Прибор предназначен для механизации процесса синтеза кривошипно-ползунного механизма и содержит планшет и смонтированную на нем модель кривошипно-ползунного механизма. Модель состоит из переставной направляющей с ползуном и трех планок с продольной прорезью. Одна из планок укреплена на неподвижном шарнире и имитирует кривошип, другая шарнирно укреплена на ползуне, а третья представляет собой шатун, закреплена на ползуне с возможностью поворота и с помошью подвижного шарнира соединена с первой планкой. В месте пересечения прорезей первой и второй плапок установлен нишуший штифт.
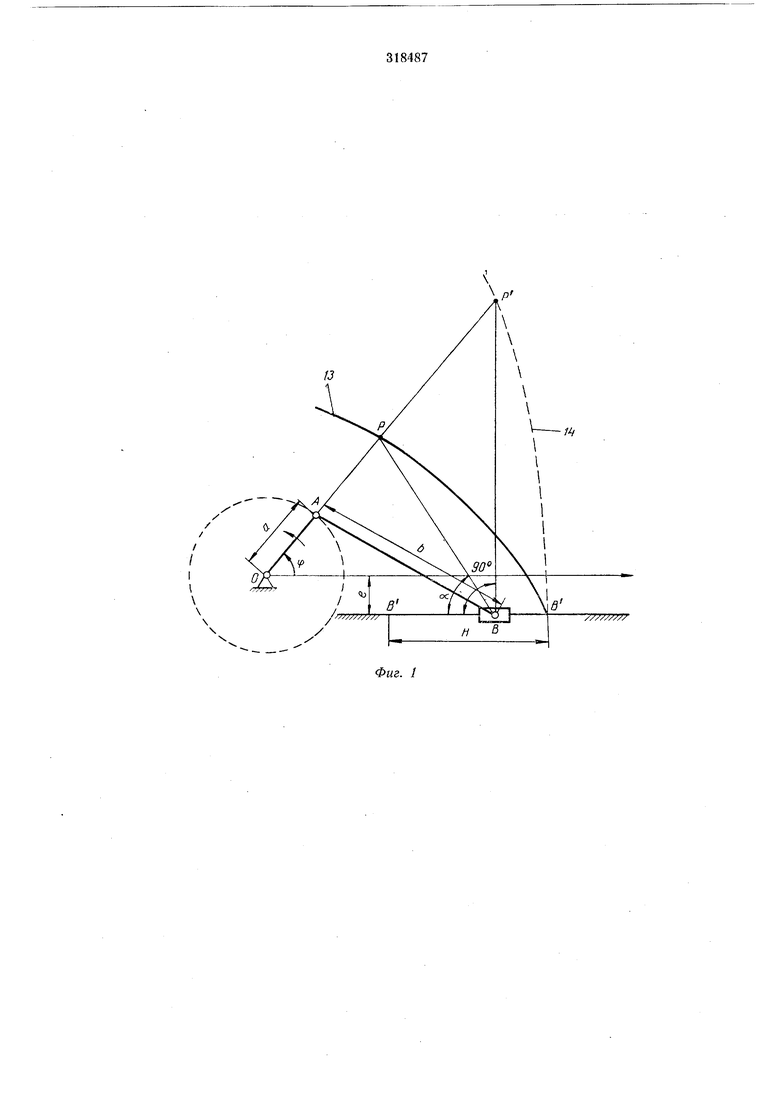
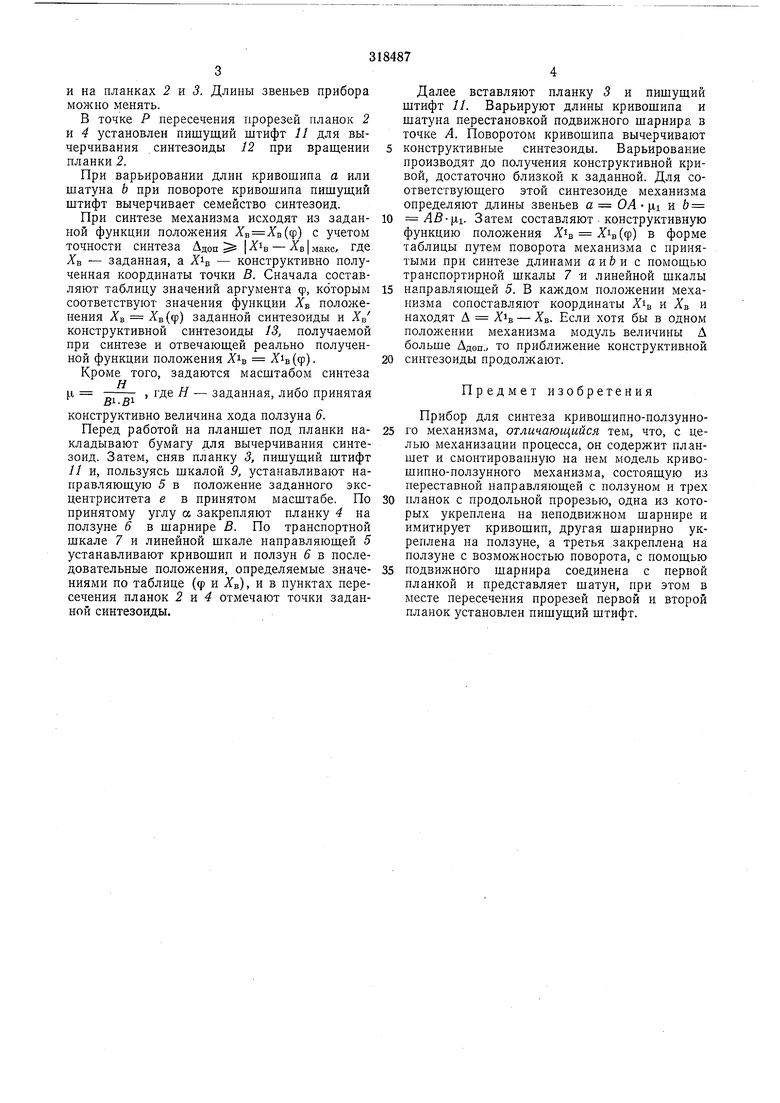
На фиг. 1 показана схема синтезируемого механизма; на фиг. 2 - прибор, общий вид.
Синтез плоских механизмов выполняется путем воспроизведения непрерывной функции на данном отрезке методом синтезоиды. Синтезоидной названа кривая, однозначно соответствующая функции положения и кинематической схеме механизма. Центроида шатуна .механизма является одной из его синтезоид.
По схеме синтезируемого мехаиизма определяют точки Р синтезоиды или PI - центроиды шатуна и вычерчивают отрезки сиитеэоиды или центроиды. В качестве синтезонды Выбрано геометрическое место точек пересечения направления кривошипа О А и прямой
ВР, проведенной через подвижной шарнир В под произвольно-выбранным, но всегда постоянным углом а, к направляющей ползуна. В частном случае, когда « 90°, синтезоида является центроидой шатуна АВ.
Прибор для синтеза кривошипно-ползунного механизма содержит планшет / и смонтированную на нем модель кривошипно-ползунного механизма.
Этот механизм содержит три планки 2, 3 и 4 и переставную в пазах планшета направляюшую 5. Планки имеют продольные прорези. Планка 2 закреплепа на неподвижном шарнире в точке О и имитирует кривошин.
Планка 4 шарнирно укреплена в точке В на нолзуне 6 направляюшей 5 н образует с последней угол а, фиксируемый подвижным шарниром в точке В.
Планка 3 закреплена на ползуне 6 с возможностью поворота и имитирует шатун. С помощью подвижного шарнира в точке Л планки 2 и 5 соединены между собой.
Угловая координата ср отличается нанесенной на планшете транспортирной шкалой 7, а
угол а фиксируется на ползуне 6 подвижной прозрачной транспортирной шкалой 8. Эксцентриситет е механизма отмечается по линейпой шкале 9 и фиксируется закреплением направляющей 5 в пазах 10 планшета. Линейи на планках 2 и . Длины звеньев прибора можно менять.
В точке Р пересечения прорезей планок 2 и 4 установлен пишущий штифт 11 для вычерчивания синтезоиды 12 при враш;ении планки 2.
При варьировании длин кривошипа а или шатуна b при повороте кривошипа пишущий штифт вычерчивает семейство синтезоид.
При синтезе механизма исходят из заданной функции положения (ф) с учетом точности синтеза Адоп - в|макс, где в - заданная, а - конструктивно полученная координаты точки В. Сначала составляют таблицу значений аргумента ф, которым соответствуют значения функции Х положенения ЛВ Е(Ф) заданной синтезоиды и XT/ конструктивной синтезоиды 13, получаемой при синтезе и отвечающей реально полученной функции положения 1в(ф)Кроме того, задаются масштабом синтеза
|.1 , где Я - заданная, либо принятая
SlB
конструктивно величина хода ползуна 6.
Перед работой на планшет под планки накладывают бумагу для вычерчивания синтезоид. Затем, сняв планку 3, пишущий штифт 11 и, пользуясь шкалой 9, устанавливают направляющую 5 в положение заданного эксцентриситета е в принятом масштабе. По принятому углу а закрепляют планку 4 на ползуне 6 в шарнире В. По транспортной шкале 7 и линейной шкале направляюшей 5 устанавливают кривошип и ползун 6 в последовательные положения, определяемые значениями по таблице (ф и Xz), и в пунктах пересечения планок 2 и 4 отмечают точки заданной синтезоиды.
Далее вставляют планку 3 и пишущий штифт 11. Варьируют длины кривошипа и шатуна перестановкой подвижного шарнира в точке А. Поворотом кривошипа вычерчивают
конструктивные синтезоиды. Варьирование производят до получения конструктивной кривой, достаточно близкой к заданной. Для соответствующего этой синтезоиде механизма определяют длины звеньев а ОЛ i и Ь
,1. Затем составляют конструктивную функцию положения 1в 1в(ф) в форме таблицы путем поворота механизма с принятыми при синтезе длинами а и 6 и с помощью транспортирной шкалы 7 -и линейной шкалы
направляющей 5. В каждом положении механизма сопоставляют координаты и и находят А - Х. Если хотя бы в одном положении механизма модуль величины А больше Адоп.. то приближение конструктивной
синтезоиды продолжают.
Предмет изобретения
Прибор для синтеза кривошипно-ползунного механизма, отличающийся тем, что, с целью механизации процесса, он содержит нланшет и смонтированную на нем модель кривошипно-ползунного механизма, состоящую из переставной направляющей с ползуном и трех нланок с продольной прорезью, одна из которых укреплена на неподвижном шарнире и имитирует кривошип, другая шарнирно укреплена на ползуне, а третья закреплена на ползуне с возможностью поворота, с помощью подвижного шарнира соединена с первой планкой и представляет шатун, при этом в месте пересечения прорезей первой и второй планок установлен пишущий штифт.
/J
Фиг. 1
Фиг. г
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИБОР ДЛЯ СИНТЕЗА ЧЕТЫРЕХЗВЕННОГО КУЛИСНОГОМЕХАНИЗМА | 1970 |
|
SU283595A1 |
| Прибор для синтеза кривошипно-ползунного механизма | 1978 |
|
SU768660A1 |
| Прибор для синтеза кривошипноползунного механизма | 1973 |
|
SU456751A2 |
| ПРИБОР ДЛЯ СИНТЕЗА ПЛОСКОГО ШАРНИРНОГО ЧЕТЫРЕХЗВЕННОГО МЕХАНИЗМА | 1971 |
|
SU433046A1 |
| ПРИБОР ДЛЯ СИНТЕЗА ШЕСТИЗВЕННОГО КУЛИСНОГОМЕХАНИЗМА | 1969 |
|
SU237396A1 |
| Прибор для синтеза плоского шарнирного четырехзвенного механизма | 1974 |
|
SU704829A1 |
| ПРИБОР ДЛЯ СИНТЕЗА ШЕСТИЗВЕННОГО КУЛИСНОГОМЕХАНИЗМА | 1969 |
|
SU238793A1 |
| ПРИБОР ДЛЯ СИНТЕЗА ПЛОСКОГО ШАРНИРНОГО ЧЕТЫРЕХЗВЕННОГО МЕХАНИЗМА | 1969 |
|
SU238794A1 |
| ПРИБОР ДЛЯ СИНТЕЗА ПЛОСКОГО ШАРНИРНОГО ЧЕТЫРЕХЗВЕННОГО /МЕХАНИЗМА | 1969 |
|
SU237397A1 |
| Прибор для синтеза пространственного механизма | 1979 |
|
SU870201A1 |