По основному авт. св. № 256628 известен миоговилочный захват к погрузчику, навешиваемый на каретку грузоподъемника, включающий раму, две секции четных и нечетных внл, связанных между собой осью и соединенных с силовым нриводом, сообщающим вилам колебательные движения с помощью коленчатого вала и шатуна.
Предлагаемый многовилочиый захват отличается от известного тем, что обе секции вил в верхней части снабжены коромыслом, укрепленным на оси рамы захвата, а у основания обе секции вил установлены на приводном валу, опирающемся на раму концентричными шейками и на основание каждой секции БИЛ- эксцентричными шейками, выполненными в одной осевой плоскости, при этом приводной вал соедииен червячной передачей с гидродвигателем, расположенным на раме захвата.
Такая конструкция многовилочного захвата обеспечивает сохранность тарно-штучных грузов при их перегрузке за счет придания вилам безвибрационных возвратно-поступательных движений с подъемом н опусканием их в вертикальной плоскости, совершаемых каждой секцией вил иоследовательно для взятия груза на вилы и его сталкивания поочередным продвижением каждой секции вил под основанием груза вместе с движением ногрузчика.
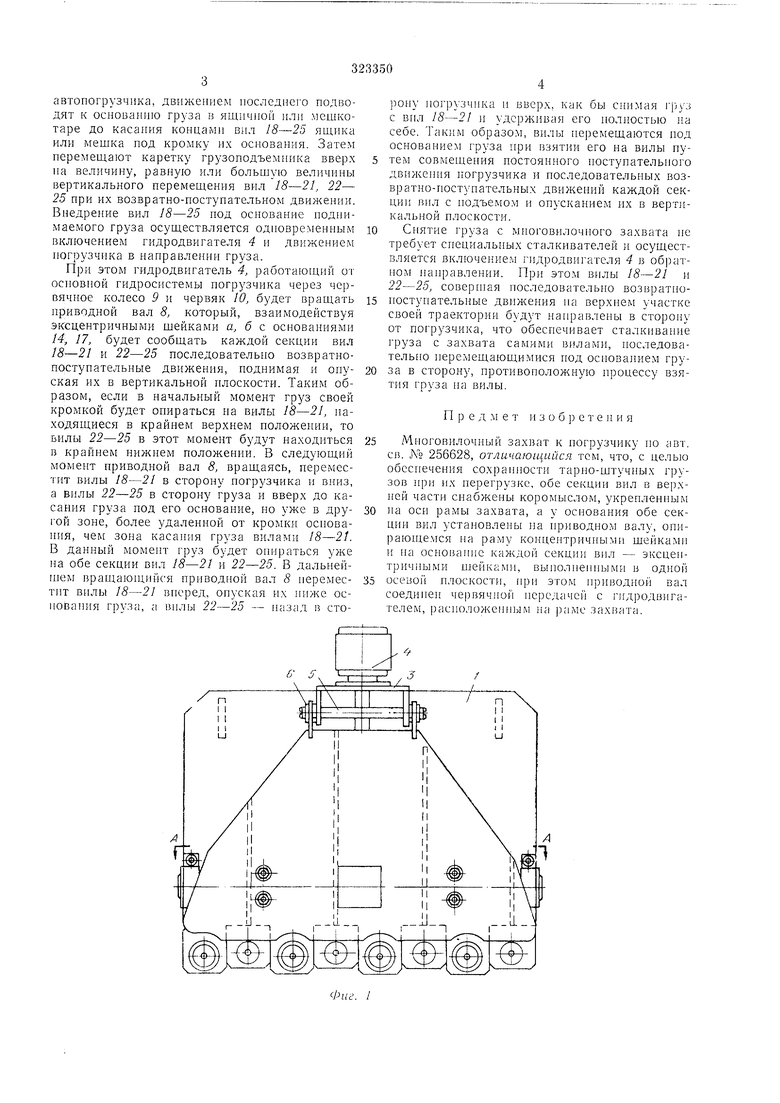
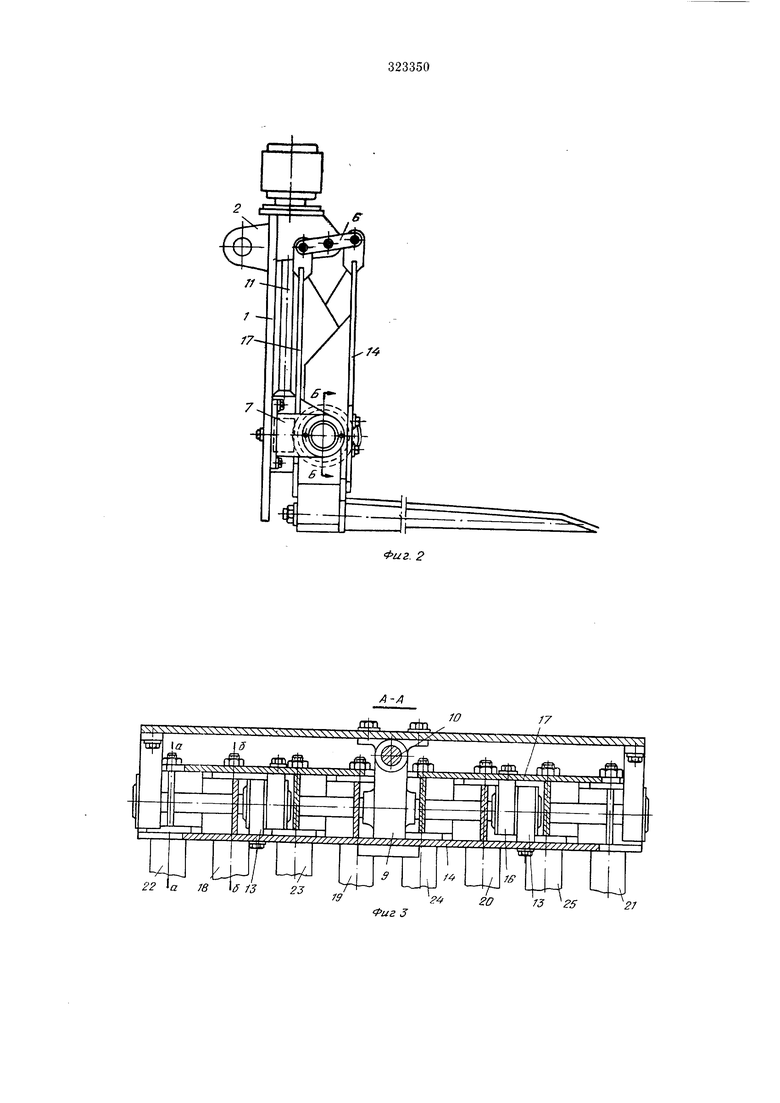
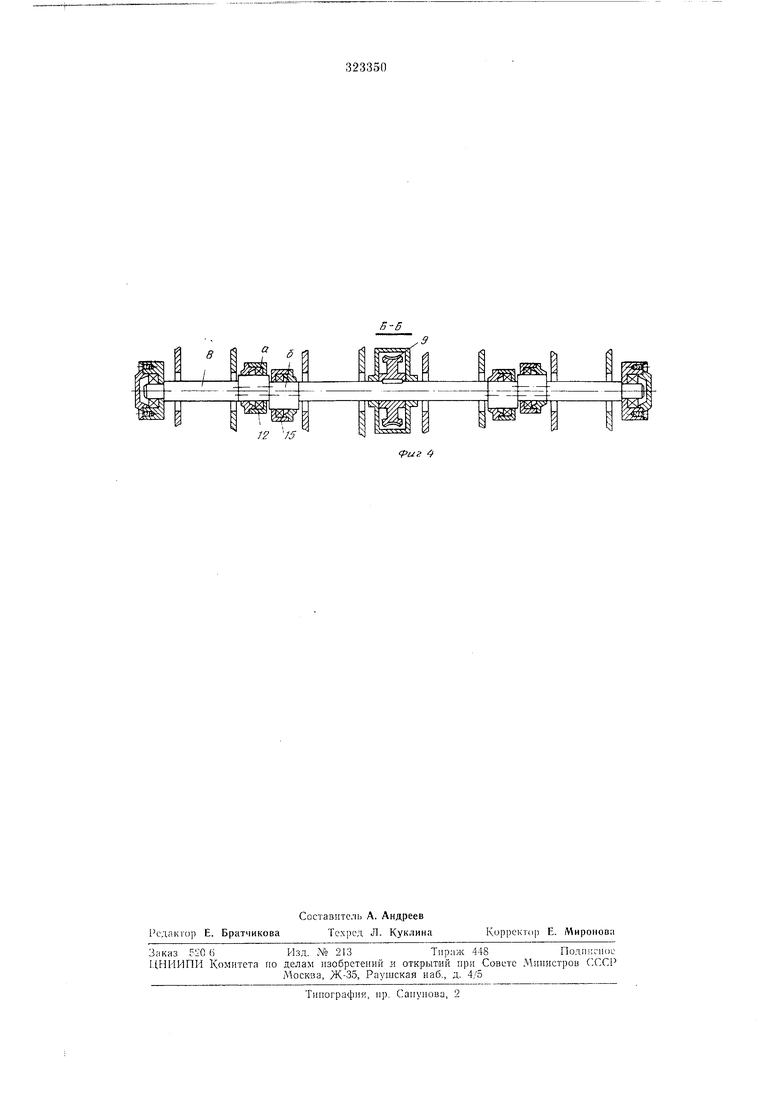
Па фнг. 1 показан оннсываемыи захват к погрузчику, вид спереди; на фиг. 2 - то же, вид сбоку; на фиг. 3 - разрез по .4-.4 на фиг. 1; на фиг. 4 - разрез по Б-Б на фиг. 2. Л1ноговилочный захват содержит раму /, которая кренится на каретке грузоподъемника (на фиг. не показан) посредством двух ироушнн 2. В верхней частн рамы / имеется кронштейн 3 нод установку гидродвигателя 4 и
оси 5 с двумя коромыслами 6. В нижней частн рамы 1 имеются два кронштейна 7 нод установку приводного вала 8, выполненного с червячным колесом 9 и двумя иарамн эксцентричных шеек а и б, расположенных в одной осевой плоскости. Прп этом червячное колесо 9, взаимодействующее с червяком 10, соединено промежуточным валом 11с гидродвнгателем 4. Две эксцентричных шейки а опираются иа подшипники 12 в кронштейнах 13, которые закренлеиы на основании 14. Две другие эксцентрнчиые шейки б опираются на подшии1нгки 15 в кронштейнах 16, которые закренлены
на другом основании 17.
Основания 14 и 17 в верхней части соединены шарнирно с двумя коромысламн 6. В нижней части осиовання 14 укренлеиы вилы 18, 19, 20, 21, а иа основании /7 укренлены вилы 22, 23, 24, 25. Многовилочный захват, подвешенный носавтопогрузчика, движением последнего ПОДЕЮдят к осиованию груза в ящичной или мешкотаре до касания концами вил 18-25 ящика или мещка иод кромку их основания. Затем перемещают каретку грузоподъемника вверх иа величину, равную или большую величины вертикального перемещения вил 18-21, 22- 25 при их возвратно-поступательном движении. Внедрение вил 18-25 под основание подни.маемого груза осуществляется одновременным включением гидродвигателя 4 и движением погрузчика в направлении груза.
При этом гидродвигатель 4, работающий от основной гидросистемы погрузчика через червячное колесо 9 и червяк 10, будет вращать приводной вал 8, который, взаимодействуя эксцентричными щейками а, б с. основаниями 14, 17, будет сообщать каждой секции вил 18-21 и 22-25 последователь 1о возвратнопоступательные движения, поднимая и оиуекая их в вертикальной плоскости. Таким образом, если в начальный момент груз своей кромкой будет опираться на вилы 18-21, находящиеся в крайнем верхнем положении, то вилы 22-25 в этот момент будут находиться в крайнем нижнем положенни. В следующий момент приводной вал 8, вращаясь, переместит вилы 18-21 в сторону погрузчика и вниз, а вилы 22-25 в сторону груза и вверх до касания груза под его основание, но уже в другой зоне, более удаленной от кромки основания, чем зона касания груза вилами 18-2. В данный момент груз будет опираться уже на обе секции вил 18-21 и 22-25. В дальнейшем вращаюнд,нйся прнводной вал с нере.месТИТ вилы 18-21 вперед, опуская их ниже основания груза, а вилы 22-25 - назад в сторону погрузчика и вверх, как бы снимая Ifjya с вил 18-21 и удерживая его иолностью на себе. Таким образо.м, вилы перемещаются под основанием груза при взятии его на вилы путем совмеще ия постоянного поступательного движения погрузчика и последовательных возвратно-поступательных движений каждой секции вил с подъемом и опусканием их в вертикальной плоскости.
Снятие груза с многовилочного захвата не требует снециальных сталкивателей и осуществляется включением гидродвигателя 4 в обратном направлении. При этом вилы 18-21 и 22-25, совергная носледовательио возвратноноступательные движения на верхнем участке своей траектории будут направлены в сторону от погрузчика, что обеспечивает сталкивание груза с захвата самими вилами, последовательно перемещающимися под основанием груза в сторону, противоположную процессу взятия груза на вилы.
Пред .1 е т и 3 о б ) е т е и я
Многови.точный к погрузчику по авт. св. 256628, отличающийся тем, что, с целью обесггечения сохра1П10сти тарпо-щтучных грузов при их перегрузке, обе секции вил в верхней части снабжены коромыслом, укрепленным на оси рамы захвата, а у основания обе секции вил установлены па приводном валу, опирающемся на раму концентричными шейкамн и на основание каждой секции вил - эксцентричными щейками, выполненными в одной oceuoii плоскости, при этом прнводной вал соединен червячной передачей с гидродвигателем, расиоложе1П1)1М на раме захвата.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОВИЛОЧНЫЙ ЗАХВАТ К ПОГРУЗЧИКУ | 1971 |
|
SU291865A1 |
| ВИБРАЦИОННЫЙ ВИЛОЧНЫЙ ЗАХВАТ К ПОГРУЗЧИКУ | 1969 |
|
SU236312A1 |
| НАПОЛЬНЫЙ КРАН-ШТАБЕЛЕР | 1972 |
|
SU327109A1 |
| Грузоподъемник крана-штабелера | 1990 |
|
SU1733347A1 |
| ТРАНСПОРТНОЕ УСТРОЙСТВО АВТОМАТИЗИРОВАННОГОСКЛАДА | 1971 |
|
SU299418A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО К ПОГРУЗЧИКУ ДЛЯ ПАКЕТАКИРПИЧА | 1969 |
|
SU234225A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО ВИЛОЧНОГО ПОГРУЗЧИКА | 1991 |
|
RU2011636C1 |
| БУРОРЫХЛИТЕЛЬНОЕ УСТРОЙСТВО | 1991 |
|
RU2009993C1 |
| ГРУЗОПОДЪЕМНИК ПОГРУЗЧИКА | 2016 |
|
RU2611675C1 |
| Вилочный погрузчик | 1986 |
|
SU1370062A1 |
73 25 12 75
