Изобретение относится к области молотостроеиия и может быть использовано в системах программирования энергетического режима свободно ковки и горячей штамповки, а также в качестве контрольно-регистрирующей аппаратуры при составлении технологии, испытании и исследовании молотов.
Известен сприбор для определения скорости ударов падающих частей молота, содержащий закрепленную на бабе молота ползушку, кинематически связанную со смонтированным в кронштейнах на станине измерительным механизмом, а также электрически связанный с измерительным механизмом контрольно-регистрирующий блок, содержащий лентопротяжный механизм и жиклерные перья с системой подвески.
Предлагаемый ирибор отличается от известного тем, что измерительный механизм выполнен в виде установленной на кронштейнах в иодшипниках винтовой колонки и входящей в зацеиление с шариковой гайкой, неподвижно закрепленной па ползушке бабы, а также закрепленных на станине сельсинного датчика движения бабы, ротор которого соединен с винтовой колонкой, и двух сельсинных датчиков указателей скорости отскока бабы и указателя скорости при ударе, роторы которых кинематически связаны с винтовой колонкой через гироскопические волчки и центробежные маятники. При этом дистанпионный контрольно-регистрирующий блок снабжен кинематически связанными с системой подвески перьев тремя сельсиновы.ми приемниками, роторы которых электрически соединены с роторами соответствующих сельсинных датчиков измерительного механизма. Это обеспечивает дистанционный контроль и автоматическую запись закоиа движения бабы по всему
пути, графиков скорости ударов и отскоков бабы.
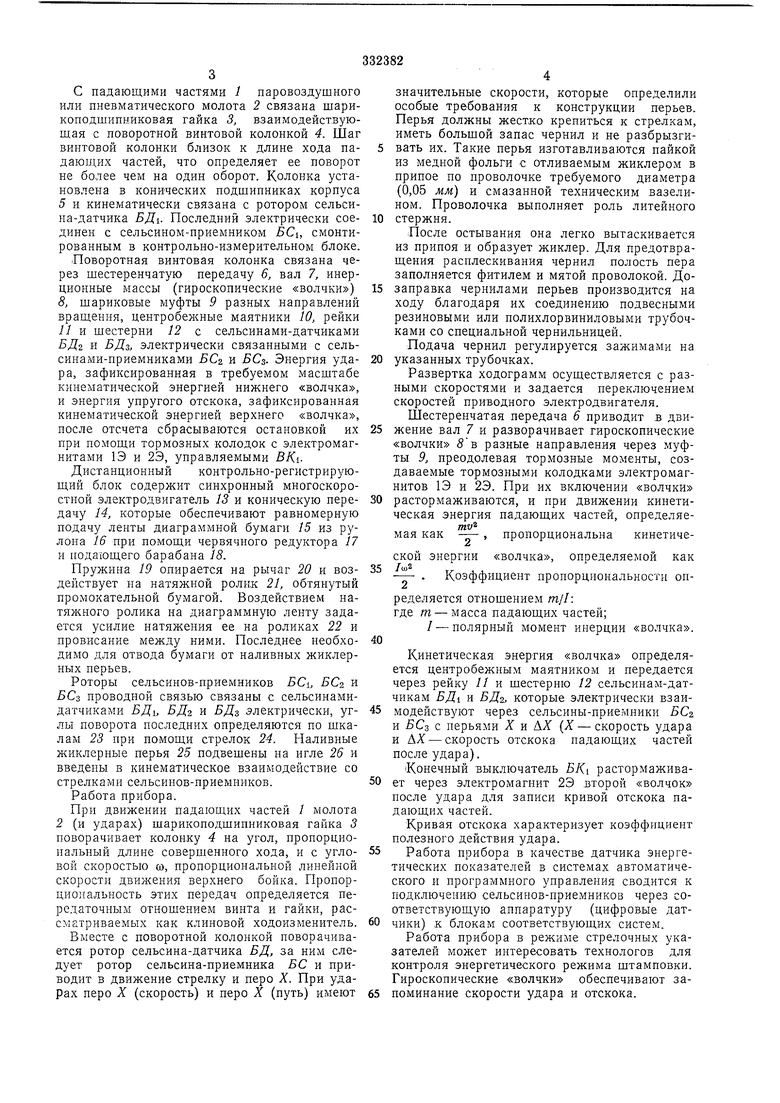
Иа фиг. 1 изображен пневматический приводной молот с навесной частью прибора; на фиг. 2 - паровоздушный молот с навесной
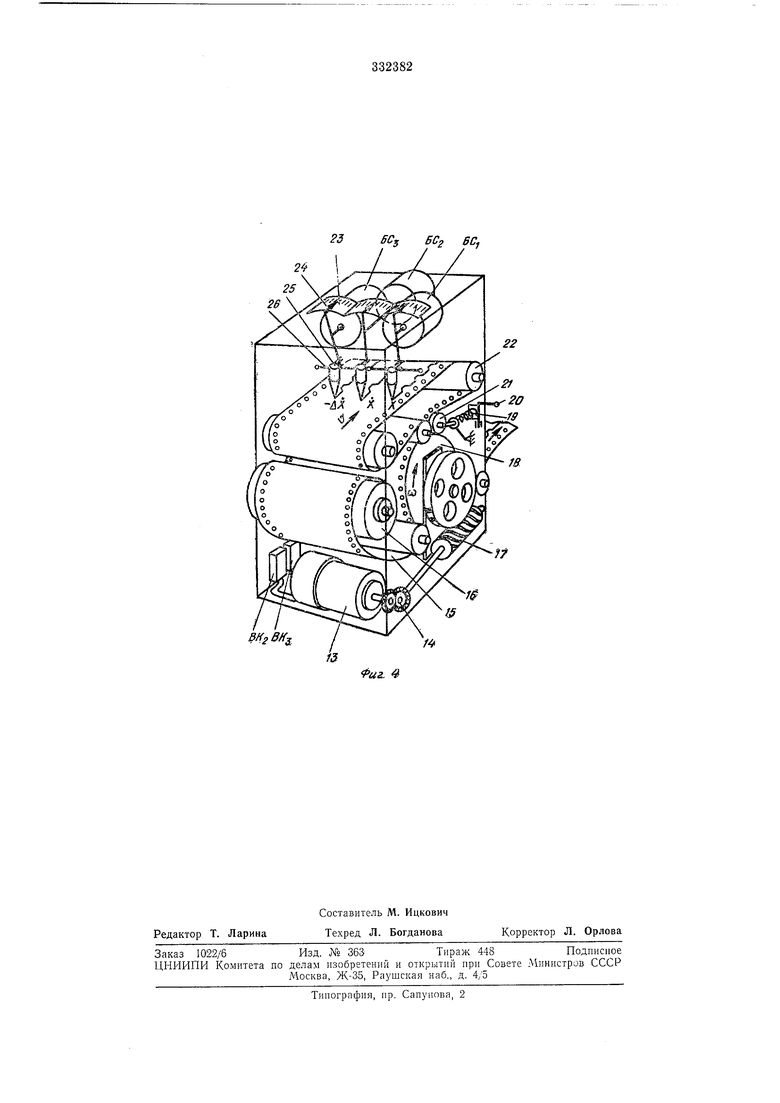
частью прибора; на фиг. 3 - кинематическая схема ирибора и разрез ио А-Л; на фиг. 4 - дистанционная часть ирибора.
Прибор для определения скорости удара падающих частей молота состоит из иавесно
измерительной системы и дистанционного контрольно-регистрирующего блока, соединяемых проводной связью.
Измерительная система прибора монтируется на крышке рабочего цилиндра пневматического ириводного молота (см. фиг. 1) или на стойках иаровоздушного молота (см. фиг. 2). Дистанционный контрольно-регистрирующий блок (см. фиг. 3) связан с измерительной системой гибким электрическим мноС падающими частями 1 паровоздушного или пневматического молота 2 связана шарикоподшипниковая гайка 3, взаимодействующая с поворотной винтовой колонкой 4. Шаг винтовой колонки близок к длине хода падающих частей, что определяет ее поворот не более чем на один оборот. Колонка установлена в конических подшипниках корпуса 5 и кинематически связана с ротором сельсина-датчика БДь Последний электрически соединен с сельсином-приемником БС, смонтированным в контрольно-измерительном блоке.
Поворотная винтовая колонка связана через шестеренчатую передачу 6, вал 7, инерционные массы (гироскопические «волчки) 8, шариковые муфты 9 разных направлений вращения, центробежные маятники 10, рейки // и шестерни 12 с сельсинами-датчиками БД2 и Дз, электрически связанными с сельсинами-приемниками BCz и BCs- Энергия удара, зафиксированная в требуемом масштабе кинематической энергией нижнего «волчка, и энергия упругого отскока, зафиксированная кинематической энергией верхнего «волчка, после отсчета сбрасываются остановкой их при помощи тормозных колодок с электромагнитами 1Э и 2Э, управляемыми BK.i.
Дистанционный контрольно-регистрирующий блок содержит синхронный многоскоростной электродвигатель 13 и коническую передачу 14, которые обеспечивают равномерную подачу ленты диаграммной бумаги 15 из рулона 16 при помощи червячного редуктора 17 и подающего барабана 18.
Пружина 19 опирается на рычаг 20 и воздействует на натяжной ролик 21, обтянутый промокательной бумагой. Воздействием натяжного ролика на диаграммную ленту задается усилие натяжения ее на роликах 22 и провисание между ними. Последнее необходимо для отвода бумаги от наливных жиклерных перьев.
Роторы сельсинов-приемников Ed, BCz и ВСъ проводной связью связаны с сельсинамидатчиками Дь ВД,2 и БДз электрически, углы поворота последних определяются по шкалам 23 при помощи стрелок 24. Паливные жиклерные перья 25 подвешены на игле 26 и введены в кинематическое взаимодействие со стрелками сельсинов-приемников.
Работа прибора.
При движении падающих частей 1 молота 2 (и ударах) шарикоподшипниковая гайка 3 поворачивает колонку 4 на угол, пропорциональный длине совершенного хода, и с угловой скоростью (О, пропорциональной линейной скорости движения верхнего бойка. Пропорциональность этих передач определяется передаточным отношением винта и гайки, рассматриваемых как клиновой ходоизменитель.
Вместе с поворотной колонкой поворачивается ротор сельсина-датчика ВД, за ним следует ротор сельсина-приемника БС и приводит в движение стрелку и перо X. При ударах перо X (скорость) и перо X (путь) имеют
значительные скорости, которые определили особые требования к конструкции перьев. Перья должны жестко крепиться к стрелкам, иметь большой запас чернил и не разбрызгивать их. Такие перья изготавливаются пайкой из медной фольги с отливаемым жиклером в припое по проволочке требуемого диаметра (0,05 мм) и смазанной техническим вазелином. Проволочка выполняет роль литейного 0 стержня.
После остывания она легко вытаскивается из припоя и образует жиклер. Для предотвращения расплескивания чернил полость пера заполняется фитилем и мятой проволокой. Дозаправка чернилами перьев производится на ходу благодаря их соединению подвесными резиновыми или полихлорвиниловыми трубочками со специальной чернильницей.
Подача чернил регулируется зажимами на 0 указанных трубочках.
Развертка ходограмм осуществляется с разными скоростями и задается переключением скоростей приводного электродвигателя.
Шестеренчатая передача 6 приводит ,в дви5 жение вал 7 и разворачивает гироскопические «волчки SB разные направления через муфты 9, преодолевая тормозные моменты, создаваемые тормозными колодками электромагнитов 1Э и 2Э. При их включении «волчки 0 растормаживаются, и при движении кинетическая энергия падающих частей, определяеmv
мая как -- , пропорциональна кинетической энергии «волчка, определяемой как - . Коэффициент пропорциональности определяется отношением /п//:
где т - масса падающих частей;
/ - полярный момент инерции «волчка.
Кинетическая энергия «волчка определяется центробежным маятником и передается через рейку 11 и шестерню 12 сельсинам-датчикам Bui и ВД2, которые электрически взаи5 модействуют через сельсины-приемники BCz
и BCz с перьями X и А.Х (X - скорость удара
и АХ - скорость отскока падающих частей
после удара).
Конечный выключатель /Ci растормаживает через электромагнит 2Э .второй «волчок после удара для записи кривой отскока падающих частей.
Кривая отскока характеризует коэффициент полезного действия удара.
Работа прибора в качестве датчика энергетических показателей в системах автоматического и программного управления сводится к подключению сельсинов-приемников через соответствующую аппаратуру (цифровые датчики) к блокам соответствующих систем.
Работа прибора в режиме стрелочных указателей может интересовать технологов для контроля энергетического режима штамповки. Гироскопические «волчки обеспечивают заСброс показаний стрелочных приборов и их включение производятся переключателем BKz. Переключатель BKz обеспечивает включение требуемой скорости подачи диаграммной ленты. Рычагом 20 нагружается пружина 19, под действием которой натяжной ролик 21 вводит в соприкосновение конусы перьев с бумагой. Прибор обеспечивает как непрерывную запись энергетического режима ковки или штамповки, так и выборочную запись энергетических показателей отдельных ударов. изобретения Прибор для определения скорости ударов падающих частей молота, содержащий закрепленную на бабе молота ползущку, кинематически связанную со смонтированным в кронштейнах на станине измерительным механизмом, а также электрически связанный с измерительным механизмом дистанционный контрольно-регистрирующий блок, содержащий лентопротяжный механизм п жиклерные 5 п -. LJ х / . 23 перья с системой подвески, отличающийся тем, что, с целью обеспечения дистанционного контроля и автоматической записи закона движения бабы, графиков скорости ударов и отскоков бабы, измерительный .механизм выполнен в виде установленной на кронштейнах в подшипниках винтовой колонки и входящей в зацепление с ней шариковой гайки, неподвижно закрепленной на ползушке бабы, а также закрепленнь1х на станине сельсинного датчика движения бабы, ротор которого соединен с винтовой колонкой, и двух сельсинны.х датчиков указателя скорости отскока бабы и указателя скорости при ударе, роторы которых кинематически связаны с винтовой колонкой через гироскопические волчки и центробежные маятники, при этом дистанционный контрольно-регистрирующий блок снабжен кинематически связанными с системой подвески перьев тремя сельсиновыми приемниками, роторы которых электрически соединены с роторами соответствующих сельсинных датчиков измерительного механизма.
23
2
25
26
/f Btf
ffCy всг 6Cf
if
22
//
IS
/4«
| название | год | авторы | номер документа |
|---|---|---|---|
| Геодезический нивелир-автомат на сельсинах | 1960 |
|
SU139084A1 |
| Схема управления молотом свободной ковки | 1973 |
|
SU490548A1 |
| Отрезной автомат | 1977 |
|
SU740414A1 |
| Измеритель угла наклона подвижного объекта | 1985 |
|
SU1255858A1 |
| Устройство для регистрации ширины дражного забоя | 1982 |
|
SU1082917A1 |
| Устройство для измерения угла закручивания бурильной колонны | 1982 |
|
SU1078037A1 |
| УСТРОЙСТВО для ПРОДУВКИ МЕТАЛЛА | 1972 |
|
SU326222A1 |
| Устройство для контроля дистанционной передачи угла поворота вала | 1983 |
|
SU1098020A1 |
| Путевая машина | 1982 |
|
SU1082891A1 |
| Устройство для ориентации сейсмоприемников в скважинах | 1982 |
|
SU1124236A1 |