Известны вертикальные конвейеры для штучных грузов с нромежуточной загрузкой, содержащие многоценной тяговый орган, на котором закреплены гибкие грузонесущие элеменгы в виде свободно провисающих полотен, принимающих на рабочей ветви форму подвесной люльки. Однако в указанных конвейерах грузы при загрузке надают на полотна с большой высоты, что приводит к ударам н повреждению груза.
Цель изобретения - обеснечение безударной укладки грузов. Это достигается тем, что загрузочные станции оборудованы механизмом, образующим на полотне в период загрузки горизонтальный участок и выполненным в виде подвижной каретки с опорным роликом, выдвигаемым к передней кромке нолотна, и двух поворотных роликов, ноддерживающих заднюю кромку нолотна, обкатывающего указанные ролики.
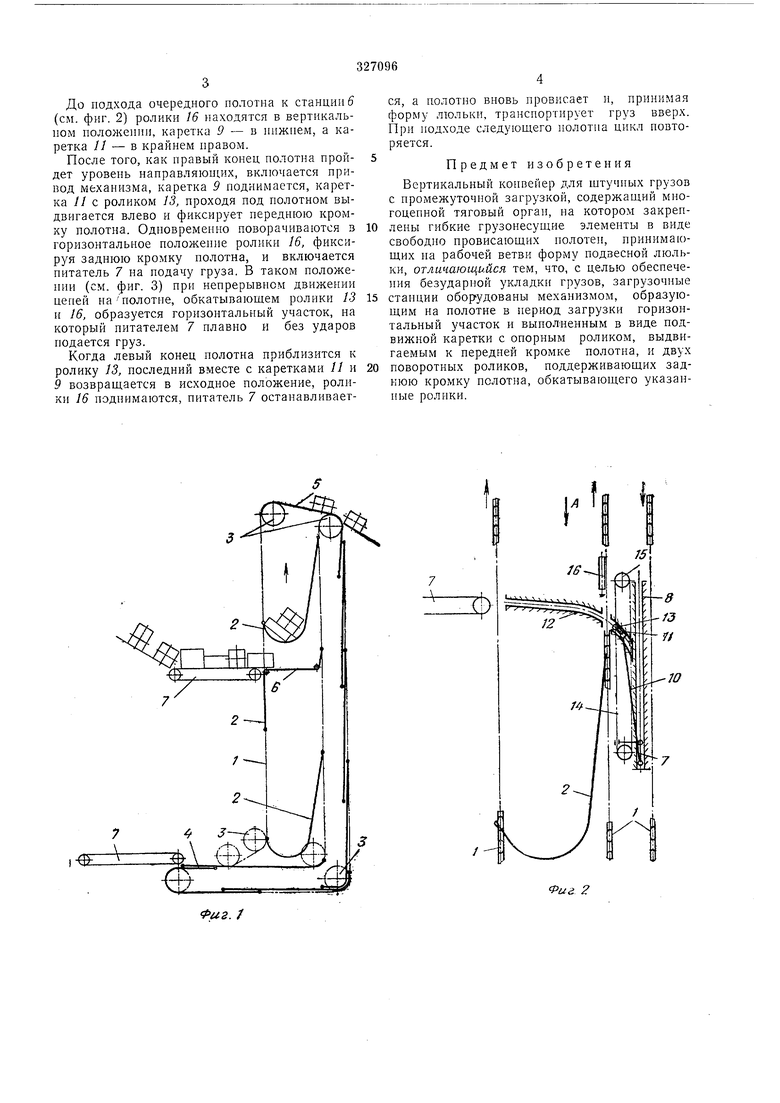
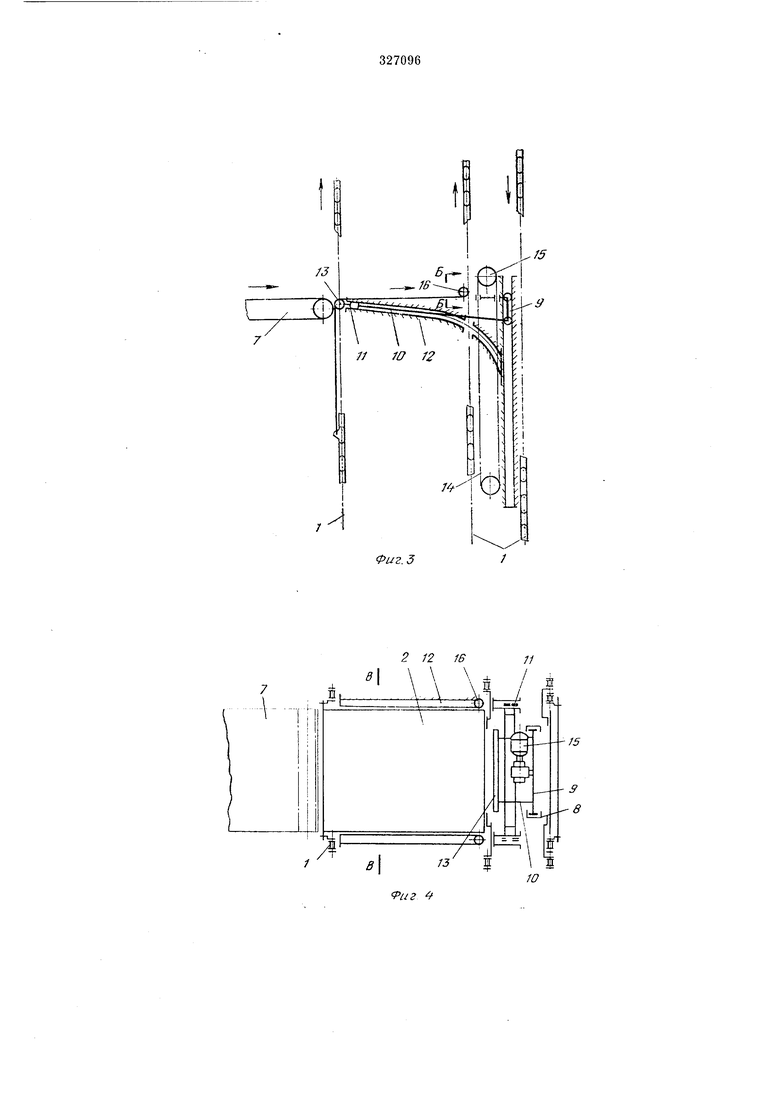
На фиг. 1 изображен нредлагаемый конвейер, общий вид, на фиг. 2 и 3 - участок конвейера у нромежуточной загрузочной станции при двух положепиях грузонесущего полотна, ira фиг. 4 - вид но стрелке /1 на фиг. 2, на фиг. 5 - сечения но Б-Б и В-В.
отводных и нриводных звездочках 3 так, что на рабочей ветвн они попарно расходятся, вследсгвие чего полотна провисают и принимают форму подвесной люльки. На нижней 4 и верхней 5 разгрузочных станциях, а также обратной ветви цепи / сближаются, а полотна 2 вытягиваются вдоль ипх I. Около станцпн 4 и промежуточных загрузочных станций 5 находятся питатели 7 для нодачи грузов на полотна.
В зоне каждой станции 6 в вертикальных направляющих 5 имеется каретка 9, связанная шатуном 10 с кареткой 11, установленной в криволинейных нанравляющнх 12. На каретке 11 закреплен ролик 13 длиной, нри.мерно равно щирине нолотна 2. Вертикальные перемещения каретки 9 но направляющим 8 осуществляются цепным механизмом 14 с приводом 15.
Сбоку от полотен на горизонтальных осях установлены два новоротных рол1и а 16 длиной, меньшей ноловнны щирины полотна.
Станция 6 оборудована устройствами (на чертеже не показаны) для автоматнческого включення, выключения и фиксации механизмов управления кареткой 9 и роликов 16 при подходе очередного полотна к станции 6 и отходе его от нее.
До подхода очередного полотна к станции б (см. фиг. 2) ролики 16 находятся в вертикальном положепии, каретка 9 - в нижнем, а каретка 11 - в крайнем нравом.
После того, как правый конец полотна нройдет уровень направляющих, включается привод механизма, каретка 9 ноднимается, каретка 11 с роликом 13, проходя под полотном выдвигается влево и фиксирует переднюю кромку полотна. Одновременно поворачиваются в горизонтальное положепие ролики 16, фиксируя заднюю кромку полотна, и включается питатель 7 на подачу груза, В таком положении (см. фиг. 3) при непрерывном движении цеией на полотне, обкатывающем ролики 13 и 16, образуется горизонтальный участок, на который питателем 7 плавно и без ударов подается груз.
Когда левый конец полотна приблизится к ролику 13, последний вместе с каретками 11 и 9 возвращается в исходное положение, ролики 16 поднимаются, питатель 7 останавливается, а полотно вновь провисает и, принимая форму люльки, транспортирует груз вверх. При подходе следующего полотна цикл повторяется.
Предмет изобретения
Вертикальный конвейер для щтучных грузов с промежуточной загрузкой, содержащий многоцепной тяговый орган, на котором закреплены гибкие грузонесущие элементы в виде свободно провисающих нолотен, принимающих на рабочей ветви форму подвесной люльки, отличающийся тем, что, с целью обеспечения безударной укладки грузов, загрузочные
станции оборудованы механизмом, образующим на полотне в период загрузки горизонтальный участок и выполненным в виде подвижной каретки с опорным роликом, выдвигаемым к передней кромке полотна, и двух
поворотных роликов, поддерживающих заднюю кромку полотна, обкатывающего указанные ролики.
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для автоматической перегрузки керамических изделий | 1981 |
|
SU988565A1 |
| КОЛЬЦЕВОЙ КОНВЕЙЕР | 2003 |
|
RU2255031C1 |
| УСТАНОВКА ДЛЯ УСАДКИ РПЗИНОВЫХ ПЛАСТИН | 1967 |
|
SU196296A1 |
| ЛЕНТОЧНЫЙ ПОДЪЕМНИК ДЛЯ СЫПУЧИХ ГРУЗОВ | 1991 |
|
RU2028974C1 |
| УСТРОЙСТВО для ПЕРЕМЕЩЕНИЯ ШТУЧНЫХ ГРУЗОВ | 1967 |
|
SU193996A1 |
| СПОСОБ ОБРАБОТКИ СЫПУЧИХ ГРУЗОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2203207C2 |
| УСТРОЙСТВО для ПЕРЕМЕЩЕНИЯ ШТУЧНЫХ ГРУЗОВ " | 1969 |
|
SU250022A1 |
| ВЗССО'гОЗНАЯ | 1973 |
|
SU368153A1 |
| Вертикальный цепной конвейер | 1976 |
|
SU606768A1 |
| НАКОПИТЕЛЬ-ПОДЪЕМНИК | 1973 |
|
SU397435A1 |

ID
г 2
/3 I
10
Риг 4
