Изобретение относится к области автоматизации сельскохозяйственного производства.
Известные системы автоматического регулирования содержат устройства внешней отрицательной обратной связи (чувствительные, усилительные и исполнительные элементы), охватывающие объект по всем основным регулируемым координатам и имеющие в каждой локальной подсистеме устройства внутренней стабилизирующей обратной связи, обеспечивающие устойчивость всей системы.
В предложенной системе с целью достижения ее автономности и инвариантности в каждой из локальных подсистем имеются дополнительные информационные по возмущающим и управляющим воздействиям цепочки, подключаемые параллельно с основными управляющими каналами ко входам несобственных устройств Внутренней стабилизирующей обратной связи.
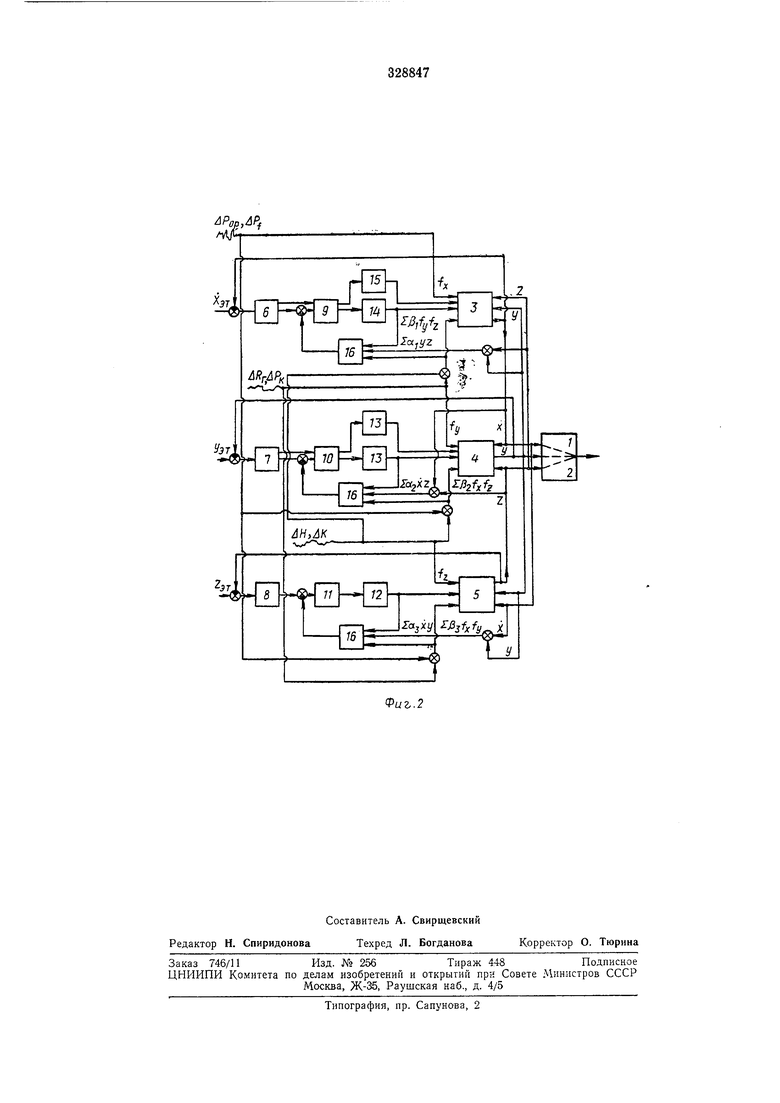
На фиг. 1 приведена принципиальная схема предлагаемой системы комплексного автоматического регулирования тракторного агрегата; на фиг. 2 - то же, функциональная схема.
Система содержит многосвязной объект комплексного регулирования - тракторный агрегат, составленный из трактора 1 и плуга 2, и комплексный регулятор 3, составленный лз трех объединенных локальных регуляторов, осуществляющих управление объектом в
поступательном (координата л;), в горизонтальной 4 и продольно-вертикальной 5 ПЛОСКОСТИ (координаты г/ и г).
Каждый локальный регулятор содержит чувствительные устройства 6-8, усилительно-преобразовательные элементы 9-11 и исполнительные органы 12-15. Все три локальных регулятора замыкаются на блоки 16 логики, состоящие из устройств внутренней стабилизирующей обратной связи, осуществляющих, с учетом подаваемых на них несобственных воздействий, стабилизацию, коррекцию и развязывание подсистем.
В систему Питания входят масляный насос 17, сливной бак 5 и электрический генератор 19. i На фиг. 2:
РОР - изменение тягового сопротивления,
ДРо/ - изменение сопротивления на перекатывание трактора, -колебания горизонтальной составляющей реакции плуга, ДРк - разность касательных усилий на
движителях трактора, ДЯ - изменение макро- и микрорельефа,
X, у, 2-основные регулируемые величины скорость (загрузка), и глубина,
Хэт, Уэт 2эт -эталонные регулируемые величины,
а, р - коэффициенты связи. При отклонении под действием .возмущений какой-либо из регулируемых координат от эталонного (заданного) значения Хат, г/эт, или 2эт чувствительные устройства 6-8 (в силу многосвязностн объекта по возмундениям) реагируют в той или иной стенени на это отклонение и посылают об этом сигналы в усилительно-преобразовательные элементы 9-11 и соответственно в устройства блока 16 логики. Одновременно на входы устройств внутренних стабилизирующих обратных связей подаются суммы воздействий от несобственных регулируемых величин
.,yz; y.,xz; .ху
и суммы несобственных возмущающих воздействий
SPifyf.; SP.y.; 2РзУ.
в результате сравнения которых с собственными возмущающими воздействиями и значением собственной регулируемой величины вырабатываются сигналы, идущие избирательно в определенные иополнительные органы 12, 13, 14 или 15. Причем интенсивность управляющих воздействий (амплитуды и длительность) оказываются дозированными. В результате этого достигается устойчивость системы и требуемое качество.
Предмет изобретения
Система комплексного автоматического регулирования тракторного агрегата, содержащая устройства внещней отрицательной обратной связи (чувствительные, усилительные
и исполнительные элементы), охватывающие объект по всем основным регулируемым координатам, и имеющие в каждой локальной подсистеме устройства внутренней стабилизирующей обратной связи, обеспечивающие устойчивость всей системы, отличающаяся тем, что, с целью достижения автономности и инвариантности системы, в каждой из ее локальных подсистем имеются дополнительные информационные по возмущающим и управляющим
воздействиям цепочки, подключаемые параллельно с основными управляющими каналами ко входам несобственных устройств внутренней стабилизирующей обратной связи.

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ АСТАТИЧЕСКИХ СИСТЕМ УПРАВЛЕНИЯ ОБЪЕКТАМИ С НЕОПРЕДЕЛЕННЫМИ ПАРАМЕТРАМИ НА ОСНОВЕ ВСТРОЕННЫХ МОДЕЛЕЙ И МОДАЛЬНОЙ ИНВАРИАНТНОСТИ | 2014 |
|
RU2570127C1 |
| Устройство для поворота трак-ТОРНыХ АгРЕгАТОВ | 1979 |
|
SU808024A1 |
| СПОСОБ ЛОГИЧЕСКОГО УПРАВЛЕНИЯ СЛОЖНЫМ МНОГОСВЯЗНЫМ ДИНАМИЧЕСКИМ ОБЪЕКТОМ | 2014 |
|
RU2574841C1 |
| СПОСОБ АДАПТИВНОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ГАРМОНИЧЕСКИМ МОМЕНТОМ НАГРУЗКИ В ШИРОКОМ ДИАПАЗОНЕ СКОРОСТЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2761780C1 |
| Устройство для автоматического поворота тракторного агрегата | 1977 |
|
SU727169A1 |
| СПОСОБ ПОСТРОЕНИЯ ЦИФРОВОЙ ИСПОЛНИТЕЛЬНОЙ ИНЖЕНЕРНО-РАДИАЦИОННОЙ МОДЕЛИ ОСТАНОВЛЕННОГО ДЛЯ ВЫВОДА ИЗ ЭКСПЛУАТАЦИИ ОБЪЕКТА ИСПОЛЬЗОВАНИЯ АТОМНОЙ ЭНЕРГИИ ПРИ ВЫПОЛНЕНИИ КОМПЛЕКСНОГО ИНЖЕНЕРНОГО И РАДИАЦИОННОГО ОБСЛЕДОВАНИЯ УКАЗАННОГО ОБЪЕКТА И СИСТЕМА ДЛЯ РЕАЛИЗАЦИИ УКАЗАННОГО СПОСОБА | 2022 |
|
RU2815600C1 |
| КОМПЛЕКСНАЯ СИСТЕМА МОНИТОРИНГА, КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНИЧЕСКИМИ СИСТЕМАМИ ЖИЗНЕОБЕСПЕЧЕНИЯ И БЕЗОПАСНОСТИ АВТОНОМНЫХ ОБЪЕКТОВ | 2022 |
|
RU2782240C1 |
| Устройство для автоматического вождения самоходного агрегата | 1988 |
|
SU1605953A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ОТВАЛОМ БУЛЬДОЗЕРА | 1991 |
|
RU2078879C1 |
| Комплексная система мониторинга, контроля и управления техническими системами жизнеобеспечения и безопасности автономных объектов | 2020 |
|
RU2759757C1 |
12 9 ; 73 W
747; 15
19 8
Vui.f 18
ЛРор,ЛР
