Изобретение относится к системам автоматического регулирования и может быть использовано при их настройке.
Практика настройки регуляторов показывает, что недостаточно настроить регулятор на максимальное быстродействие. Необходимо, система регулирования обладала определенными резонансными свойствами, соответствующими минимальному увеличению амплитуды колебаний регулируемого параметра резонансной частоты - минимальному раскачиванию колебаний.
Известен способ экспериментальной настройки резонансных свойств системы регулирования непосредственно по амплитудно-частотным характеристикам, получаемым возмущением системы гармоническими колебаниями различной частоты.
Однако известный способ требует достаточно сложной специальной аппаратуры для генерации гармонических колебаний неременной частоты и для анализа реакции системы на эти колебания. Кроме того, этот способ требует длительного воздействия на объект регулирования колебаниями с частотами, близкими к резоманспой. Амплитуда таких колебаний может в несколько раз превышать амплитуду задаваемых колебательных возмущений и быть недопустимой для объекта регулирования.
в разомкнутом состоянии системы определяют запаздывание сигнала в объекте регулирования, замыкают систему, формируют и подают в регулятор одиночный прямоугольный импульс длительностью, равной удвоенной величине запаздывания, измеряют амплитуды всех колебаний выходного сигнала регулятора, но сумме которых судят о резонансных свойствах системы.
Эти отличия делают предлагаемый способ проще известного.
На фиг. 1 представлены амплитудно-частотные характеристики астатической системы регулирования при гармоническом возмущении;
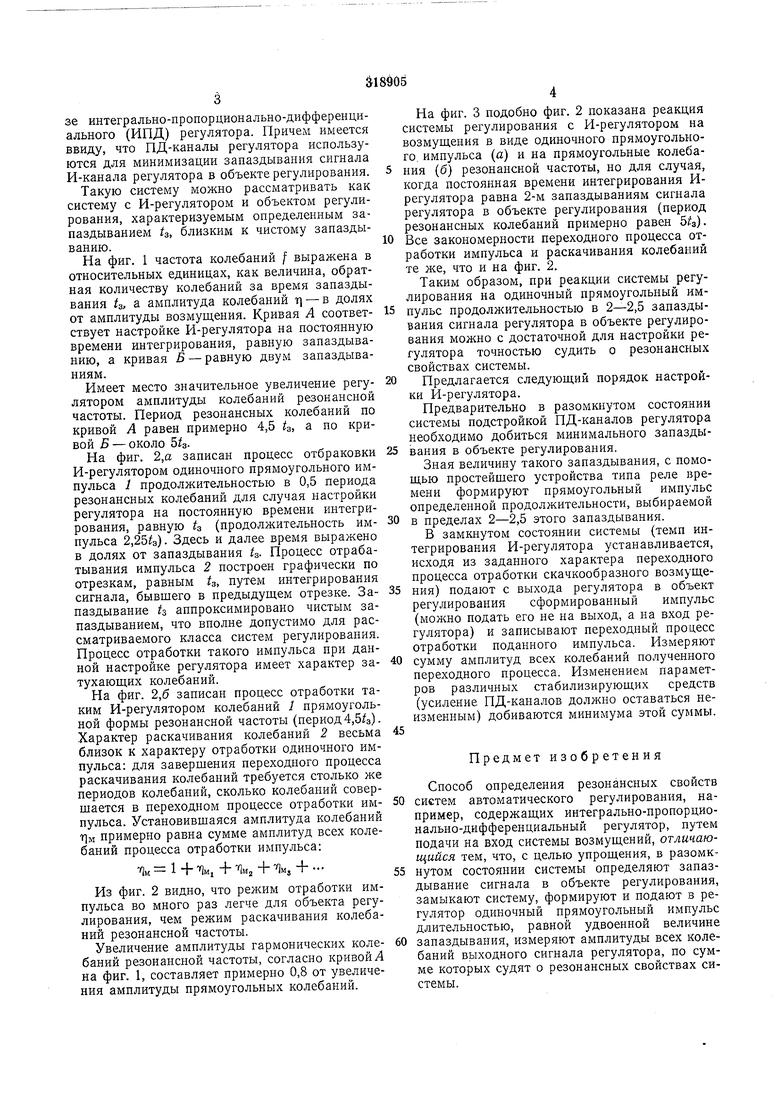
на фиг. 2 - резонансные свойства астатической системы регулирования, в которой постоянная времени интегрирования равна запаздыванию: на фнг. 2,а - реакция на одиночный прямоугольный импульс продолжительностью
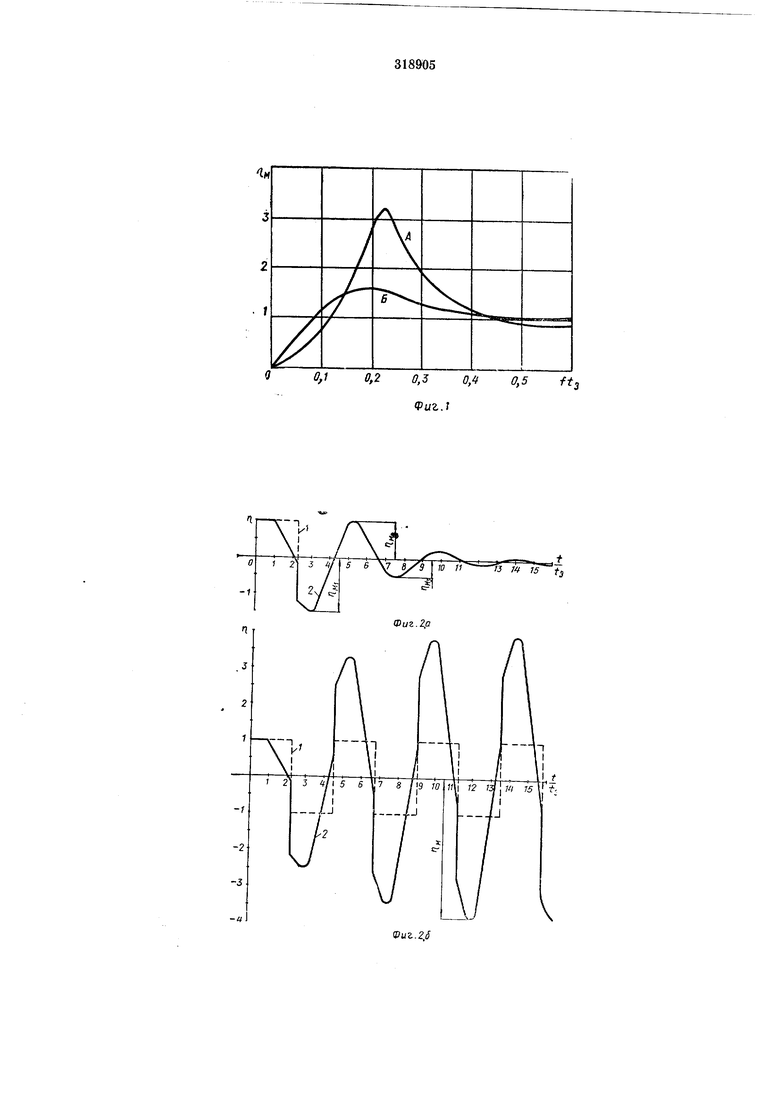
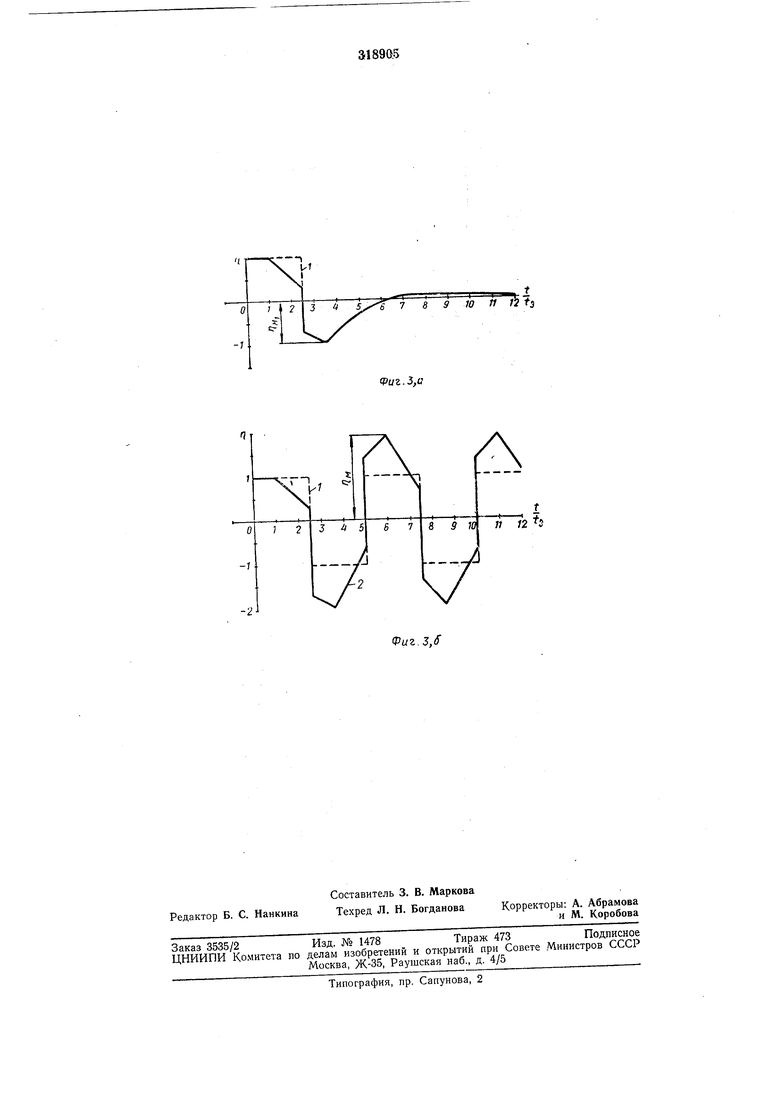
2,25 запаздывания, на фиг. 2,6 - реакция на колебания прямоугольной формы с периодом в 4,5 запаздывания; на фиг. 3 - то же, что и на фиг. 2, но для случая, когда постоянная времени интегрирования равна 2-м запаздываниям.
Характеристики па фиг. 1 показывают свойство астатической системы регулирования изменять амплитуду гармонических колебаний различной частоты. Здесь и далее имеется ввизе интегрально-пропорционально-дифференциального (ИПД) регулятора. Причем имеется ввиду, что ПД-каналы регулятора используются для минимизации запаздывания сигнала И-канала регулятора в объекте регулирования. Такую систему можно рассматривать как систему с И-регулятором и объектом регулирования, характеризуемым определенным запаздыванием ta, близким к чистому запаздыванию. На фиг. 1 частота колебаний f выражена в относительных единицах, как величина, обратная количеству колебаний за время запаздывания ts, а амплитуда колебаний ц - в долях от амплитуды возмущения. Кривая А соответ- 15 ствует настройке И-регулятора на постоянную времени интегрирования, равную запаздыванию, а кривая Б - равную двум запаздываниям. Имеет место значительное увеличение регу- 20 лятором амплитуды колебаний резонансной частоты. Период резонансных колебаний по кривой Л равен примерно 4,5 ta, а по кривой Б - около . На фиг. 2,а записан процесс отбраковки 25 И-регулятором одиночного прямоугольного импульса 1 продолжительностью в 0,5 периода резонансных колебаний для случая настройки регулятора на постоянную времени интегрирования, равную з (продолжительность им- 30 пульса 2,254). Здесь и далее время выражено в долях от запаздывания з. Процесс отрабатывания имнульса 2 построен графически по отрезкам, равным tg, путем интегрирования сигнала, бывшего в предыдущем отрезке. За- 35 паздывание /з аппроксимировано чистым запаздыванием, что вполне допустимо для рассматриваемого класса систем регулирования. Процесс отработки такого импульса при данной настройке регулятора имеет характер за- 40 тухающих колебаний. На фиг. 2,6 записан процесс отработки таким И-регулятором колебаний 1 прямоугольной формы резонансной частоты (период4,54). Характер раскачивания колебаний 2 весьма 45 близок к характеру отработки одиночного импульса: для завершения переходного процесса раскачивания колебаний требуется столько же периодов колебаний, сколько колебаний совершается в переходном процессе отработки им- 50 пульса. Установившаяся амплитуда колебаний Т1м примерно равна сумме амплитуд всех колебаний процесса отработки импульса: м 1 + м, + Mj + , + Из фиг. 2 видно, что режим отработки импульса во много раз легче для объекта регулирования, чем режим раскачивания колебаний резонансной частоты. 5 10 55 На фиг. 3 подобно фиг. 2 показана реакция системы регулирования с И-регулятором на возмущения в виде одиночного прямоугольного, импульса (а) и на прямоугольные колебаПИЯ (б) резонансной частоты, но для случая, когда постоянная времени интегрирования Ирегулятора равна 2-м запаздываниям сигнала регулятора в объекте регулирования (период резонансных колебаний примерно равен Ыа). Все закономерности переходного процесса отработки импульса и раскачивания колебаний те же, что и на фиг. 2. Таким образом, при реакции системы регулирования на одиночный прямоугольный импульс продолжительностью в 2-2,5 запаздывания сигнала регулятора в объекте регулироеания можно с достаточной для настройки регулятора точностью судить о резонансных свойствах системы. Предлагается следующий порядок настройки И-регулятора. Предварительно в разомкнутом состоянии системы подстройкой ПД-каналов регулятора необходимо добиться минимального запаздывания в объекте регулирования. Зная величину такого запаздывания, с помощью простейшего устройства типа реле времени формируют прямоугольный импульс определенной продолжительности, выбираемой в пределах 2-2,5 этого запаздывания, В замкнутом состоянии системы (темп интегрирования И-регулятора устанавливается, исходя из заданного характера переходного процесса отработки скачкообразного возмущения) подают с выхода регулятора в объект регулирования сформированный импульс (можно подать его не на выход, а на вход регулятора) и записывают переходный процесс отработки поданного импульса. Измеряют сумму амплитуд всех колебаний полученного переходного процесса. Изменением параметров различных стабилизирующих средств (усиление ПД-каналов должно оставаться неизменным) добиваются минимума этой суммы. Предмет изобретения Способ определения резонансных свойств систем автоматического регулирования, например, содержащих интегрально-пропорционально-дифференциальный регулятор, путем подачи на вход системы возмущений, отличающийся тем, что, с целью упрощения, в разомкнутом состоянии системы определяют запаздывание сигнала в объекте регулирования, замыкают систему, формируют и подают в регулятор одиночный прямоугольный импульс длительностью, равной удвоенной величине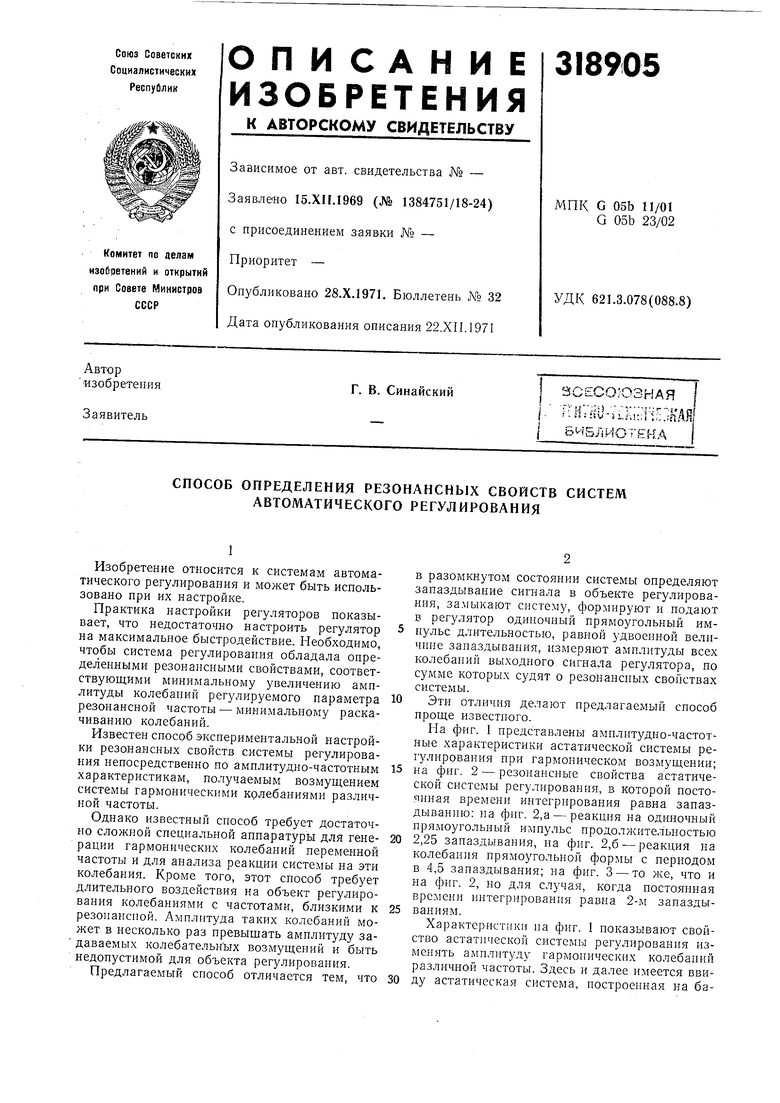
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАБОТЫ ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНОГО РЕГУЛЯТОРА | 2014 |
|
RU2573731C2 |
| СПОСОБ УСТРАНЕНИЯ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ ВОЗМУЩЕНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ | 2016 |
|
RU2648930C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ АСТАТИЧЕСКОГО ОБЪЕКТА | 1996 |
|
RU2103714C1 |
| РЕГУЛИРУЮЩИЙ МОДУЛЬ И УСТРОЙСТВО ДЛЯ ВОЗВРАТА В ИСХОДНОЕ СОСТОЯНИЕ ОСЦИЛЛЯТОРА, ВОЗБУЖДАЕМОГО ГАРМОНИЧЕСКИМ КОЛЕБАНИЕМ, А ТАКЖЕ ДАТЧИК МГНОВЕННОЙ УГЛОВОЙ СКОРОСТИ | 2011 |
|
RU2565516C2 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОЙ ПОДСТРОЙКИ ЗОИЫ НЕЧУВСТВИТЕЛЬНОСТИ | 1972 |
|
SU344908A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2015 |
|
RU2612340C1 |
| СПОСОБ КОМПЕНСАЦИИ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2608081C2 |
| СПОСОБ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМ ОБЪЕКТОМ | 1989 |
|
RU2017196C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2339988C1 |
| СПОСОБ ФОРМИРОВАНИЯ ПИ-ЗАКОНА РЕГУЛИРОВАНИЯ | 1995 |
|
RU2103715C1 |
) 21 5 4
-1
5 6 V да т T5t3
Фиг.2а
9 Ю П 17 fj
Фиг. 3,с,
11 12 г
Фиг.3,5
