1
Изобретение относится к промышленному транспорту.
Известны вертикальные цепные конвейеры, содержащие раму, приводные и натяжные звездочки, а также замкнутые тяговые цепи с прикрепленными к ним грузонесушими площадками l.
Наиболее к близким к изобретению по технической сущности и достигаемому результату являются вертикальные цепные кон- вейеры, включающие раму, установленные на раме приводные и отклоняющие звездочки, огибающие звездочки для пары бесконечнозамкнутых внутренних и внещних Цепей, контур последних из которых частично перекрывает контур, образованный другими цепями, грузонесущие площадки с роликами, связанные с внутрейними и внешними цепями посредством стержней, расположенных в плоскостях перемещения цепей, и направляющие, поддерживающие площадки при переходе с одной ветви конвейера на другую 2.
Иавестнь1е конвейеры не обеспечивают транспортирования грузов по замкнутому , контуру.
Цель изобретения - обеспечение транспортирования грузов по всему контуру кон.вейера.
Для этого стержни предлагаемого конвейера, расположенные со стороны к 1ждой площадки, обращенные к внещним цепям, подпружиненны в сторону внешних цепей и снабжены каждый приводом для их осевого перемещения, выполненным в виде установпенной на площадке в подшипниках шестерни в виде гайки, навинченной на резьбовой участок стержня, и зубчатых секторов, рас положенных в местах перехода площадок с одной ветви конвейера на другую, причем на внещних цепях напротив упомянутых стержней закреплены гнезда для концов стержней
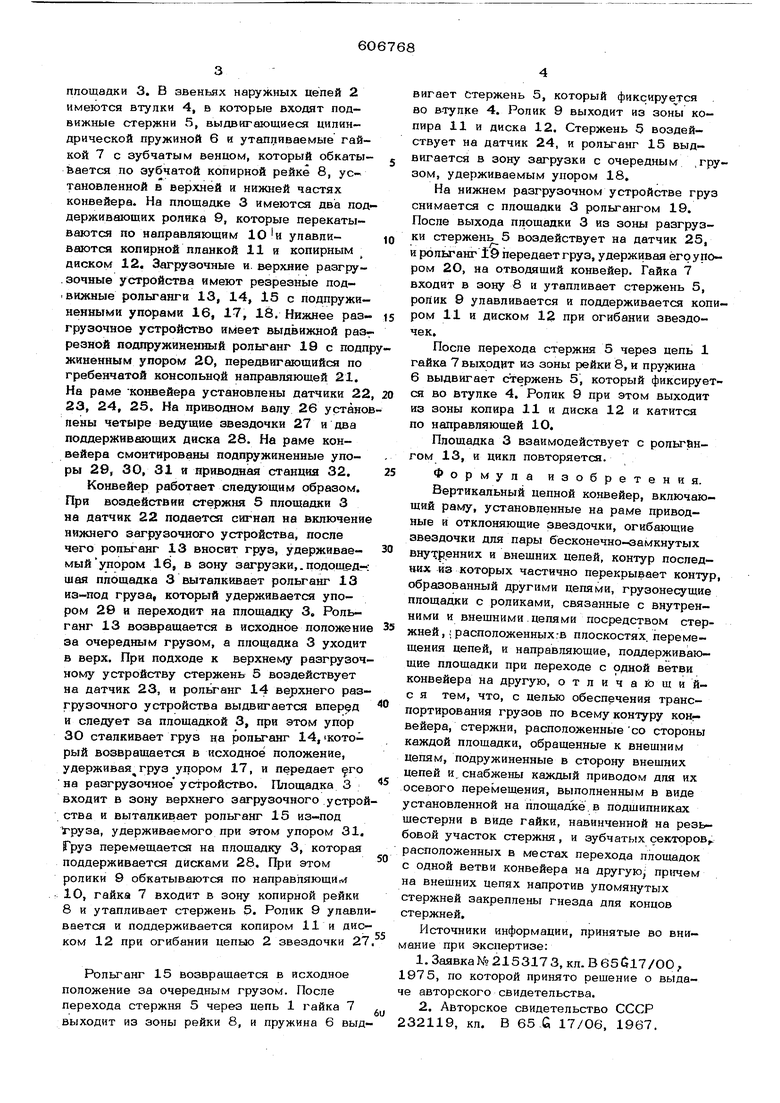
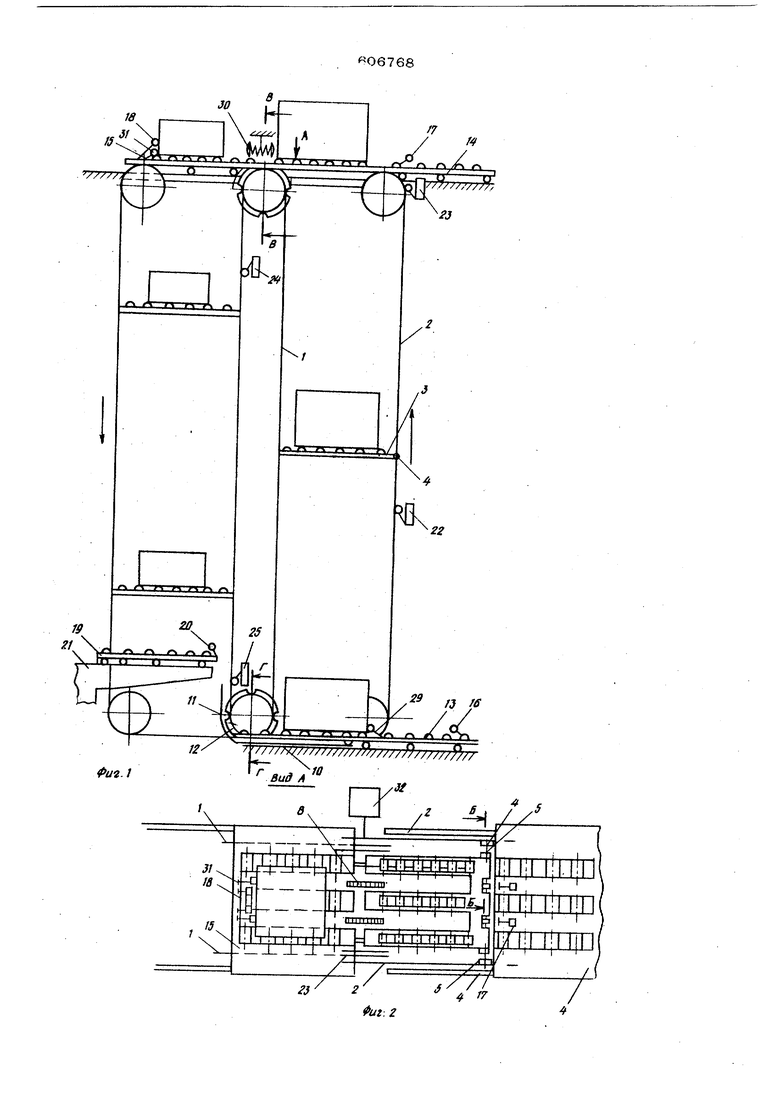
1Нафиг. 1 изображено описываемое у строй-. ство1нафиг.2-видАнафиг. 1;нафиг. 3разрез Б-Б фиг. 2; на фиг. 4 - разрез В-В фиг. 1; на фиг. 5 - разрез Г-Г фиг. 1; на фиг. 6 - разрез Д-Д фиг. 4; на фиг. 7 разрез Е-Е фиг. 5.
Конвейер содержит четыре тяговые цепи две внутренние цепи 1 и две наружные цепи 2, к которым прикреплены грузонесущие площадки 3. В звеньях наружных цепей 2 имеются втулки 4, в которые входят подвижные стержни 5, выдвигающиеся цилиндрической пружиной 6 и утапливаемые гайкой 7 с зубчатым венцом, который обкатыбается по зубчатой копиркой рейке 8, установленной в верхней и нижней частях конвейера. На площадке 3 имеются два под держивающих ролика 9, которые перекатываются по направляющим 10 и упавливаются копирной планкой 11 и копирным диском 12. Загрузочные и. верхние разгру. зочные устройства имеют резрезные под вижные рольганги 13, 14, 15 с подпружиненными упорами 16, 17, 18, Нижнее разгрузочное устройство имеет выдвижной раз резной подпружиненный рольганг 19 с подп жиненным упором 2О, передвигающийся по гребенчатой консопьной направляющей 21. На раме конвейера установлены датчики 22 23, 24, 25. На приводном валу 26 устано лены четыре ведущие звездочки 27 и два поддерживающих диска 28. На раме конвейера смонтированы подпружиненные упоры 29, 30, 31 и приводная станция 32. Конвейер работает следующим образом. При воздействии стержня 5 площадки 3 на датчик 22 подается сигнал на включени нижнего загрузочного устройства, после чего рольганг 13 вносит груз, удерживаемыйупором 16, в зону загрузки,. подош дшая площадка 3 выталкивает рольганг 13 из-под груза, который удерживается упором 29 и переходит на площадку 3. Рольганг 13 возвращается в исходное положени за очередным грузом, а площадка 3 уходит в верх. При подходе к верхнему разгрузоч ному устройству стержень 5 воздействует на датчик 23, и рольганг 14 верхнего раз грузочного устройства выдвигается вперед и следует за площадкой 3, при этом упор ЗО сталкивает груз на рольганг 14, «который возвращается в исходное положение, удерживая груз упором 17, и передает го на разгрузочноеустройство. Площадка 3 входит в зону верхнего загрузочного устро ства и выталкивает рольганг 15 из-под Vpy3a, удерживаемого при этом упором 31, Груз перемещается на площадку 3, которая поддерживается дисками 28. При этом ролики 9 обкатываются по направляющим : 10, гайка 7 входит в зону копирной рейки 8 и утапливает стержень 5. Ролик 9 улавл вается и поддерживается копиром 11 и дис ком 12 при огибании цепью 2 звездочки 2 Рольганг 15 возвращается в исходное положение за очередным грузом. После перехода стержня 5 через пепь 1 гайка 7 выходит из зоны рейки 8, и пружина 6 выд вигает стержень 5, который фиксируе тся . во втулке 4. Ролик 9 выходит из зоны копира 11 и диска 12, Стержень 5 воздействует на датчик 24, и рольганг 15 выдвигается в зону загрузки с очередным ,грузом, удерживаемым упором 18. На нижнем разгрузочном устройстве груз снимается с площадки 3 рольгангом 19. После выхода площадки 3 из зоны разгрузки стержень 5 воздействует на датчик 25, и рольганг 19 передает груз, удерживая его упором 20, на отводящий конвейер. Гайка 7 входит в зону 8 и утапливает стержень 5, ролик 9 улавливается и поддерживается копиром 11 и диском 12 при огибании звездочек. После перехода стержня 5 через цепь 1 гайка 7 выходит из зоны рейки 8, и пружина 6 выдвигает стержень 5, который фиксируется во втулке 4. Ролик 9 при этом выходит из зоны копира 11 и диска 12 и катится по направляющей 10. Площадка 3 взаимодействует с рольгйнгом 13, и цикл повторяется. Формула изобретения. Вертикальный цепной конвейер, включающий раму, установленные на раме приводные и отклоняющие звездочки, огибающие звездочки для пары бесконечно-замкнутых внутренних и внещних цепей, контур последних из которых частично перекрывает контур, образованный другими цепями, грузонесущие площадки с роликами, связанные с внутренними и внещними.цепями посредством стержней, ,; расположенных.-в плоскостях, перемещения цепей, и направляющие, поддерживающие площадки при переходе с одной ветви конвейера на другую, отличайщийс я тем, что, с целью обеспечения транспортирования грузов по всему контуру конвейера, стержни, расположенныесо стороны каждой площадки, обращенные к внещним цепям, подружиненные в сторону внещних цепей и. снабжены каждый приводом для их осевого перемещения, выполненным в виде установленной на площадке, в подшипниках шестерни в виде гайки, навинченной на резьбовой участок стержня , и зубчатых секторов,: расположенных в местах перехода площадок с одной ветви конвейера на другую, причем на внешних цепях напротив упомянутых стержней закреппены гнезда для концов стержней. Источники информации, принятые во вниание при экспертизе: 1.3аявка№2153173, кл. В65017/ОО, 975, по которой принято решение о выдае авторского свидетельства, 2. Авторское свидетельство СССР 32119, кл. В 65 G 17/06, 1967.
2}
30
| название | год | авторы | номер документа |
|---|---|---|---|
| Вертикальный конвейер для штучных грузов | 1985 |
|
SU1244046A1 |
| Вертикальный цепной конвейер | 1986 |
|
SU1348263A1 |
| Вертикальный цепной конвейер для транспортирования штучных грузов | 1982 |
|
SU1071537A1 |
| Вертикальная конвейерная система | 1990 |
|
SU1738743A1 |
| Перегрузочное устройство стеллажного склада | 1982 |
|
SU1068352A1 |
| Устройство для передачи груза с подвесного конвейера на рольганг | 1984 |
|
SU1217751A1 |
| Роликовый конвейер | 1983 |
|
SU1126515A1 |
| Вертикальный четырехцепной конвейер для штучных грузов | 1984 |
|
SU1207916A1 |
| Вертикальный конвейер | 1975 |
|
SU569490A1 |
| Транспортное средство | 1990 |
|
SU1735163A1 |
г- г
.4
