ИзобретеНИе опнооится IK области Судо1вой автоматики И лредназначоно для :пост1роения разЛИчиых гидраВЛ1И1Ч0ски1Х .приборов, например датчн1ко1в И сипналйзаторОв.
Известен датч,И1К, садаржащий чувствительный и уюилительн-оннаспроечный блоки. Чу)в:ствителБНЫй |бло1К и-меет мехаетичеююи авязамные между собой чувствительный элемент и преобразующую часть с камерой обратной связи и усилительным элементом типа «сопло-заслонка - постоянный дроссель. Усилительнонастроеч-ный бло1к юадержят три еоследсивателыно соединенных элемента, с помощью которых осущес-лвляется 1на1ст|роЙ1ка датчиьа. Блоки датчика включены также последавателБно и С.вяза1ны фуякциопалыно одиой лииией.
Однако :при иопользавапйи IB качестве рабочей среды к.ч1ДК0 сти, HainipHMCip воды, и эксплуата ции прибора IB судовых условиях существует за1в.(мость выходного юи пнала от изменения гидравлического напора в трубопроводе, и требует1ся большое количество трубопроводов (питащие, слнв, вход, вьгход), подводимых 1К (Каждому |блакз пр-ибора.
Предлагабмый лреоб1разователь зюилия с гидравлическим выходом отличается от известных тем, что, с целью повыше1Н1Ия точности выходиого сигнала, преобразующий блок содержит образаваиные тремя .мймб|раеа1ми камеру обратной связги и -KaiMOpy, .на которой укреплено сопло, с вязаИ1ную со входом усилителя выходного блока, выход .которого соединен с камерой обратной связи. Причем усилитель
выходного блока охвачен обратной связью, содержащей делитель.
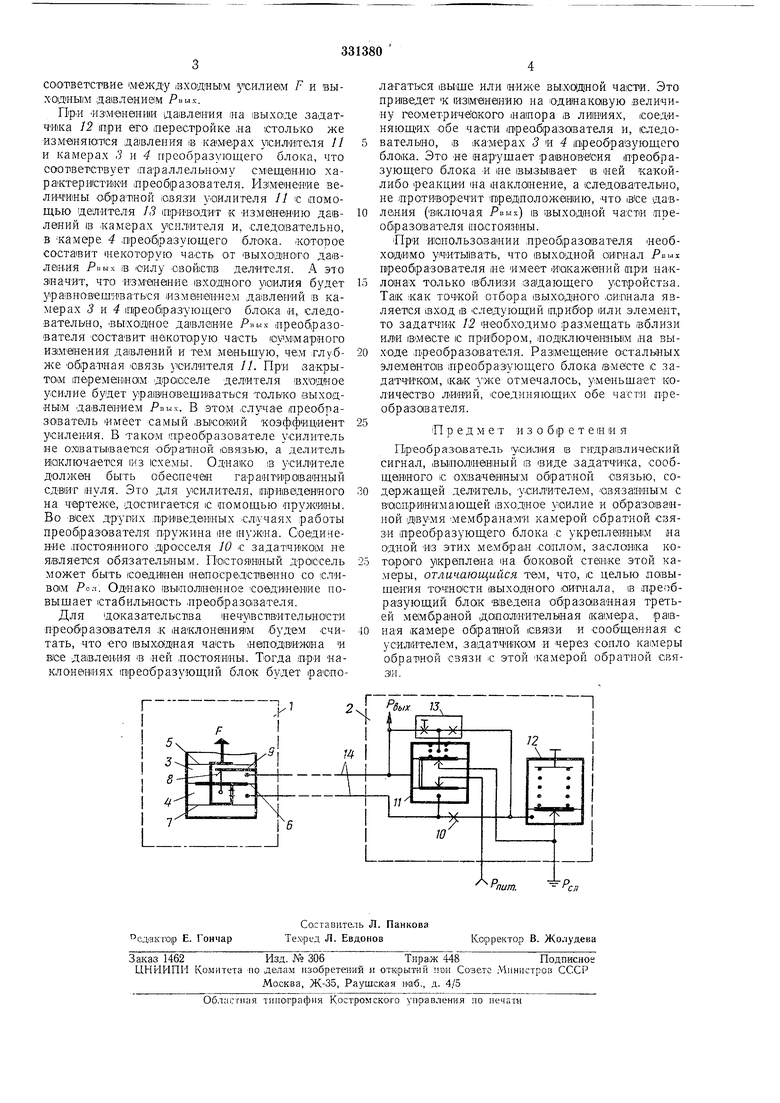
На чертеже показана принципиальная схема преобраз ователя усил-ия с гидравличеаквм выходом.
На схеме .приняты следующие обозиачания: У - 1преобразующий блок; 2-выходной блок; 3 - камера обратной связи; 4 - .ка мера; 5, 6, 7 - мембрайы; 8 - сопло; 9 - заслонка, 10 - постоянный дроссель; // - усилитель;
12 - задатчик; 13 - делитель; 14 - гидравлмчеокпе линии; F - Входное усилие; Рсл - слив и Явых- - выходной сигнал.
Преобразо ватель работает следующим образом. Входное усилие F. воздсйств ет на
связанные .между собой мембрайы 5, 6, и 7 преобразующего блока преобразователя, перемещает их. И31ме1няя зазор между соплом 8 и заслоикой 9, что приводит к изменению давления в ка;мере 4. Давление по гидравлической лиИИи передается на вход усилителя //. Усиленное да;влен1ие Рпых подводится л камере обратной связи 3, ураВНОВешивая входное усилие F. Причем, объем камеры 4 рав-еи объему камеры обратной овязк 5. Та-ким образом,
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРАВЛИЧЕСКИЙ ОПЕРАЦИОННЫЙ УСИЛИТЕЛЬ | 1969 |
|
SU251942A1 |
| ГИДРАВЛИЧЕСКОЕ МНОЖИТЕЛЬНО-ДЕЛИТЕЛЬНОЕ | 1973 |
|
SU394798A1 |
| ГИДРАВЛИЧЕСКОЕ ВЫЧИСЛИТЕЛЬНОЕ УСТРОЙСТВО | 1971 |
|
SU429428A1 |
| Устройство для измерения давления | 1972 |
|
SU447588A1 |
| ГИДРАВЛИЧЕСКИЙ БЛОК ПРЕОБРАЗОВАНИЯ И УСИЛЕНИЯ | 1964 |
|
SU164492A1 |
| ТРЕХКАСКАДНЫЙ ГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬМОЩНОСТИ | 1969 |
|
SU257241A1 |
| ГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ МОЩНОСТИ | 1972 |
|
SU339680A1 |
| Пневматический позиционный регулятор | 1979 |
|
SU903806A1 |
| ГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ | 1971 |
|
SU318731A1 |
| Электропневматический аналоговыйпРЕОбРАзОВАТЕль | 1978 |
|
SU808728A1 |
