Изобретение относится к химической промьшшенности и может быть использовано в установках для выращивания монокристаллов.
Целью изобретения является повышение плавности работы системы в установившемся режиме
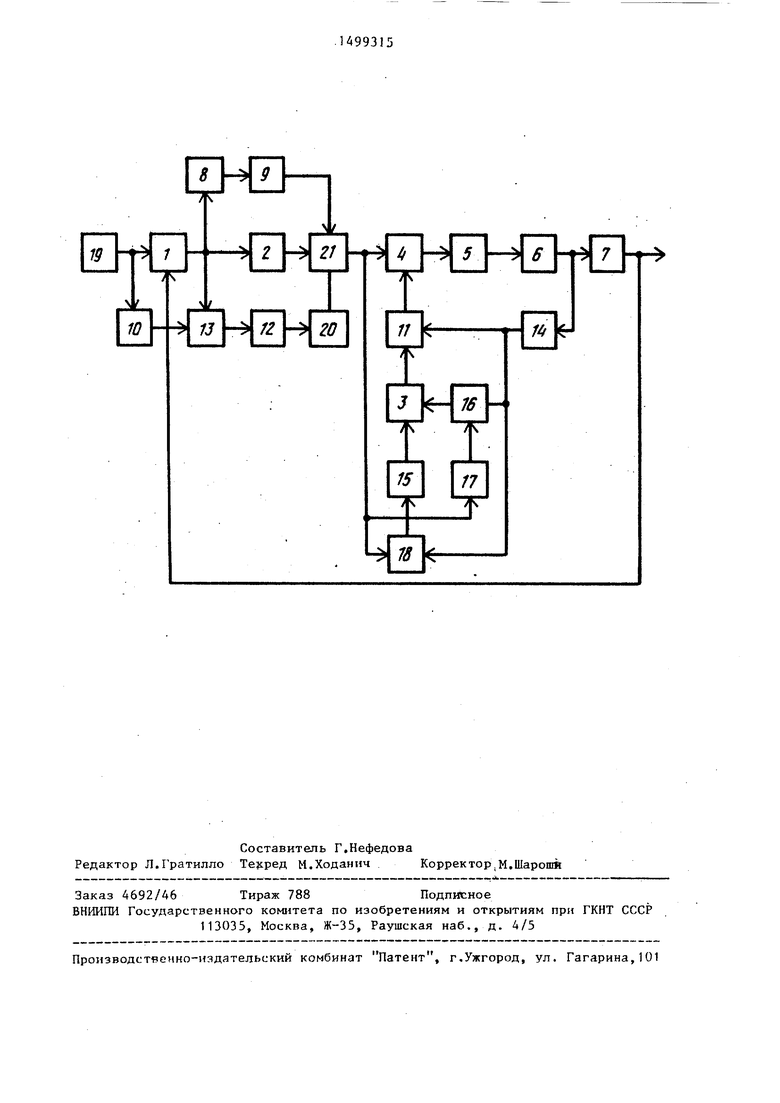
На чертеже представлена блок -схе-.. ма системы...
В блок-схему включены измеритель 1 рассогласования, первый усилитель 2, первый ключ 3, первый сумматор 4, усилитель 5 мощности, исполнительный двигатель 6, редуктор 7, дифференциатор 8, второй и третий усили- тели 9 и 10, второй сумматор 11, четвертый усилитель 12, третий сз М- матор 13, тахогенератор 14, первый релейный блок 15, первый умножитель 16, детектор 17,второй умножитель
18, задатчик 19, второй релейный блок 20, второй ключ 21.
В качестве детектора I7 может быть применен линейный двухтактный детектор, имеющий характеристику титт па Вьщеление модуля.
В качестве дифференциатора 8 применяется дифференцирующее звено второго порядка.
Система работает следующим образом.
Выходной сигнал Х; задатчика 19 подается на второй вход измерителя 1 рассогласования, на второй вход которого поступает выходной сигнал х редуктора 7, а на его выходе формируется сигнал рассогласования S. Х| -х.
Это сигнал cf подается на вход первого усилителя 2, на выходе которого формируется сигнал .- о, где
4::
СО СО
: ел
3,149
KIJ - коэффициент передачи усилителя 2.
Сигнал Хд подается на вход третьего усилителя 1Q, на его выходе фор- мируется сигнал U,(,x. Этот сигнал поступает на первый вход третьего сумматора 13, на второй выход которого подается сигнал рассогласования о , а на его выходе форми- руется сигнал U х, который подается, на вход четвертого уснпител 12, на выходе которого формируется
сигнал
Сигнал и,( поступает на вход вто рого релейного блока 20, на выходе кторого формируется сигнал вида
Що
(1, если Ui2 D; О,
если U(2$ О.
Сигнал поступает на управляю- щий вход второго ключа 21. Сигнал рассогласования а подается также на вход, дифференциатора 8, с
. выхода которого сигнал с 7Г по-
ступает на вход второго усилителя 9. . С выхода второго усилителя 9 сигнал подается на первый информационный вход второго ключа 21, на второй информационный вход которого поступает сигнал Ui с выхода первого усилителя 2,
В случае, когда , второй : ключ 21 замыкает. первый информационный вход на выход и на его выходе получаем сигнал ,
Если , второй ключ 21 замыкает второй информационный вход на выход и на его выходе имеем сигна Ugi .
Сигнал UK поступает на первый . вход первого сумматора 4, на второй вход которого поступает выходной си1- нал второго сумматор а 11 , а на его выходе формируется сигнал U Ua,-U, .
Сигнал и4 поступает на усилитель 5 мощности, на выходе которого формируется сигнал где Kg - коэффициент передачи усилителя мощности.
Сигнал Us поступает на вход исполнительного делителя 6, на выходе которого формируется сигнал ,U5 где Kf, - коэффициент передачи испол-
нительного двигателя 6-,
Сигнал Uft поступает на вход редуктора 7, на выходе которого.формиUH
руется сигнал ,, где К- - коэффициент передачи-редуктора 7, который поступает на первый вход измерителя 1 рассогласования, Кррме того, сигнал и поступает на вход тахоге- нератора 14, на выходе которого формируется Сигнал (,, где коэффициент передачи тахогенератогт. ра 14.
Сигнал и поступает на первый вход первого умножителя 16, на второ вход которого поступает выходной сигнал U/T. детектора 17, а на его выходе Формируется сигнал
U, -lUgil.
Кроме того, сигнал поступает на первый вход второго умножителя 18 на второй вход которого поступает сигнал U(2 , а на его выходе формируется сигнал , Ui2 .
Сигнал поступает на вход 21 первого релейного блока 15, на выходе которого формируется сигнал U/g вида
1, если и/ь О
и,5
.О, если 6 О.
Сигнал поступает на управляющий вход ключа 3, на информационный вход которого поступает сигнал U(j , а на его выходе формируется Сигнал U-j, вида
IUij,, если и, . U(b если Ui5 0.
Сигнал Ug поступает на второй вход второго сумматора 11, на первьй вход которого поступает сигнал U с выхода тахогенератора 14, а на выходе второго сумматора 11 формируется сигнал U{f .
Принцип коррекции данной системы заклюяаетсл в следующем. Сигнал V , подаваемый на второй вход измерителя 1 рассогласования, отслеживается исполнительным двигателем 6.
Сигнал управления формируется на выходе cjTMMaTopa 4, для чего на его первый вход подается сигнал . На второй вход С5гмматора 4 через вФр.рой сумматор 11 в цепи формирования корректирующего сигнала поступает сигнал, состоящий из двух составляющих: первой, пропорциональной скорости поворота вь1ходного вала, и второй, про
514
порциональный произведению u cr. Ux4 формируемому первым умножителем 16 в канале формирования величины нелиней ного сигнала коррекции.
За счет изменения коэффициента демпфирования улучшается качество переходного процесса, причем это изменение происходит в нечетных четвертях колебаний, а в четных четвертях колебаний демпфирование остается постоянным.
Кроме того, с целью повышения плавности работы системы в устано- вившемся режиме сигнал Ug в зависимости от сигнала управления вторым ключом 21 имеет вид
, если (5-K,iX)0;
и .
iKqe , если К ((5-К,зХ)0.
В переходном режиме при большой величине сигнала рассогласования S сигнал управления формируется в зависимости от величины сигнала рас- согласования и величины нелинейного сигнала коррекции
и, UM-US; Щ Urn -и,, ;
, если 1; и , если 0о
При з еньшении сигнала рассогласования о до величины (, где величина определяет область допустимых отклонений угла поворота выходного вала системы, второй ключ 21 размыкает цепь передачи сигнала и замыкает цепь передачи сигнала Кдб.
Этим самым достигается максимум плавности в установившемся режиме по
f
критерию де с учетом изменения коэффициента демпфирования в не-четных четвертях колебаний и постоян- ной величиной демпфирования в четных четвертях колебаний,
Таким образом, предлагаемая следящая система позволяет достичь высокой плавности движения в уста
0
93
g
g
0
5
0
g
п
35
0
156
новившеыся режиме, сохранив высокие быстродействия в переходных режимах,
ъ
Формула изобретений
Следящая система, содержащая последовательно соединенные первый сумматор, усилитель мощности и исполнительный двигатель, вал которого кинематически связан с валом тахогене- ратора и входным валом редуктора, -- подключенного выходным валом к первому входу измерителя рассогласования, вторым входом соединенного с выходом задатчика, а выходом - с входом первого усилителя, выход тахогенератора подключен к первым входам первого умножителя, второго сумматора и второ- .го умножителя, соединенного выходом с входом первого ..релейного блока, а вторым входом - с первым входом первого сумматора и входом детектора, подключенного выходом к второму входу первого умножителя, соединенного выходом с информационным входом первого ключа, подключенного управляющим входом к выходу первого релейного блока, а выходом - к второму входу второго сумматорза, соединенного выходом с вторым входом первого сумматора, о т л и ч а ю- щ а я с я тем, что, с целью повышения плавности работы системы в установившемся режиме, в нее дополнительно введены последовательно соединенные дифференциатор, второй усилитель и второй ключ и последовательно соединенные третий усилитель, третий сумматор, четвертый усилитель и второй релейный блок, подключеннный выходом к управляющему входу второго ключа, соединенного вторым информационным входом с выходом первого усилителя, а -выходом - с первым входом первого сумматора, выход измерителя рассогласования подключен к входу дифференциатора и к второму входу третьего сумматора, выход задатчика соединен с входом третьего усилителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1984 |
|
SU1216773A1 |
| Дфухканальная следящая система | 1980 |
|
SU954923A2 |
| Нелинейное корректирующее устройство | 1990 |
|
SU1755255A1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2015519C1 |
| Нелинейная следящая система | 1989 |
|
SU1615672A1 |
| Следящая система | 1977 |
|
SU661501A1 |
| Импульсный регулятор | 1984 |
|
SU1170426A1 |
| Комбинированная следящая система | 1982 |
|
SU1023276A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2143719C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2060530C1 |
Изобретение относится к химической промышленности и может быть использовано в установках для выращивания монокристаллов. Целью изобретения является повышение плавности работы системы в установившемся режиме. Цель достигается за счет того, что в ней пропорциональный и дифференциальный законы регулирования переключаются в зависимости от знака линейной комбинации сигналов задания и рассогласования, и коэффициент передачи скоростной обратной связи зависит от модуля сигнала управления и от знака произведения сигналов управления и скоростной обратной связи. 1 ил.
| Следящая система | 1984 |
|
SU1216773A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Нелинейные корректирующие устройства в системах автоматического управления | |||
| /Под ред | |||
| Ю.И.Топчеева„ М.: Машиностроение, 1971, с | |||
| Шкив для канатной передачи | 1920 |
|
SU109A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
