(21)4033155/27-11
(22)07.03.86
(46) 30.01.88. Бюл. № 4 (75) Б.Н.Ванчинов
(53)621.865(088.8)
(56)Патент Канады № 1166997, кл. В 66 F 9/12, 1984.
(54)ВИЛОЧНМЙ ПОГРУЗЧИК
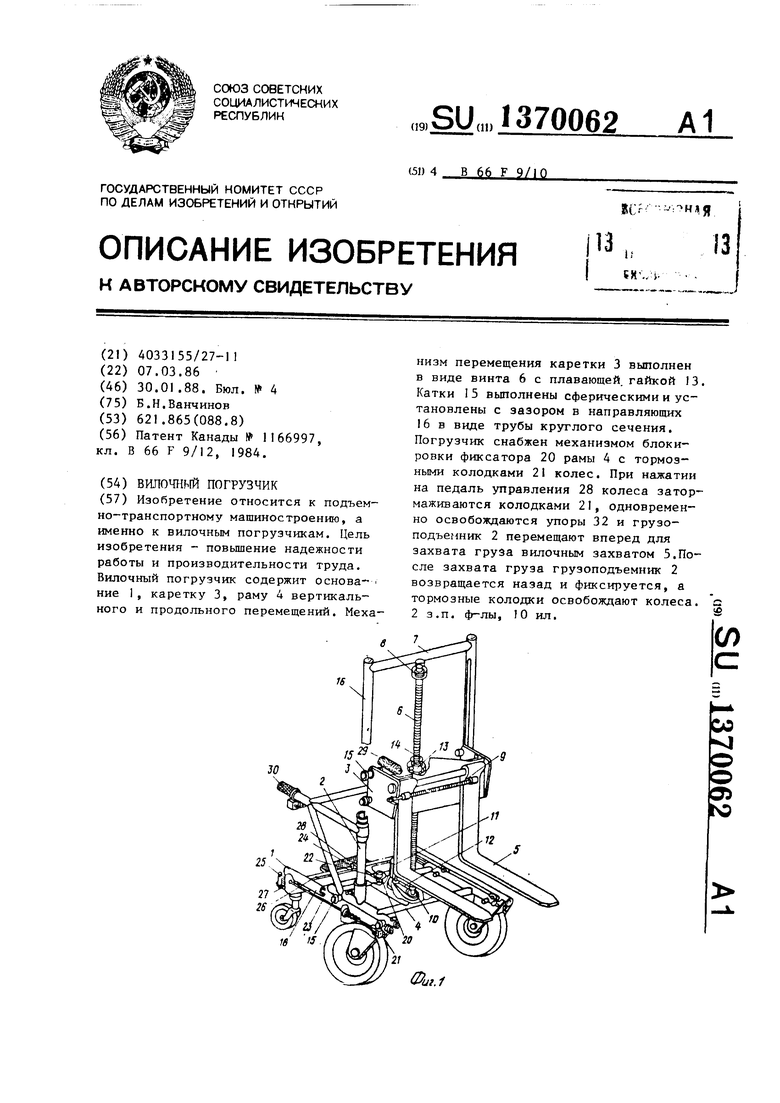
(57)Изобретение относится к подъемно-транспортному машиностроению, а именно к вилочным погрузчикам. Цель изобретения - повышение надежности работы и производительности труда. Вилочный погрузчик содержит основа- ние 1, каретку 3, раму 4 вертикального и продольного перемещений. МехаfS
30
низм перемещения каретки 3 выполнен в виде винта 6 с плавающей, гайкой 13. Катки I5 выполнены сферическими и установлены с зазором в направляющих 16 в виде трубы круглого сечения. Погрузчик снабжен механизмом блокировки фиксатора 20 рамы 4 с тормозными колодками 21 колес. При нажатии на педаль управления 28 колеса затормаживаются колодками 21, одновременно освобождаются упоры 32 и грузоподъемник 2 перемещают вперед для захвата груза вилочным захватом 5.После захвата груза грузоподъемник 2 возвращается назад и фиксируется, а тормозные колодки освобождают колеса. 2 а.п. ф-лы, I О ил.
(Л
Й/л/
Изобретение относится к подъемно- транспортному машиностроению, а именно к вилочным погрузчикам.
Цель изобретения - повышение надежности работы и производительности труда.
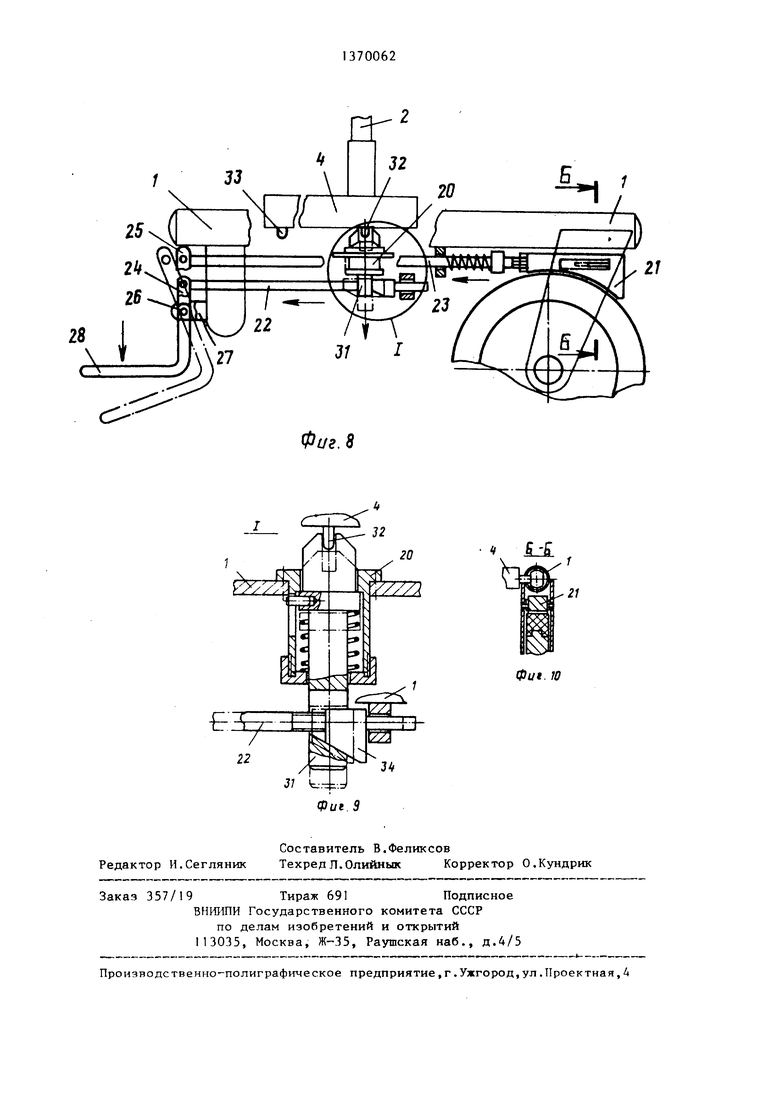
На фиг.1 изображен общий вид вилочного погрузчика; на фиг.2 - кинематическая схема механизма вертикального перемещения каретки грузоподъемника; на фиг.З - установка гайки механизма вертикального перемещения каретки; на фиг,4 - вид А на фиг.З; на фиг, 5 - каток кареток; на фиг.6 - схема работы катка каретки вертикального перемещения при равномерной загрузке груза; на фиг.7 - то же, при неравномерной загрузке груза или поперечных наклонах погрузчика; на фиг.8 - механизм блокировки фиксатора горизонтальной рамы продольного перемещения с тормозными колодками передних колес; на фиг.9 - узел I на фиг.8; на фиг,1 О - сечение Б-Б на фиг.8.
Вилочный погрузчик содержит основание 1 и грузоподъемник 2. Основание 1 снабжено двумя парами колес. Грузоподъемник 2 снабжен кареткой 3, смонтированной с возможностью вертикального перемещения, и закреплен на горизонтальной раме 4, установленной с возможностью продольного перемещения относительно основания 1. Каретка 3 снабжена вилочным захватом 5, приводом вертикального перемещения в виде винта 6, подвешенного к верхней траверсе 7 грузоподъемника 2 с помощью, например, упорного подшипника 8.
Вилочный захват 5 снабжен механизмом раздвигания вил, вьтолненным в виде винта 9 с разноименными резьбам и гайками. Винт 6 привода вертикального перемещения каретки 3 в нижней части снабжен опорой в виде шарикового радиально-упорного подшипника 1 О и связан с электродвигателем 11 кли- ноременной передачей 12. На винте 6 установлена гайка 13, размещенная в корпусе 14. Корпус 14 жестко связан с кареткой 3 вертикального перемещения. Опорная поверхность гайки 13 и контактирующая поверхность корпуса 1 вьтолнены сферическими с центром сферической поверхности, расположенным на оси 00 вращения цилиндрических шипов, которыми снабжена гайка 13,а в
5
0
5
0
5
0
5
0
5
корпусе 14 вьтолнены вертикальные пазы, которые препятствуют проворачиванию гайки 13 в корпусе 14, такое соединение гайки 13 с корпусом 14 дает возможность совершать плавающие движения корпуса 14 с кареткой 3 относительно оси 00 для компенсации перекосов от неравномерной загрузки груза и рельефа местности.
Каретка 3 и горизонтальная рама 4 имеют катки 15, которые вьтолнены сферическими и установлены с зазором в направляющих 16, вьшолненных в виде трубы круглого сечения, Для регулирования зазора между катком 15 и направляющей 16 использованы прокладки 17 между фланцем оси катка I8 и фланцем опорной втулки 19, установленных в каретке 3 или раме 4.
Основание 1 снабжено механизмом блокировки фиксатора 20 рамы 4 продольного перемещения грузоподъемника 2 с тормозными колодками (тормозами) 21 передних колес основания 1. Фиксатор 20 и тормозные колодки 21 передних колес связаны соответствующими тягами 22 и 23 (их две) и рычагами 24 и 25 со штангой 26, установленной в кронштейных 27 основания 1. На штанге 26 установлена педаль управления 28 механизма блокировки.
Погрузчик снабжен рукоятками 29 и 30. Фиксатор 20 содержит подпружиненный шток 31, а рама 4 - упоры 32 и 33. С тягой 22 связан кулачок 34, установленный с возможностью взаимодействия с коническим пазом, вьтол- ненном в фиксаторе 20,
Устройство работает следующим образом .
Во время работы в исходном положении при отсутствии груза каретка 3 располагается в верхнем или в нижнем положении в зависимости от размещения обрабатьшаемого груза. Рабочий с помошдзю рукояток 29 и 30 подвозит погрузчик к месту производства работ и перемещает раму 4 грузоподъемника 2 в переднее крайнее положение, предварительно нажав ногой на педаль управления 28, затормаживая передние колеса тормозными колодками 21, установленными в направляющих пазах кронштейнов передних колес и приводимыми в движение тягами 23 и рычагами 25 и с помощью рычага 24 и тяги 22, перемещая подпружиненный шток 31 фиксатора 20 вниз и освобождая фиксирующий упор 32 каретки 4, Выдвинутая в переднее положение рама 4 фиксируется упором 33, педаль управления 28 освобождают от воздействия ноги.Включают электродвигатель I1 поворотом рукоятки 30 приводят во вращение вин 6 с помощью клиноременной передачи 12. При вращении винта 6 крутящий момент преобразуется в поступательное движение гайки 13, которое передается через опорную сферическую поверхность корпуса 1А на каретку 3. Каретка 3 с помощью катков 15 в направляющих 16 перемещается с вилочным захватом 5, устанавливая его на необходимую высоту в зависимости от расположения груза. Поворотом рукоятки 30 в нейтральное положение отключают электродвигатель 11. Вилочный захват 5 подводится под установленный на поддоне груз и захватьшает его. Затем поворотом рукоятки 30 включают электродвигатель 11 на Подъ ем до тех пор, пока вилочный захват 5 не воспримет на себя вес груза.
При равномерной загрузке вилочного захвата 5 катки 15 под воздействием груза прижимаются к направляющим 16 и стремятся занять среднее положение. Когда груз имеет боковое смещение центра тяжести или погрузчик наклоняется в сторону в зависимости от рельефа пола происходит незначительное боковое смещение катков 15 в направляющих 16 (фиг.7). В данном положении каток I5 сферической поверхностью катится по меньшему радиусу цилиндрической направляющей 16, реакция которой стремится возвратить каток 15 в среднее положение, чем предотвращается трение торцовых поверхностей катка I5 о поверхности направляющей 16. После захвата груза вилочным захватом 5 нажимается ногой педаль управления 28 и грузоподъемник 2 с грузом воздействием на рукоятки 29 и 30 перемещают в крайнее заднее положение, педаль управления 28 освобождают от воздействия ноги, тормозные колодки 21 передних колес растормаживаются, рама 4 фиксируется подпружиненным штоком 31 фиксатора 20 и упором 32. Регулировку зазоров между тормозными колодками 21 и передними колесами, а также поло.жения штока 31 фиксатором 20 относительно фиксирующих упоров 32 и 33 рамы 4 осуществляют резьбами, с помощью ко-
70062
торых тяги соединяются с тормозными колодками 21 передних колес и кулачком 32 фиксатора 20. Погрузчик с усJ- тановленным на вилочном захвате 5
грузом перемещают с помощью рукояток 29 и 30 до места разгрузки, затем нажимают педаль управления 28, каретка 4 вьщвигается вперед, фиксиру- 10 ется. Обрабатьшаемый груз путем перемещения каретки 3 с вилочным захватом 5 устанавливают на место назначения.
Плавающее соединение гайки винто- 15 вого привода с кареткой устраняет влияние неравномерности загрузки вилочного захвата, поперечных колебаний каретки и рельефа местности. Выполнение катков сферическими и установка 20 их в направляющих круглого сечения с возможностью регулировки зазора, между катком и направляющей позволяет устранить возможность заклинивания катков снижает их износ,дает возмож
25
ность при меньщих размерах катков и
сечения направляющих вьщepж iвaть болшие нагрузки за счет увеличения площади контакта. Установка системы блокировки с фиксатором рамы, управляе- 30 мой с помощью педали, значительно облегчает продольное перемещение до грузоподъемника относительно основания, повышает культуру обслуживания и производительность труда при выползу нении указанной операции.
Формула изобретения
1. Вилочный погрузчик, содержа- 40 щий опирающееся на колеса основание с горизонтальными направляющими, установленную с возможностью продольного перемещения по этим направляющи на катках горизонтальную раму, на 45 которой закреплен грузоподъемник с кареткой, смонтированной с возможностью вертикального перемещения по его направляющим на катках приводом, отличающийся тем, что, с 50 целью повышения надежности и производительности, он снабжен смонтированным на основании фиксатором указанной рамы и механизмом блокировки фиксатора с тормозами колес. 55 2. Погрузчик поп.1,отлича- ю щ и и с я тем, что катки выполнены сферическими и установлены с зазором с возможностью его регулирования в направляющих грузоподъемника
1
и основания, которые выполнены круглого сечения.
3. Погрузчик по п.1, о т л и - чающийся тем, что указанный механизм блокировки содержит три тяги, связанные одним концом посредством рычагов с горизонтальной педалью управления на штанге, которая закреплена в смонтированных на основании кронштейнах, другие концы двух тяг подпружинены и соединены с ука-
700626
ванными тормозами, а третьей тягой соединен с кулачком, установленным с возможностью взаимодействия с коническим пазом, который выполнен на указанном фиксаторе, при этом последний выполнен в виде подпружиненного штока, в верхней части которого выполнена прорезь и установленного 10 с возможностью вертикального прямолинейного перемещения и взаимодействия своей прорезью с упорами, которые закреплены на указанной раме.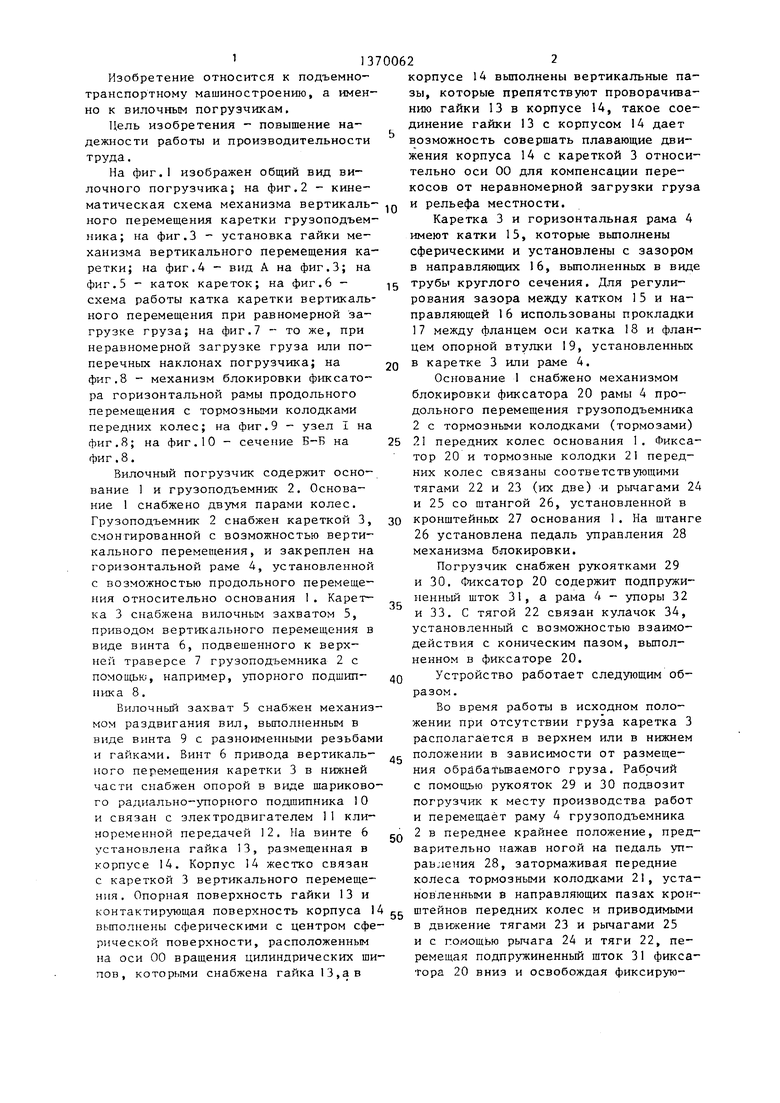

| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОВАЯ КАРЕТКА ГРУЗОПОДЪЕМНИКА ПОГРУЗЧИКА | 2024 |
|
RU2828413C1 |
| МАЛОГАБАРИТНЫЙ ЭЛЕКТРОПОГРУЗЧИК | 2012 |
|
RU2539442C2 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО ВИЛОЧНОГО ПОГРУЗЧИКА | 1991 |
|
RU2011636C1 |
| ПРИЖИМНОЕ УСТРОЙСТВО К ВИЛОЧНОМУ ПОГРУЗЧИКУ | 1991 |
|
RU2009994C1 |
| Бульдозерно-грейферный ковш к погрузчику | 1975 |
|
SU537945A1 |
| Навесной ковшовый захват к вилочному погрузчику | 1980 |
|
SU973473A1 |
| Грузоподъемник крана-штабелера | 1990 |
|
SU1733347A1 |
| БОКОВОЕ ЗАЖИМНОЕ УСТРОЙСТВО К ПОГРУЗЧИКУ | 1991 |
|
RU2011635C1 |
| Навесное устройство к погрузчику для перегрузки грузов в кипах | 1990 |
|
SU1791371A1 |
| ГРУЗОПОДЪЕМНИК ПОГРУЗЧИКА | 2016 |
|
RU2611675C1 |


Фut.3
ci
Фие.В
1370062
Вид А
фиг. 4
Фие.7
Фиг. 8
12
20
Фи. Ю
