Известно устройство для измерения .динамического тягового усилия электромагнитных устройств, содержащее датчик положения якоря, его упругую подвеску и вычислительную схему с двумя входами, преобразующую сигнал, пропорциональный изменению тока в катушке электромагнита, снимаемого с дифференциирующего трансформатора, и сигнал, пропорциональный перемещению якоря, снимаемый с указанного датчика положения, в напряжение, соответствующее тягой характеристике электромагнита.
Однако указанное устройство является сравнительно сложным и пригодно лищь для измерения тягового усилия постоянных электромагнитов с одной катушкой управления.
С целью упрощения конструкции и расширения функциональных возможностей использована вычислительная схема с входом от датчика положения якоря, состоящая из последовательно соединенных двух дифференцирующих усилителей н блока установления коэффициента передачи, пропорционального массе якоря, а также параллельно им включенного блока установления коэффициента передачи, пропорционального упругости подвески, и подключенных к общему сумматору, выдающему сигнал, пропорциональный действующей силе.
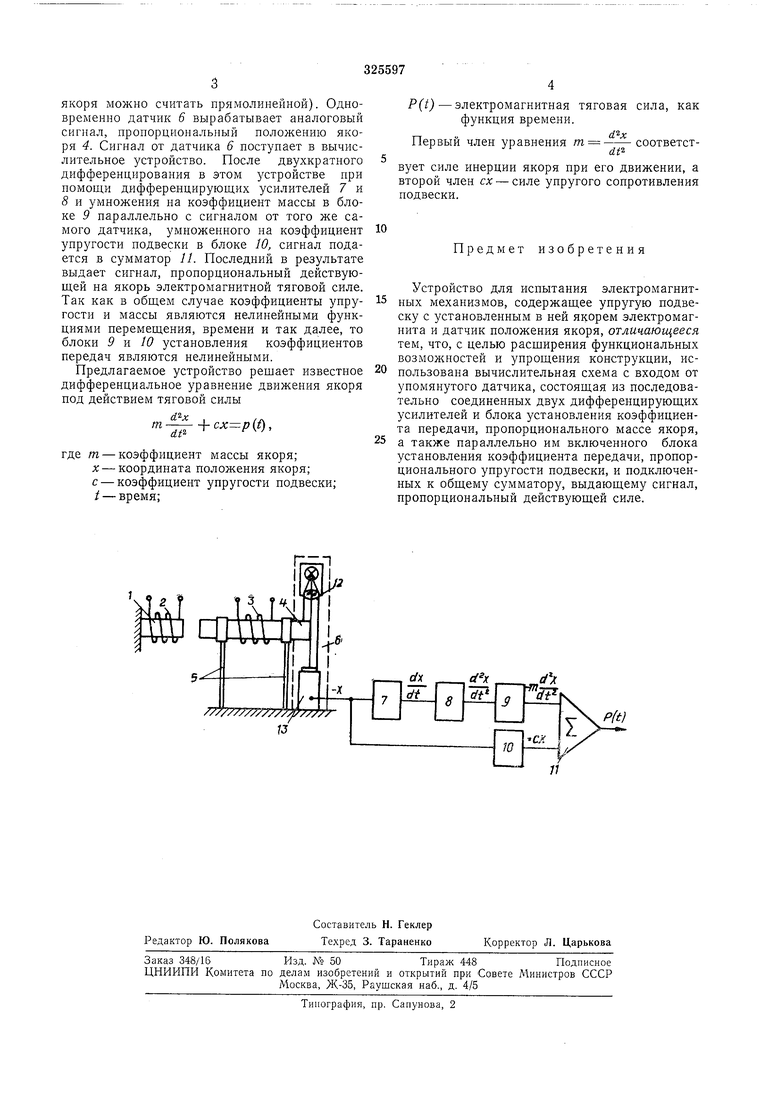
На чертеже изображена функциональная схема предлагаемого устройства для испытания электромагнитных механизмов.
В устройстве установлен испытываемый электромагнитный механизм, состоящий из сердечника 1, обмоток 2 и 3 и якоря 4. Якорь 4 данного механизма установлен на упругой подвеске 5, выполненной, например, в виде плоских пружин. Кроме того, устройство содержит датчик 6 положения, дифференциирующие усилители 7 и S и блок 9 установления коэффициента передачи, пропорционального массе, блок 10 установления коэффициента передачи, пропорционального жесткости подвески, и сумматор И. В качестве примера на чертеже показан фотоэлектрический датчик 6 положения якоря 4, состоящий из источника света (осветителя) 12 и фотоэлектрического преобразователя 13.
Устройство работает следующим образом. При протекании электрического тока по обмоткам 2 и 3 (либо по одной из них) в зазоре между сердечником 1 и якорем 4 возникает магнитный поток, создающий электромагнитную тяговую силу. Под действием данной электромагнитной силы и при наличии силы упругого сопротивления подвески 5 якорь 4 с определенным ускорением совершает прямолинейное перемещение (при сравнительно
якоря можно считать прямолинейной). Одновременно датчик 6 вырабатывает аналоговый сигнал, пропорциональный положению якоря 4. Сигнал от датчика 6 поступает в вычислительное устройство. После двухкратного дифференцирования в этом устройстве при помощи дифференцирующих усилителей 7 и 8 и умножения на коэффициент массы в блоке 9 параллельно с сигналом от того же самого датчика, умноженного на коэффициент упругости подвески в блоке 10, сигнал подается в сумматор 11. Последний в результате выдает сигнал, пропорциональный действующей на якорь электромагнитной тяговой силе. Так как в общем случае коэффициенты упругости и массы являются нелинейными функциями перемещения, времени и так далее, то блоки 9 10 установления коэффициентов передач являются нелинейными.
Предлагаемое устройство решает известное дифференциальное уравнение движения якоря под действием тяговой силы
т- +cx-p(f), dt
где т - коэффициент массы якоря; X - координата положения якоря; с - коэффициент упругости подвески; / - время;
P{t)-электромагнитная тяговая сила, как функция времени.
Первый член уравнения т - соответствует силе инерции якоря при его движении, а второй член сх - силе упругого сопротивления подвески.
Предмет изобретения
Устройство для испытания электромагнитных механизмов, содержащее упругую подвеску с установленным в ней якорем электромагнита и датчик положения якоря, отличающееся тем, что, с целью расщирения функциональных возможностей и упрощения конструкции, использована вычислительная схема с входом от упомянутого датчика, состоящая из последовательно соединенных двух дифференцирующих усилителей и блока установления коэффициента передачи, пропорционального массе якоря, а также параллельно им включенного блока установления коэффициента передачи, пропорционального упругости подвески, и подключенных к общему сумматору, выдающему сигнал, пропорциональный действующей силе.