Изобретение относится к автоматике и вычислительной технике и может быть использовано при проектировании автоматических устройств, . Известна следящая система, содержащая грубый и точный каналы, соединённые между собой через повышающую редукцию за счет механического повышающего редуктора или многополосности датчиков и приемников точного канала С 1 . Недостатком такой системы являetся невозможность контроля элементов, входящих в ее состав. Наиболее близким техническим решением к изобретению является следящая система, содержащая последовател но соединенные датчик грубого канала приемник грубого канала, блок синхронизации, усилитель, двигатель, также последовательно соединенные датчик и приемник точного канала, подключенный к второму входу блока синхронизации и связанный через первый редуктор с двигателем, приемник грубого канала подключен к приемнику точного канала через второй редуктор а датчик грубого канала подсоединен через третий редуктор Г2. Недостатком известной системы явля ется низкая надежность, так как невозможно осуществить автоматизированный контроль всех блоков, входящих в состай следящей системы, непосредственно перед началом работы. Цель изобретения - повышение надежности системы. Поставленная цель достигается тем что в следящую систему, содержащую последовательно соединенные датчик грубого канала, приемник грубого канала, блок синхронизации, усилитель, двигатель, а также последовательно соединенные датчик и приемник точног канала, подключенный к второму входу блока синхронизации и связанный через первый редуктор с двигателем, пр емник грубого канала подключен к при емнику Точного канала через второй редуктор, датчик грубого канала подсоединен к датчику точного канала че рез третий редуктор, введены сигнали затор отказа, блок управления и посл довательно соединенные формирователь импульсов, счетчик импульсов и комму татор, при этом выход блока управления подключен к второму входу коммутатора, выход приемника точного канала - к первому входу формирователя импульсов, второй выход счетчика импульсов - к сигнализатору отказа, а вход системы через коммутатор соединен с входами датчиков точного и грубого каналов и вторым входом формирователя импульсов, На чертеже представлена структурная схема следящей системы. Устройство содержит последовательно соединенные датчик 1 грубого канала, приемник 2 грубого канала, блок 3 синхронизации, усилитель 4 и двигатель 5, а также последовательно соединенные датчик 6 точного канала, приемник 7 точного канала, подключенный к второму входу блока 3 синхронизации и связанный через первый редуктор 8 с двигателем 5. Датчик 1 грубого канала и приемник 2 грубого канала подключены соответственно через второй 9 и третий 10 редукторы к датчику 6 точного канала и приемнику 7 точного канала. Кроме того, система содержит сигнализатор 11 отказа, блок 12 управления, а также последовательно соединенные формирователь 13 импульсов, счетчик 14 импульсов и коммутатор 15, включенный между входами системы и входами датчиков 1 и 6 грубого и точного каналов. При зтом выход блока 12 управления подключен к второму входу коммутатора 15, первый вход форми$)ователя 13 ймпуЛьсов связан с выходом приемника 7 точного канала, а второй выход счетчика 13 импульсов соединен с сигнализатором 11 отказа, Датчик 1 и приемник 2 грубого канала, а также датчик 6 и приемник 7 точного канала представляют собой синусно-косинусные трансформаторы СКТ. Блок 3 синхронизации обеспечивает переключение работы следящей систесы с грубого канала на точный, и наоборот. Усилитель 4 обеспечиЬйет усиление сигналов, поступающих с приемников грубого и точного каналов чррез блок синхронизации для управления двигателем. Двигатель 5 и редуктор 8 могут быть выполнены конструктивно совмещенными и представляют собой унифиированные элементы автоматики и выислительной техники. Второй и третий едукторы 9 и 10 обеспечивают переда
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая следящая система | 1975 |
|
SU702347A2 |
| Следящая система | 1975 |
|
SU555377A1 |
| Следящая система | 1984 |
|
SU1216774A1 |
| Следящая система | 1981 |
|
SU999016A1 |
| Следящая система | 1979 |
|
SU903803A2 |
| Устройство позиционного программ-НОгО упРАВлЕНия | 1978 |
|
SU807228A1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2013 |
|
RU2563333C2 |
| ВСЕСОЮЗНАЯ ^^_^_|^'t\'i'^'^jTjШ'•i''^•'A-•^''''^" '* ^''дБЛИО'-^НКА | 1971 |
|
SU318906A1 |
| Многоканальный преобразователь код-угол | 1975 |
|
SU526935A1 |
| Трехканальная резервированная следящая система | 1979 |
|
SU877806A1 |
СЛЕДЯП1АЯ СИСТЕМА,,содержащая последовательно соединенные датчик грубого канала, приемник грубого каналаJ блок синхронизации, усилитель, .двигатель, а также последовательно соединенные датчик,и приемник точного канала, подключенный к второму входу блока синхронизации и связанный через первый редуктор с двигателем, приемник грубого канала подключен к приемнику точного канала через второй редуктор, датчик грубого канала подсоединен к датчику точного канала через третий редуктор, отличающаяся тем, что, с целью пог. вышения надежности системы, в нее введены сигнализатор отказа, блок управления и последовательно соединенные формирователь импульсов, счетчик импульсов и коммутатор, причем выход блока управления подключен к второму входу коммутатора, выход приемника точного канала - к первому входу формирователя импульсов, второй выход счетчика импульсов - к сигнализатору отказа, а вход системы через коммутатор соединен с входами датчиков точного и грубого каналов и вторым входом формирователя импульсов. О СП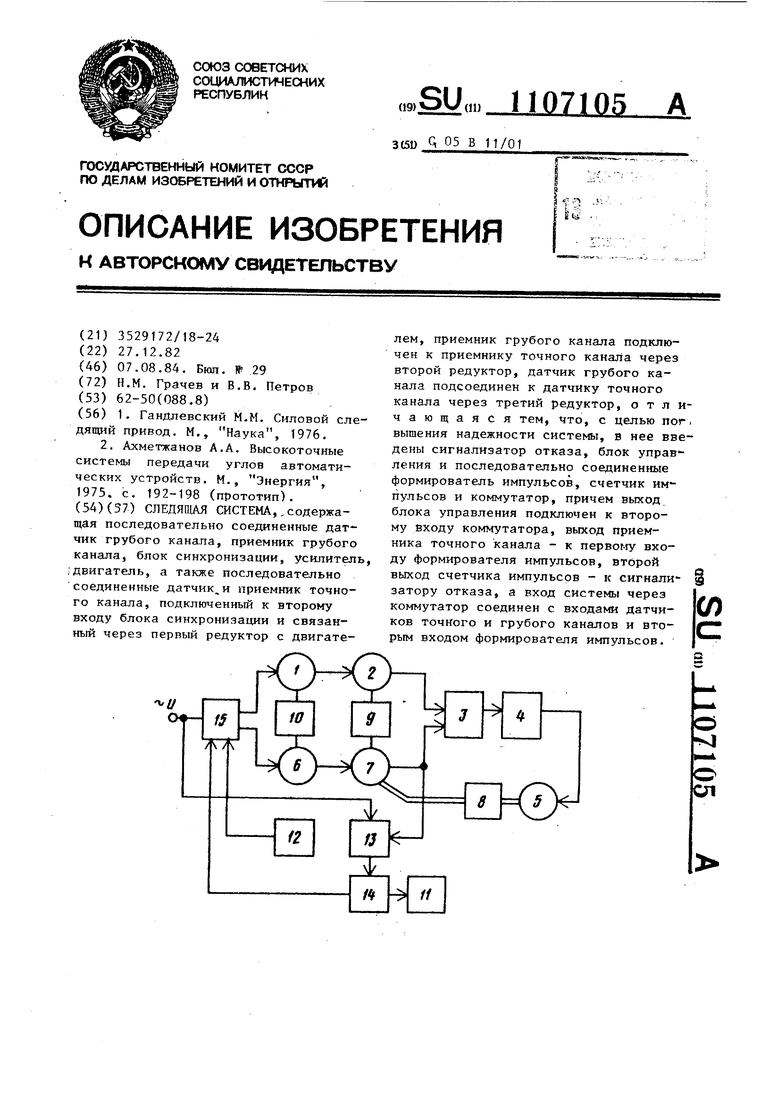
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Гандлевский М.М | |||
| Силовой следящий привод | |||
| М., Наука, 1976 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Ахметжанов А.А | |||
| Высокоточные системы передачи углов автоматических устройств | |||
| М., Энергия, 1975 | |||
| с | |||
| Вагонный распределитель для воздушных тормозов | 1921 |
|
SU192A1 |
