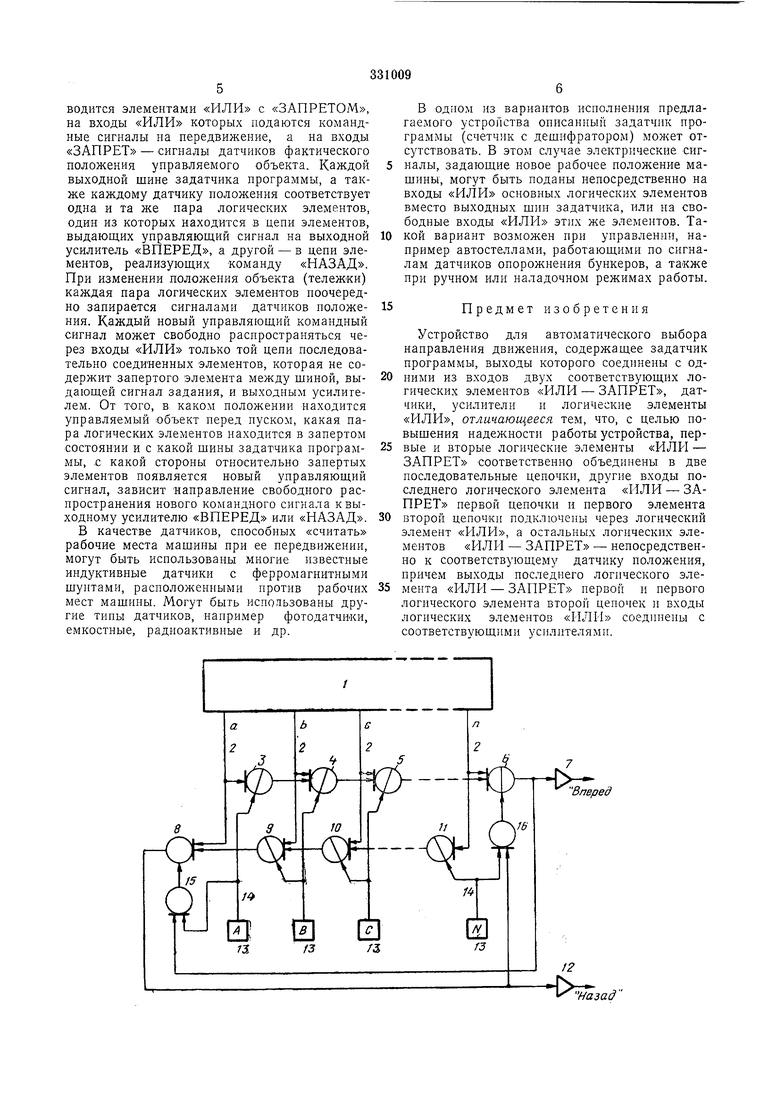
Р зобретение относится к области применения электротехнических средств автоматического управления в промышленных машинах, агрегатах или механизмах, которые оборудуют реверсивными электроприводами для изменения рабочих положений отдельных механизмов машины или машины в . Известное устройство для автоматического управления сбрасываюш,ими тележками, содержаш;ее два синхронно движуш.ихся шаговых искателя и релейную аппаратуру, при ПОМОШ.И которых осупцествляется запоминанне места остановки и выбор иаправления движения тележки после нажатия диспетчером ключа, задаюш;его новое место работы тележки, сложно и недостаточно надежно. В предлагаемом устройстве, с целью повышения надежности его работы, первые и вторые элементы «ИЛИ - ЗАПРЕТ соответственно объединены в две иоследовательные цепочки, другие входы последнего логического элемента «ИЛИ - ЗАПРЕТ первой цепочки и первого элемента второй цепочки подключены через элемент «ИЛР1, а остальных элементов «ИЛР1 - ЗАПРЕТ - непосредственно к соответствующему датчику положения, причем выходы последнего логического элемента «ИЛИ - ЗАПРЕТ первой и первого логического элемента «ИЛИ - ЗАПРЕТ второй цепочек и входы схем «ИЛИ соединены с соответствующими усилителями. Па чертеже иредставлена схема предлагаемого устройства. На схеме приняты следующие обозначения: задатчик / программы работы машины (например, двоичный счетчик с дешифратором); выходные машины 2 задатчика программы, по которым передаются комапдные спгпалы па изменения положений машины (строчными буквами обозначены задаваемые положения машины, которые изменяются ватедствие переключений счетчика по программе, определяемой внутренними соедииепнями в дешифраторе); логические элементы 3-6 «ПЛИ - ЗАПРЕТ, управляющие выходным усилителем, реализующим команду «ВПЕРЕД ; выходной усилитель 7, включающий и непрерывно питающий электроэнергией исполнительный механизм при перемещении машины в направлении «ВПЕРЕД ; лог}1ческ е элементы 8-11 «ИЛИ - ЗАПРЕТ, управляющие выходным уснлителем «ПАЗАД ; выходной усилитель 12 «НАЗАД ; датчики 13А... 13N положений машины (нрописнымн буквами обозначены отдельные рабочие положения мащииы, регистрируемые датчиками положения или с«1едящим устройством); выходные линии 14 датчиков положения мащины; дополнительные элементы 15 и 16 «ПЛП на
два входа, применяемые для взаимной блокировки выходных цепей устройства при передвижении машины «ВПЕРЕД или «НАЗАД.
Устройство работает следующим образом.
Когда тележка находится в исходном положении на первой рабочей позиции, где осуществляется загрузка телел ки с автоолератором изделиями, подлежаш,ими цинкованию, датчик первого положения 13А выдает сигнал, который логические элементы 3 и 8 в запертом состоянии. По окончании загрузки тележки в задатчик программы вводится пусковой нрямоугольный или продиффереицированный импульсный электрический сигнал, который производит переключение счетчика задатчика программы.
В результате переключения счетчика задатчнка программы на выходной шине 2Ь задатчика появляется выходное напряжение, которое воздействует на входы «ИДИ элементов 4 и 9. Это напряжение представляет собой задающий командный сигнал на перемещение тележки ко второму рабочему месту, в данном примере к ванне, оборудованной датчиком положепия 13В.
Задающий сигнал, появившийся с шины 2Ь задатчика иа входе «ИДИ элемента 4, распространяется по цепи логических элементов 5-6 и воздействует на выходной усилитель 7, реализующий команду «ВПЕРЕД. Выходной усилитель включает электродвигатель «ВПЕРЕД, и тележка начинает передвигаться на вторую заданную рабочую позицию, оборудованную датчиком положения 13В.
Включение выходного усилителя 7 происходит благодаря тому, что тележка перед пуском электродвигателя стоит на первой позиции и в запертом состоянии иаходятся только элементы 5 и 8, которые не запрещают распространение командного сигнала с шины 2Ь дешифратора к выходному усилителю 7. Распространение сигнала с шины 2Ь в сторону выходного усилителя 12 (команда «НАЗАД) исключается, так как элемент 8 находится в запертом состоянии сигналом датчика первого положения ISA.
Для того, чтобы полностью исключить возможность включения выходного усилителя 12 в период перемещения тележки между датчиками 13А и 13В (после схода тележки с датчика первого положения А, когда «Запрет с элемента 8 снимается), должна быть применена блокировка выходного элемента 8, управляющего выходным усилителем 12. Указанная блокировка осуществляется соединением выхода логического элемента 6 со входом «ЗАПРЕТ элемента 8 через элемент «ИЛИ на два входа 15, один из которых соединен с выходом датчика А, а другой вход «ИДИ - с выходом логического элемента 6. Аналогично соединяется выход элемента 8 со входом «ЗАПРЕТ элемента 6 через элемент «ИДИ 16, который необходим для обеспечения блокировки выходного элемента 6 (и выходного
усилителя 7) при выполнении команды «НАЗАД.
Во время приближения тележки ко второй рабочей позиции, заданной для остановки вьь ходным сигиалом с щииы 2Ь дешифратора, срабатывает датчик 13В, который своим выходным сигналом немедленно запирает логические элементы 4 и 9. При запирании логического элемента 4 выходной усилитель 7 теряет управляющее напряжение, вследствие чего от сети отключается электродвигатель и начинается процесс торможения. Торможение может быть произведено, например обычным электро.мехат1ическим тормозом, электромагнит которого отключается одновременно с электродвигателем.
После остановки тележки на второй рабочей позиции В (над ванной) автоматически включается устройство управления автооиератором, который отрабатывает подпрограмму на этой нознции и затем выдает импульсный сигнал на очередное переключение задатчика основной программы для выдачи команды на перемещение тележки к следующей рабочей позиции (ваине).
Если в результате переключения задатчика под напряжением окажется выходная щина 2с дешифратора, задающая перемеш,ение тележки на третью позицию С, контролируемую датчиком 13С, то через входы «ИДИ элементов 5 и 5 снова включается выходной усилитель 7, который включает электродвигатель тележки. В результате тележка с изделиями начинает перемещаться на третью рабочую позицию.
При приближении тележки к третьему рабочему иоложению С срабатывает датчик 13С, запирается элемент 5, теряет управляющий сигнал и запирается выходной усилитель 7, отключается электропривод и происходит торможение и остановка тележки на третьей позиции С.
Если после отработки иодпрограммы на третьей позиции С автооператор выдал сигнал иа переключение счетчика, в результате которого появилось напряжение на шине 2Ь дешифратора, характеризующее очередное задание на воз1фащение тележки на вторую позицию, осиащенную датчиком положения В. Так как элемент 5 находится в запертом состоянии выходным сигналом датчика третьего положения С, новый командный сигнал задания с шины 2Ь может свободно распространяться только через элементы 9 и 8 к выходному усилителю 12. При срабатывании этого усилителя включается электродвигатель «НАЗАД и обеспечивается передвижение тележки на вторую программную позицию, характеризуемую шиной задания b и датчиком ноложения В.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического выбора направления движения объекта | 1977 |
|
SU722828A1 |
| Устройство для автоматическогоВыбОРА НАпРАВлЕНия дВижЕНия ОъбЕКТА | 1979 |
|
SU812675A1 |
| Устройство для программного управления намоточным станком | 1990 |
|
SU1784942A1 |
| Устройство для программного упРАВлЕНия ТРАНСпОРТНыМ МЕХАНизМОМ | 1978 |
|
SU813375A1 |
| Система автоматического управления строительно-дорожными и землеройно-транспортными машинами | 1991 |
|
SU1813144A3 |
| Устройство для программного управления технологическим оборудованием | 1986 |
|
SU1372277A1 |
| Машина для контактной стыковой сварки оплавлением | 1986 |
|
SU1388228A1 |
| Устройство для программного счета изделий | 1983 |
|
SU1113824A1 |
| Устройство для автоматического адресования подвижных объектов | 1986 |
|
SU1406096A1 |
| Устройство автоматического управления электродвигателем перемещения загрузочной машины | 1980 |
|
SU926486A1 |