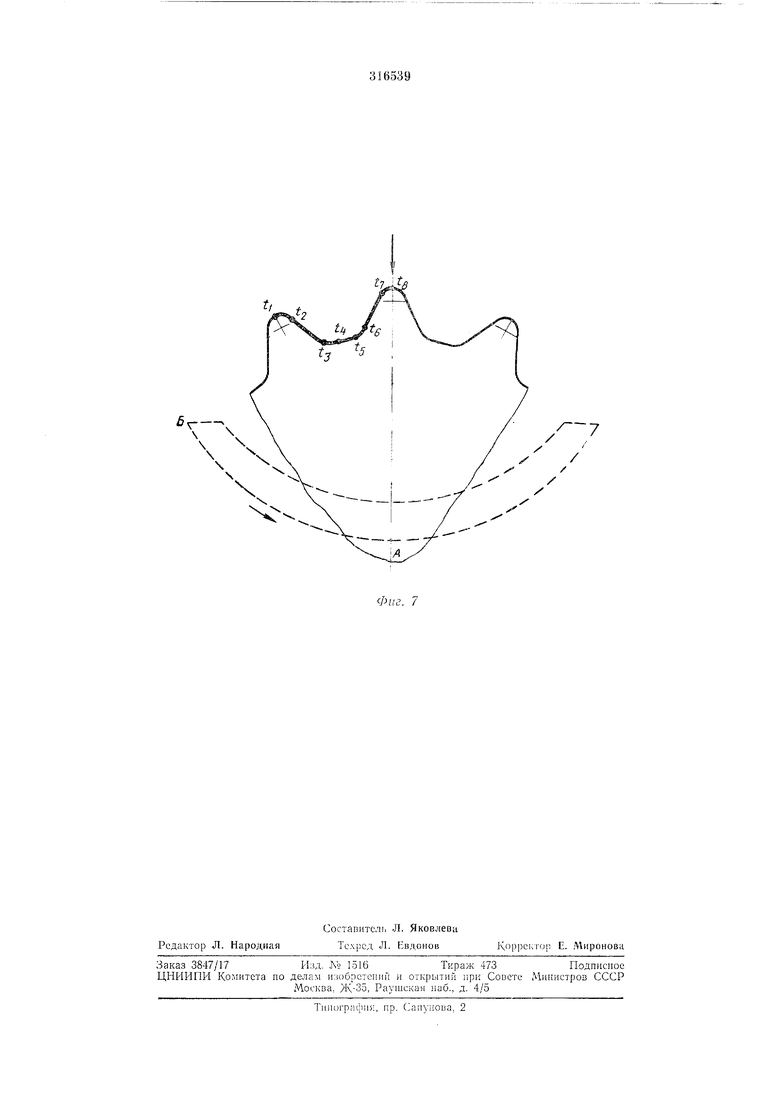
На фиг. 1 показан меха}1изм, общий вид; на фиг. 2 - внд по стрелке Л на фиг. 1; на фиг. 3 - внд по стрелке Б па фиг. 1; иа фиг. 4-разрез В-В на фиг. 1; иа фиг. 5 - разрез Г-Г на фиг. 1; на фпг. 6 - кинематическая схема механнзма; на фиг. 7 - положение зуба наплавляемого ведущего колеса в начале иаплавкп и в конпе.
Предлагаемый механизм состоит Из сгалииы , кулачка 2 с профильным iiasoM ii :кулаЧ ка 3 с двумя ирофнльныли пазами а п и. Кулачки жестко закреилеиы aia Бсдущсм валу-i расиоложеппом )з -кориусе dia иодиллликах. В п-родольиый паз кулачка 2 .входит лалец 5, установленный на тюдшнпнпках и корпусе, закрепленном на зубчатой рейке 6. Рейка имеет ЗОЗМОЖ ность вертЦ|Калы1ого персл;сщения в направляющих, закрепленных на стаиИпе. Рейка )аход1Пся в зуичагом за:1,е-1лси;1И с валом-шестерней 7, устаио-зленным ;u подшипннках в корагусс 8. Корпус 8 закрсилсп на ползуне 9, перемещающемся верт11каль;к) в Направляющих, прикре|ПлеИ1пых к cTaiiiiHc.
На валу-шестерне 7 жестко закреплен рычаг 10, 0канчИвающи1 1Ся корпусом, в котором Иа подшипи:П1ках устанозлеп вал //. Д,т111;а рычага 10 от осн вала-шестерни 7 до оси зала 11 равна раестоянпю от дентра наплавляемого ведущего колеса до донтра дугн c)K|jy i :пости, образующей веряшну зуба этого колеса.
На валу 11 жестко закреплен ориентир 12 с -круглыми иальдами 13, равнорасполож-С ;нымИ но окружгюсти с раднусоти, разным ириведенной длине рычага 1G. Цептр этой окружности совпадает е осью вала //. Количество пальцев 13 равпо чИСлу зубьев па л;; ляемого ведущего колеса.
На валу 11 жестко крсппгся наплавляемое Ведущее :колеС0 так, чго ценгры дуг окружн-остей, образующих зерпкгиу зубьез колеса, со.внадают € осями пальп„ев 13.
Пальцы 13 При враще);ии кулаЧКов 2 к 3 поочередно входят в фигурный паз в (см. фиг. 5) плиты 14, закреилси)-юй па icraHHiie /. К иолзупу 9 креиится корпус, з котором lia нодш}шниках установ.чеи najren 15, входяш,Ий в паз а кулачка 3. В паз б этого кулачка входит палец 16, раСиоложелиый aia нод)дииниках в корпусе, закрепленноги Па ползупе 17.
К ползупу 17 кренится зубчатая рейка 18, находящаяся в зацеллеппи с валом-шсстер|ней 19. Последний устаиовлен на подшиппнках в корпусе, закрепленном на . Па валу - шестерне 19 закреплен захват 20 с пазом 2 (icM. фиг, 3).
Рабочие нрофпли кулачков, профиль фигурпого паза в, ко.ЧПчество па.тьцев 13 и, соответственно, траектории движения делтра и нальцев 13 ориентира 12 данного механизма .позволяют осуществлять наплавку ведущего колеса трактора ДТ-75.
Соответствешю видоизме;1яя рабочие профили кулачков, профиль фигур|М01-о паза s, количество пальцев 13 и ИХ расиоложеп.ие на ориенгире 12 можно паи.тавлять подобные дета.тн с другнм ирофилем и количеством зубьез.
От ирнвода (на чертеже не показан) вращается Ведущий Вал 4 с кулач ками 2 н 3. Кулачок 2 при этом перемещает вниз зубчатую рейку 6, которая, поворачивая вал-н1естерню 7, .отКлоняет рычаг W па 60° от нервоначального ноложения. В это г момогг кулачок 5 на механцзм ii-ie воздействует. В оезультате центр
вала //, ориентира 12 « наилавляемого ведущего колеса движется в наиравлеНИн стрелок от точки Л до точки Б но Т|)ае.кторин АБВГ, BibiA (см. фиг. 5). Палец 13 цри этом в пазу 0 Илнты 14 не неремещается, а налец 13 движется г пазу s oi своего иервоначального положения до точки Д. В результате этого орие:цтир 12 и наплавляемое ведущее колесо поворачиваются огпосигельно осн иальцсв 13
ц относптель.чо своей оси на валу 11, а «ажды11 элемотариый участок поверхности профиля зуба всдундего колеса последовательно в точ.ке /1, 1суда подводнтся электрод, npnira.ает горрню-ггальное положение. Это иоззоляет осуп.1,ествить на.плавку оверхпости зуба на участке от точкп ц до точки /2 (см. фиг. 7). В точке /а закаичи;вается скругление зершины зуба И пачннаетея Нрямая, образуюндая его. В .момент достнжения центром вала // ориентира 12 н панлавляе.мого ведущего колееа гочкн Б кулачок 2 пачниает лодпимать рейку 6, а кулачо.к 3 воздсйст.зозать пазом а па палец 15, подпимая корнус 8 нодаиипников с валом-ц естерней 7. В результате этого рычаг/С,
под11нмаясь, отклоняется в обрат:1ую сгорону гак, что центр вала //, ориенгира 12 и нал.таз.тяемого ведущего -колеса движегся по rpaciKгорни от точки Б ;го точки В. Палец 13 движется в назу в от своего первонача-льного
положения до точкц Г:, а палец 13 от точки Д до точки Л. Ориептир 12 и ведущее колесо так}ке перемещаются без вращения, что позволяет осущесгвлять наилав;и поверхности зуба на учас:ке от точкп t2 дс) точки (з (см.
фиг. 7). В точке I-,, закапчивается , образуюгцая зуб, и начинается ее сопряжеппе ;ю ра,1иусу с зуба,
В ; гомепг доетижепия цeнтpo.I вала 11. ориентира 12 и Наплавляемого вед лцего колеса
точки .5 кулачок 2 продолжает отклоиять рычаг- 10, а ку.тачок 3 азом а начи)1ает оиускать ползун 9 с вало г-гнсстерней 7 и рычагом 10 так, чго це;ггр вала //, ориентира 12 н наплавляемого зедугцего колеса дв;:жегся но
траектории ог точки В до точки Г. При этом палец 13 дзи/кегся в назу в ог ючки : до Hi. а иалец 13 -- от точки Л до М.
В результате этого ориентир 12 п наплавляелюе ведущее ко.лссо поворачшзаютея на валу //, а каждый элемептарпый участок новерхпости зуба па радиус Со;1ряже11пя в точ1 е Н иос.тедовательпо ниинимает горпзоптйльное по:юженис, что нозво.чяет осущссгзлять па:нла15К ;1(}вс-рхности зуба па участке о: точкн /3 ло точки i.t (см. фиг. 7).
В момеиг дост:1жеция центром зала 11, ориeirrnpa 2 и нап;1а. ведущего колеса точки Г, а лалипами J3 и 13, соогветсгвенпо,
точек О и М палеи 13, иройдя lio траектории, обозпаченной шт-р1;х-:гунк1 :рноГ| л П1ией, прпходит в юложе 1пе точки М: и 15ходит в паз г захвата 20 (ем, фиг, 4}, В эгот момсщ- кулачки 2 и 3 пазом ио пазу о нрекран1аюг вестп
Одиощременио пазом по профилю б кулачок 5 начинает перемещать ползун /7 с зубчатой рейкой 18, которая при этом поворачивает вал-шестерню 19 с захватом 20, отклоняя его. Отклоняясь, захват 20 ведет вошедший тз паз г палец 13, повораггивая па валу 11 опиентир 12 и нанлавляемое ведущее колесо. Пальцы 13 и 13 движутся в пазу в от точек О, и М до М ц.О. Это позволяет осуществлять Наплавку впаднпы па участке от
точки tt до точки f (см. ФИГ. 7).
По тостижеИИИ пальиами 1-3 и 13 и 13 точек М, О и 0 кулачок 3 пазом б Ипскпатцает отклонять захват 20. Однов:пеме11по 2 и кулячОК 3 просЬИлем а начинают воздействовать па рычаг 10, который, поднимаясь, отклоняется так, что цбнтп вала //, ориентиоа 12 -и наплавляемого велуптего колеса движется по траектории от точки Г до точки Si.
Палец 13 при этом выходит из паза г захвата 20 и ДВ.ИЖОТСЯ по -своей тпаектории, а захват 20 под воздействием паза б кулачка 3 возвращается В первоначальное положение.
Пальпы 13 и 13 ДВИЖУТСЯ в пазу в от точек /Vfi и О до точек Л, и Е. В результате этого ориентир 12 и наилавляемое ведущее колесо поворачиваются па палу //, а каждый элементарный участок повепхтюсти зуба на радиусе сопряжения в точке Я иоследопателыю принимает гопизонтальное положение, что позволяет осуществлять наплавку поверхности зуба ня участке от точки t-, до точки /к (см. сЬнг. 7.
Ппи дальнейшем воздействии кулачка 2 и кулачка 3 пазом а па рычаг 10 центр вала // ориентира 12 и наплав.тяемого ве.аушего колеса движется по траектории от точки Bi до точки /),. При этом пален 13 продолжает движение в пазу б от точки Л до точки Д,. а палец 13 от точки Е до первоначального положения пальиа 13. Ориентир 12 и ведущее колесо при этом перемещаются, не вращаясь, что позволяет последовательно осуществлять паплавку поверхности зуба иа участке от точки tg до точки /7 (см. фиг. 7).
Кулачки 2 и 3 пазом а продолжают воздействовать на рычаг 10. Центр вала //. ориентира 12 и наплавляемого ведущего колеса движется по траектории от точкн 5i до точки /1. Палец 13 при этом двпжется в пазу b от точкп Д| до первоначального положения пальца 13, палец 13 в пазу в не перемспдается, а палег 13 движется до первоначального положения пальца 13. В результате этого опиентнр 12 и наплавляедюе ведущее колесо попорачт;ваются на валу // вокруг оси пальца 13. что позволяет осуществлять наплавку повепхностн зуба на участке от точкн f- до точкн / (с.т. фнг. 7).
Точка fs является пернии-юй зуба. Таким образом осуществляется наплавка вод -н1его колеса от вертпины одного зуба до вепнпнп-, следуюн1его . В этот момент заканчивается однн оборот всдун1егоо вала 4 с к мачкамн 2 н 3. Дальнейнтее вращение ведмцего вала позволяет осуществлят) дальнейтную утаплавку поверхности профиля зубьев ведуи1.его колега.
При нзмеиои1 и нанравлення вращения педугнсго вала направление двнження наплавляелтого ведущего колеса меняется на противоположное.
25
Предмет нзобретения
Уетройство для наплавки, препмуг11,естр,снно профнлыюй поверхпостп зубьев ведущих колес гусеничных тракторов, содержащее смонтнрованн1ле на станппе механизм впан1:ення деталн, коннрное стройство для поворота деталн в процессе нанлавки с н.аблонамн н копировальными пальпамтг. отличающееся тем. что. с целью поочередиого прттдания каждому
элемеитарному участку иаплавляемой поверхности злба горизонтального положения и точке подвода электрода и получення постоянной скорости наилавки, копириое устройство выполнено в внде жестко закрепленных на ведущедг валу механизма вращения к лачков с профильными пазами, кипсматически связанными с орнеитиромг, установленныд: на одном валу с наплавляемой деталью н имеющим число иальцев. равное зубьев наплапляемого колеса, взаимодействующпх поочепедио с фигуриым , выполненным на нгаблоненлите. закренленной на станиие.
13
iif
20
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для АВТОМАТИЧЕСКОЙ НАПЛАВКИ | 1970 |
|
SU281692A1 |
| Механизм фиксации намоточного вала | 1987 |
|
SU1416408A1 |
| Устройство для доворота и индексации шпинделя в различных угловых положениях | 1982 |
|
SU1047652A1 |
| Устройство для изменения размера ячеи сети к сетевязальной машине | 1980 |
|
SU1000497A1 |
| Полуавтомат для стачивания деталей по заданному контуру | 1974 |
|
SU506665A1 |
| Швейный полуавтомат для выполнения коротких строчек | 1976 |
|
SU616351A1 |
| Грейферное устройство для подачи заготовок в пресс | 1987 |
|
SU1454551A1 |
| Устройство для транпортировки капсул в ориентированном положении | 1975 |
|
SU627744A3 |
| Устройство для автоматической сварки криволинейных швов | 1983 |
|
SU1106621A1 |
| ВОЛНОВАЯ РЕЕЧНАЯ ПЕРЕДАЧА | 2017 |
|
RU2662597C1 |
Вид 6
316539
