По основному авт. св. № 293151 известно устройство для уравновешивания мальтийских механизмов, содержащее жестко соединенный с мальтийским крестом многопозиционный кулачок, пневматический нагружатель и механизм качания пневматического нагружателя вокруг оси шарнира.
Изобретение позволяет устранить вредное влияние составляющих уравновешивающей силы на опорные подшипники и уменьшить контактное давление на профилированный элемент.
Это достигается благодаря тому, что предложенное устройство снабжено дополнительными пневмонагружателями, взаимодействующими с профилированным элементом и установленными на корпусе таким образом, что сумма проекций их уравновешивающих сил па любую из осей минимальна, а радиус-вектор эквидистанты кулачка выполнен исходя из предложенной формулы (см. ниже).
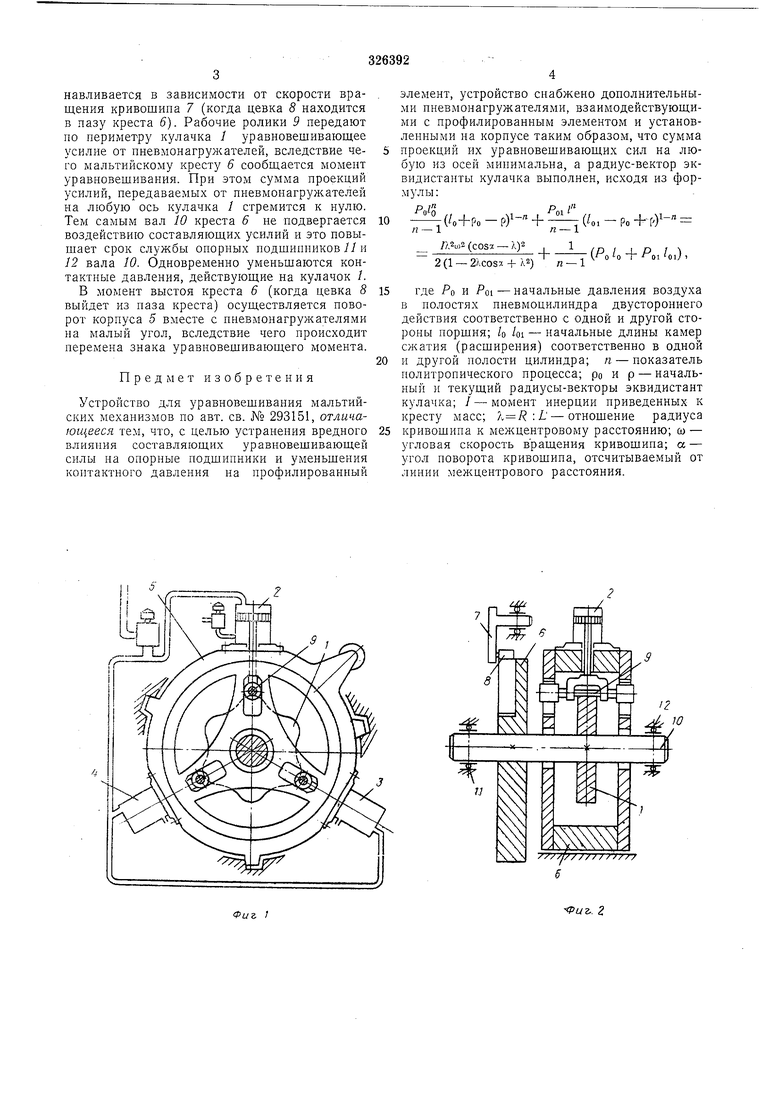
На фиг. 1 изображена схема описываемого устройства, вид спереди; на фиг. 2 - то же, продольный разрез; на фиг. 3 - кулачок устройства.
Описываемое устройство содержит кулачок / и несколько пневмонагружателей 2, 3 и 4, взаимодействующих с профилированным элементом кулачка 1 и установленных на корпусе 5 устройства таким образом, что сумма
проекций их уравновешивающих сил на любую из осей минимальна. Радиус-вектор эквидистанты кулачка (фиг. 3) выполнен, исходя из формулы:
п /п
Poi 0101
1-п
(/о
(/о,-Ро + Р)
И- 1 //Л|.г (cosa - /.)1 (Ро /о + /о, /оО , 2(1 - 2/XOSX + /.-)
Я-1
где РО и POI-начальные давления воздуха в полостях пневмоцилиндра двустороннего действия соответственно с одной и другой стороны порщня; /о и /01 - начальные длины камер
сжатия (расширения) соответственно в одной и другой полости цилиндра; п - показатель политропического процесса; ро и р - начальный и текущий радиусы-векторы эквидистант кулачка; / - инерции приведенных к
кресту масс; }. R:L - отнощение радиуса кривошипа к межцентровому расстоянию; ш - угловая скорость вращения кривошипа; а-- угол поворота кривошипа, отсчитываемый от линии межцентрового расстояния.
Кулачок 1 жестко соединен с мальтийским крестом 6.
Устройство работает следующим образом. В полости цилиндров пневмонагружателей 2, 3 и 4 подается определенное начальное давнавливается в зависимости от скорости вращения кривошипа 7 (когда цевка 8 находится в пазу креста 6). Рабочие ролики 9 передают по периметру кулачка 1 уравновешивающее усилие от пневмонагрулсателей, вследствие чего мальтийскому кресту 6 сообщается момент уравновешивания. При этом сумма проекций усилий, передаваемых от пневмонагрул ателей на любую ось кулачка / стремится к нулю. Тем самым вал 10 креста 6 не подвергается воздействию составляющих усилий и это повышает срок службы опорных подшипников 11 и 12 вала 10. Одновременно уменьшаются контактные давления, действующие на кулачок /. В момент выстоя креста 6 (когда цевка 8 выйдет из наза креста) осуществляется поворот корпуса 5 вместе с нневмонагрул ателями на малый угол, вследствие чего происходит перемена знака уравновешивающего момента.
Предмет изобретения
Устройство для уравновешивания мальтийских механизмов по авт. св. № 293151, отличающееся тем, что, с целью устранения вредного влияния составляющих уравновешивающей силы на опорные подшипники и уменьшения контактного давления на профилированный
элемент, устройство снабжено дополнительными нневмонагружателями, взаимодействующими с профнлированным элементом и установленными на корпусе таким образом, что сумма проекций их уравновешивающих сил на любую из осей минимальна, а радиус-вектор экБидистанты кулачка выполнен, исходя из формулы:
-р)- + (о.-Ро+Р)-
ft+b п - 1
//. (cOSa - + -(PJ. + P.Jo.)2)n -1
2(1 -2XCOS7- + л,
где Рй и POI - начальные давления воздуха в полостях пневмоцилиндра двустороннего действия соответственно с одной и другой стороны поршня; /о /01 - начальные длины камер (расширения) соответственно в одной и другой полости цилиндра; п-показатель политропического процесса; ро и р - начальный и текущий радиусы-векторы эквидистант кулачка; /--момент инерции приведенных к кресту масс; . I -отношение радиуса кривошипа к мелщентровому расстоянию; со - угловая скорость вращения кривошипа; а - угол поворота кривошипа, отсчитываемый от линии межцентрового расстояния.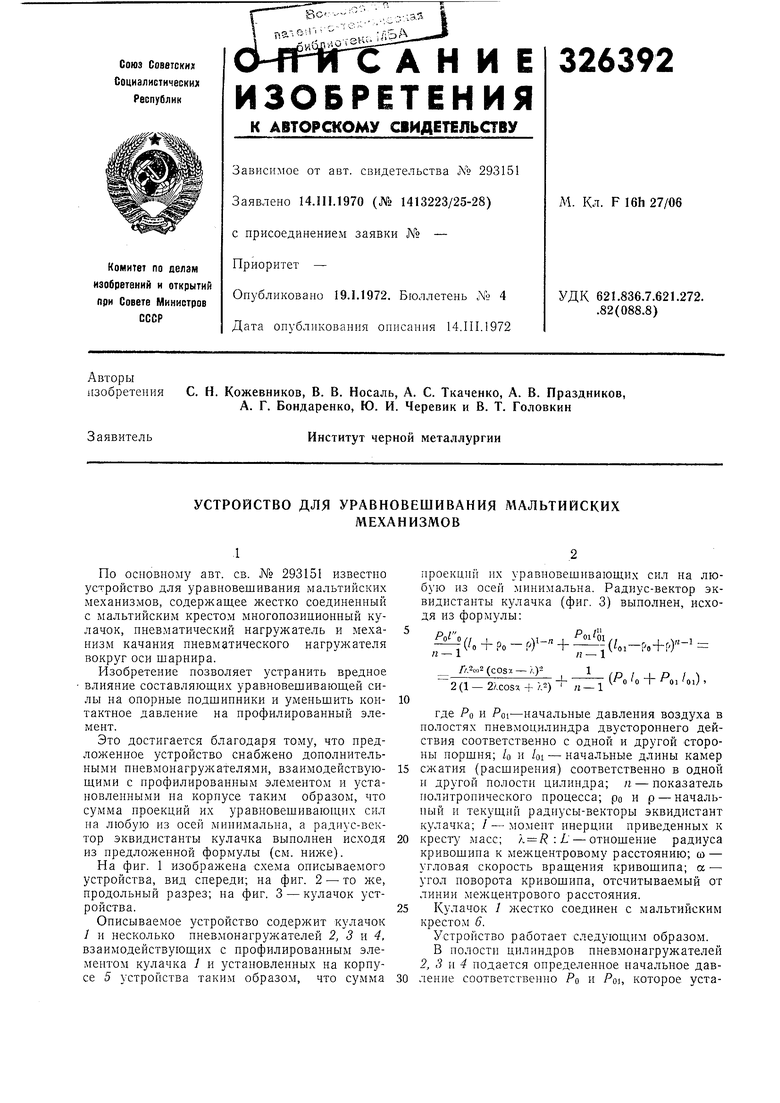
| название | год | авторы | номер документа |
|---|---|---|---|
| Уравновешивающее устройство мальтийского механизма | 1986 |
|
SU1362887A1 |
| Уравновешивающее устройство мальтийского механизма | 1986 |
|
SU1442766A1 |
| УСТРОЙСТВО для УРАВНОВЕШИВАНИЯ МАЛЬТИЙСКИХ МЕХАНИЗМОВ | 1972 |
|
SU354914A1 |
| УРАВНОВЕШИВАНИЯ МЕХАНИЗМОВ | 1971 |
|
SU293151A1 |
| МАЛЬТИЙСКИЙ МЕХАНИЗМ ПОДАЮЩЕ-ПОВОРОТНОГО УСТРОЙСТВА РОЛИКОВОГО СТАНА ХОЛОДНОЙ ПРОКАТКИТРУБ | 1972 |
|
SU335025A1 |
| Устройство для уравновешивания маль-ТийСКиХ МЕХАНизМОВ | 1979 |
|
SU823711A2 |
| Устройство для обработки кулачков | 1979 |
|
SU795753A1 |
| ДЕЛИТЕЛЬНОЕ УСТРОЙСТВО | 1971 |
|
SU294416A1 |
| Устройство для обработки кулачков | 1979 |
|
SU865556A1 |
| МАЛЬТИЙСКИЙ МЕХАНИЗМ | 1992 |
|
RU2023919C1 |

Фиг
-Фиг.. 2
