Изобретение относится к области автоматики и вычислительной техники и может быть использовано в проектировании автоматических устройств.
Известна следящая система, которая содержит два датчика и два приемника (точный и грубый каналы), синхронизирующее устройство, усилитель, двигатель и редуктор. Работа такой следящей системы в основном происходит по точному каналу, а грубый канал и синхронизирующее устройство нредназначены для обеспечения согласования при углах рассогласования, больших зоны синхронизации точного канала. Из-за необходимости установки двух датчиков и двух приемяиков увеличивается количество соединительных проводов, вес и габариты устройства, а в ряде случаев увеличение момента трения и момента инерции на чувствительной оси недопустимо.
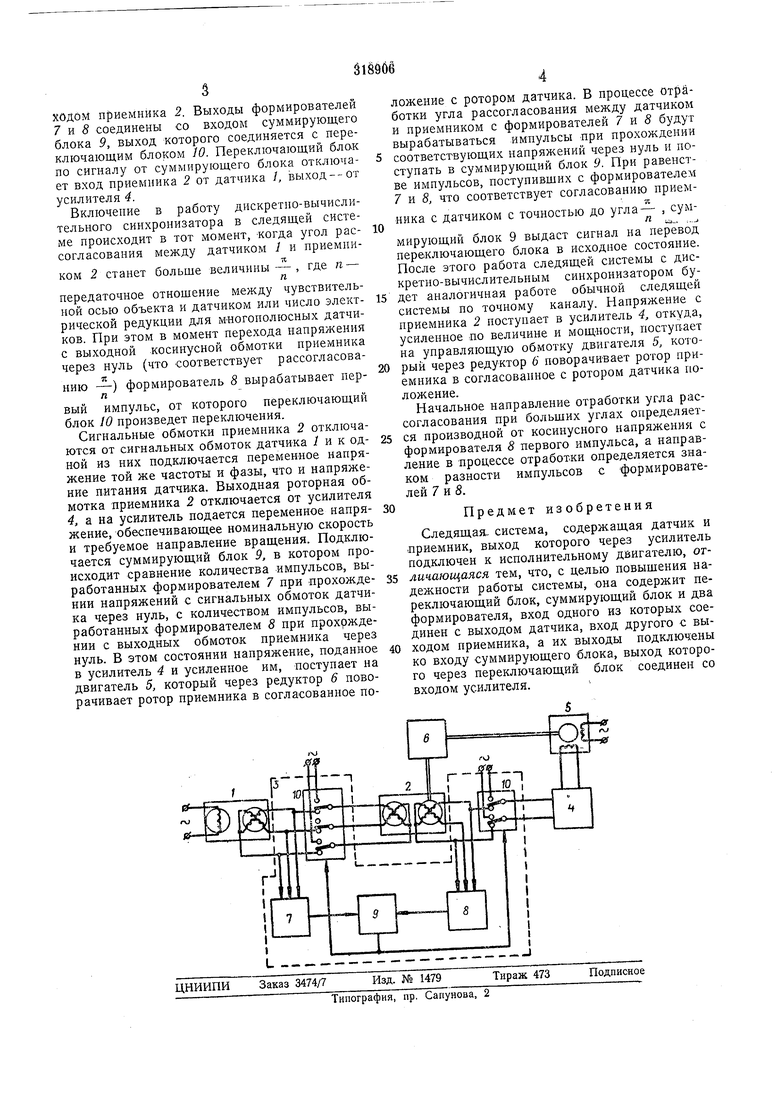
Сущность предлагаемого .изобретения заключается в том, что следящая система содержит дискретно-вычислительный синхронизатор, включающий в себя два формирователя, подключеиные своими входами соответственно к выходу датчика и приемника, суммирующий блок, подключенный к формирователям, и переключающий блок, соединенный входом с .суммирующим блоком, а выходом - с усилителем. iB этом случае не требуется устанавлиisaTb второго датчика и приемника, что сокращает количество соединительных проводов, уменьщает момент трения и момент инерции На чзвствительной оси и позволяет создавать компактные конструкции. Благодаря больщому быстродействию дискретно-вычислительного синхронизатора следящая система может согласовываться практически при всех возможных углах рассогласования. На чертеже дана блок-схема предлагаемой
следящей системы с дискретно-вычнслнтельным синхронизатором, где:
/ - датчик (синусно-косинуспый трансформатор); 2 - приемник; 3 - дискретно-вычислительный синхронизатор; 4 - усилитель; 5 -
двигатель; - редуктор.
Дискретно-вычислительный синхронизатор содержит формирователь 7 импульсов из напряжения датчика, формирователь 8 импульсов из напряжения приемника, суммирующий
блок 9 и переключающий блок 10.
Дискретно-вычислительный синхронизатор 3 своими входами соединен с выходами датчика / и приемника 2, а выход его соединен со входом усилителя 4, который соединен с управляющей обмоткой двигателя 5. Двигатель механически соединен с редуктором 6 и далее с ротором приемника 2.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1979 |
|
SU903803A2 |
| Следящая система | 1978 |
|
SU744435A1 |
| Следящий электропривод | 1980 |
|
SU903804A1 |
| Следящая система | 1977 |
|
SU622044A1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
| КВАЗИОПТИМАЛЬНАЯ ПО БЫСТРОДЕЙСТВИЮ СЛЕДЯЩАЯ СИСТЕМА | 1972 |
|
SU326548A1 |
| Устройство для синхронизации раздельных носителей звука и изображения | 1979 |
|
SU930201A1 |
| ЦИФРОВАЯ СЛЕДЯЩАЯ СИСТЕМАт | 1972 |
|
SU428358A1 |
| Следящая система | 1973 |
|
SU452804A1 |
| Следящая система | 1982 |
|
SU1107105A1 |
