. :: . :л:/ Предлагаемое изобретение отИосится к области управления оптическими объектами (в частности, зеркалами раэлич.вых имитаторов и измерительных йриборов при их юстировке) или друрймй устройствами автоматики, в которых требуется обеспечить высокую разрешающую г способность по утЯрвому или пйнейному перемещению объекта pefyjiiipoвания. с .-; - - -- . Известны следящие системы, йЬдёржа щие измеритель сигнала ошибки, Влок формирования сигнала управления, исполнительный механизм, oxBia4eHHbifi обратной Связью, механические передачи иобъект регулирования ll . Механические передачи системы та-. кого вида содержат подпружиненныйрычаг, который с помощью тяг соеданен с объектом регулирования и который ша нирно закреплен на опоре t2l. Пружины в известных механических передачах применяются для компенсации различного рода люфтов.. Одншсо использование для целей микропбремеЩёййй в следящей системе традиционных решений неприемлемо по следующей причине. Следящая система микроперемещений должна иметь большой коэффициент усиления, для того чтобы обеспечить иаль1е Линейные перемещения порядка долей микрометра или угловые перемещения порядка долей секунды. Однакр при значительном коэффициенте усиления системы возникают трудности .обеспечения устойчивости ее работы. Устойчивость работы системы может быть обеспечена при вьшолнении определенных требованиях, предъвляемых к механической передаче: а) отсутствие люфтов, б) монотонная зависимость перемещения выходной координаты от входного воздействия в диапазоне малых величин. Обычные передачи, например, с зубчатыми колесами на валу объекта и подцишнигсами трения или качения в осях неприемлемы из-за неидеальности KOHTaK-ivных поверхностей деталей, имеющих взаимное, перемещение.
, Из известных систем наиболее близ- j кой по технической сущности к предлагав- , мой является следящая система, содержащая последовательно соединенные блок выделения,сигнала ошибки, вход которо го соединен с подпружиненным объек-10
том, формирователь сигнала управления, сумматор и исполнительный двигатель, выход которого через корректирующее устройство соединен со вторым входом сумматора и непосредственно со входом 15 преобразователя вращательного движения в поступательное, выход которого механически связан с рычагом который с мощью тяги жестко соединен о объектом 3. .20
Недостатком известной системы я&ляются её низкие разрешающая способность и точность из-за наличия люфтов вшарнирных опорах механической передачи.25
Целью настоящего изобретения является пОвышенне точности и разрешающей способности системы.
Поставленная цель достигается тем, что в системе рычаг жестко закреплен 30 в опоре.
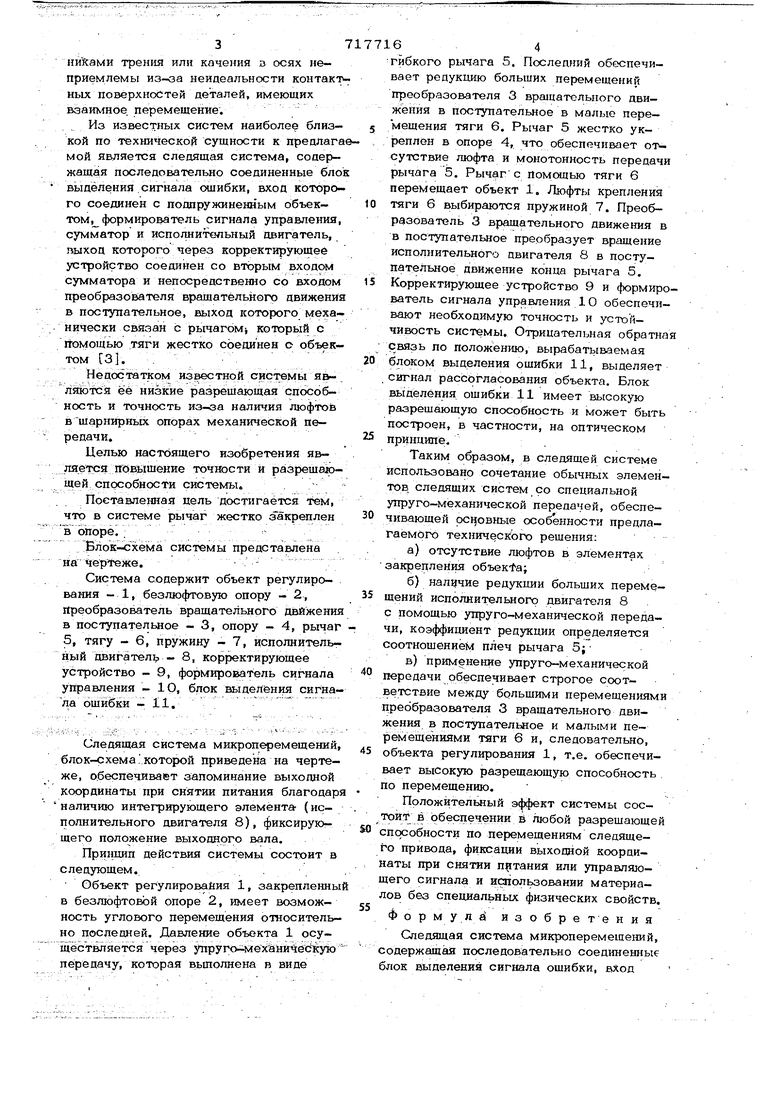
Блок-схема системы представлена на .Система содержит объект регулирования - 1, безлюфтовую опору - 2,35 преобразователь вращательного движения в поступательное - 3, опору - 4, рычаг 5, тягу - 6, пружину - 7, исполнительг ный двигателе - 8, корректирующее устройство - 9, формирователь сигнала О управления - 1О, блок выделения сигнала ощйёки - 11.
Следящая система микроперемещений, д лок-схем а .которой приведена на чертеже, обеспечивает запоминание выходной оординаты при снятии питания благодаря аличию интегрирующего элемента- (ис- . олнительного двигателя 8), фиксирую- „. его положение выходного вала,
Принхшп действия системы состоит в ледующем...
Объект регулировайия 1, закрепленный в безлюфтовой опоре 2, имеет возмож- jg ность углового перемещения относительно последней. Давление объекта 1 осуществляется через упруго-мехйнйческую передачу, которая вьшолнена в виде
гибкого рычага 5. Последний обеспечивает редукцию больших перемещений преобразователя 3 вращательного движения в поступательное в малые перемещения тяги 6, Рычаг 5 жестко укреплен в опоре 4, что обеспечивает отсутствие люфта и монотонность передачи рычага 5. Рычдг с Помощью тяги 6 перемещает объект 1. Люфты крепления тяги 6 выбираются пружиной 7. Преобразователь 3 вращательного движения в в поступательное преобразует вращение исполнительного двигателя 8 в поступательное движение конца рычага 5, Корректирующее устройство 9 и формирователь сигнала управления 10 обеспечивают необходимую точность и устойчивость системы. Отрицательная обратна связь по положению, вырабать1ваемая блоком выделения ошибки 11, выделяет , сигнал рассогласования объекта. Блок выделения ошибки 11 имеет высокую разрешающую способность и может быть построен, в частности, на оптическом принципе,.
Таким образом, в следящей системе использовано сочетание обычных элементов, следящих систем со специальной упруго-механической передачей, обеспечивающей основные особенности предлагаемого технического решения:
а)отсутствие люфтов в элементах закредленнл объекфа;
б)налцчие редукции больших перемещений исполнительного двигателя 8
с помощью упруго-механической передачи, коэффициент редукции определяется соотношением плеч рычага 5;
в)применение упруго-механической передачи обеспечивает строгое соответствие между большими перемещениями преобразователя 3 вращательного движения в поступательное и малыми перемещениями тяги б и, следовательно, объекта регулирования 1, т,е. обеспечивает высокую разрешающую способность по перемещению.
Положительный эффект системы состоит в обеспечении ё любой разрешающей спсюобности по перемещениям следящего привода, фиксации выходной координаты при снятии питания или управляющего сигнала и использовании материалов без специальных физических свойств. Формула изобретения Следящая система микроперемещений, содержащая последовательно соед1шенныб блок к шеления сигнала ощибки, вход
котх)рого соединен с объектом, формйро-. вятель сигнала управления, сумматор и исполнительный двигатель, выход которого через корректирующее устройство соединен со Вторым входом сумматора
и непосредственно со входом преобразователя вращательного движения в поступательное, выход которого механически связан с рычагом, который с помощью тяги жестко соединен с объектом, о т л и ч а ю щ а я с я тем, что, с целью повышения точности и разрешающей способности системы, в ней рычаг ;кёстк6 закреплен в опоре.
Источники информации, принятые во внимание при экспертизе
1.Бесекерский В. А. и др. Теория систем автоматического регулирования, М., Наука, 1972, с. 18-24.
2.Авторское свидетельство СССР № 573720, кл. G 01 F 23/20, 07.03.75.
3.Бесекерский В. А. и др. Теория систем автоматического регулирования,
М., Наука, 1972, с. 9-14 (прото тип).

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |
| Система автоматического управления телескопом | 1980 |
|
SU974334A1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СЛЕДЯЩАЯ СИСТЕМА | 2000 |
|
RU2168753C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ И УГЛОВЫХ ПЕРЕМЕЩЕНИЙ ПРИ ДИАГНОСТИКЕ АВТОТРАНСПОРТНЫХ СРЕДСТВ | 2002 |
|
RU2210068C1 |
| Следящая система с компенсацией лифта механической передачи | 1976 |
|
SU620940A1 |
| Следящий привод с коррекцией люфта в механической передаче | 1976 |
|
SU647646A1 |
| Исполнительный механизм поддержания заданного положения стопора металлургической емкости | 1981 |
|
SU944765A1 |
| Следящая система | 1977 |
|
SU732807A1 |
| Следящий электропривод с компенсацией люфта | 1985 |
|
SU1273875A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2114455C1 |
JiW//
//
