Изобретение относится к автоматическому регулированию и управлению.
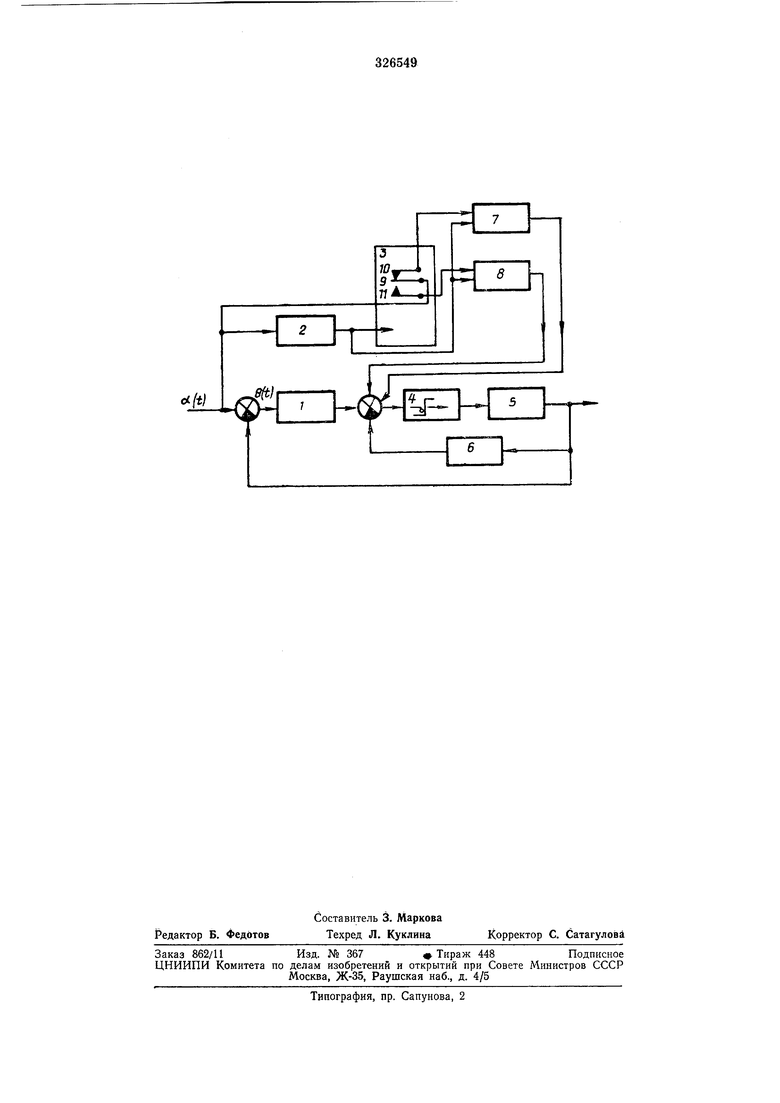
Известны автоколебательные самонастраивающиеся следящие системы, содержащие связанные со входом системы дифференциатор и замкнутый контур регулирования из последовательно соединенных усилителя, сумматора, релейного блока и двигателя, выход которого через статический блок подключен к сумматору.
Цель изобретения-повышение точности вос11 роизведения меняющегося уиравляюп1,его воздействия автоколебательной реле1июй следящей системой в установившемся динамическом режиме при различных скоростях изменения управляющего воздействия.
Предлагаемая система отличается тем, что она содержит поляризованное реле, обмотка которого подключена к выходу дифференциатора, и два нелинейных преобразователя, выходы которых соединены с сумматором, а входы- с выходом дифференциатора и с непол вижными контактами реле, подвижный контакт которого связан со входом дифференциатора.
teJib 5, статический блок 6, нелинейные преобразователи 7, 8 с переменным коэффициентом усиления, зависящим от скоросги изменения управляющего воздействия, неподвижиый 9 и подвижные 10, 11 контакты реле 3.
Нелинейные преобразователи 7 и 8 имеют по два входа, на один из которых поступает через контакты реле 3 управляющее воздействие а (г), на другой - сигнал, пропррциональный скорости управляющего воздействия, получаемый с помощью дифференциатора 2. Реле 3 срабатывает при определенной скорости (пороговом значении) управляющего воздействия, когда выходной сигнал дифференциатора достигает определепной величины.
Передаточные функции блоков системы соответствуют следующим выражениям в операционной форме;
1-1.()
У 1/ -г 1
2-1Г,(Я)чЯ 4-W(P) Bslgn
5 - W,(P)
(ТзР + 1) я 6 - Wt Кос
где Ki, K,z, Кос, Ti-коэффициенты усиления усилителя 1, двигателя 5 статического блока 6 в цепи обратной связи и дифференциатора 2 соответственно; Ti, TZ - постоянные времени;
В-величина выходного сигнала
звена 4; Р - оператор Лалласа.
При a:(t)Cit, где Ci -скорость изменения управляющего воздействия, амллитуда колебательной составляющей ошибки в такой системе определяется выражением
С) /л л рпо - )Gi - °ST,(K, +/Сое)
где:,;Х:Р;.
д 45/Са71(Г,А:1-ГЛос) . К.,К .
ЧП +Tt)Q / + 1
И - частота автоколебаний;
То - коэффициент позиционной связи по
управляющему воздействию; /Сн-эквивалентный линейный коэффициент усиления нелинейного эвена с релейной характеристикой, обусловленный вибрационным сглаживанием. С другой стороны, составляющая ошибки, обусловленная медленно меняющимся управляющим воздействием, определяется выражением;
eM{/)oCi +-DiCi,
где DU - коэффициент ошибки по положению; Di - коэффициент ошибки по скорости, причем, 1)(TO) (т;о).
Амплитуда суммарной ошибки является функцией параметров замкнутого контура, параметров связи и скорости изменения управляющего воздействия.
С одной стороны введение позиционной связи ,по управляющему воздействию уменьшает составляющую ошиб-ки, обусловленную скоростью изменения управляющего воздействия, с
другой стороны увеличивает колебательную составляющую ошибки. Для каждого значения скорости измерения управляющего воздействия существует определенное значение коэффициента, соответствующее минимуму максимального значения суммарной ошибки. Это оптимальное значение можно найти из уравнения
д& IMkLMU - о
д-.цЙТ(,
Найденное из этого уравнения оптимальное значение зависит от скорости Ci изменения управляющего воздействия. Поскольку при скоростях ,, где Cj -пороговое значение скорости, должно быть отрицательным, а при положительным, то для изменения тодр необходимы два нелинейных звена 7 и S. Звено 7 работает при скоростях , а звено 8 - при , .Для переключения служит реле . Звенья 7 и S представляют собой усилители с переменным коэффициенто.м усиления, зависящим от напряжения, пропорционального скорости изменения управляющего воздействия.
Предмет изобретения Автоколебательная самонастраивающаяся
следящая система, содержащая связанные со входом системы дифференциатор и замкнутый контур регулирования из .последовательно соединенных усилителя, сумматора, релейного блока и двигателя, выход которого через статический блок .подключен к сумматору, отличающаяся тем, что, с целью Повышения точности воспроизведения медленно меняющегося управляющего воздействия, она содержит поляризованное реле, обмотка которого подключена к выходу дифференциатора, и два нелинейных преобразователя, выходы которых соединены с сумматором, а входы - с выходом дифференциатора и с неподвижными контактами реле, подвижный контакт которого связан со входом дифференциатора.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛЕДЯЩАЯ СИСТЕМА | 1973 |
|
SU407286A1 |
| СЛЕДЯЩАЯ СИСТЕМА С НЕЛИНЕЙНОЙ КОРРЕКЦИЕЙ | 1971 |
|
SU318907A1 |
| Следящая система | 1980 |
|
SU941925A1 |
| РЕЛЕЙНЫЙ ПНЕВМО-ГИДРОПРИВОД С ВИБРАЦИОННОЙ ЛИНЕАРИЗАЦИЕЙ СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2003 |
|
RU2243491C1 |
| Устройство автоматического регулирования толщины полосового проката | 1982 |
|
SU1068193A1 |
| СИСТЕМА С ПЕРЕМЕННОЙ СТРУКТУРОЙ | 1972 |
|
SU332435A1 |
| Частотно-импульсный регулятор | 1985 |
|
SU1287100A1 |
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР С ОГРАНИЧЕНИЯМИ ВЫХОДНЫХ СИГНАЛОВ | 1999 |
|
RU2156992C1 |
| УСТРОЙСТВО для РЕГУЛИРОВАНИЯ ПРОЦЕССАСОЛОДАЗАТИРАНИЯ | 1970 |
|
SU260572A1 |
| НЕЛИНЕЙНОЕ КОРРЕКТИРУЮЩЕЕ УСТРОЙСТВО | 1969 |
|
SU251653A1 |