управления регулятора с дистанционным унравлением сообщена с задающим датчиком давления 15 на нульте управления молотом.
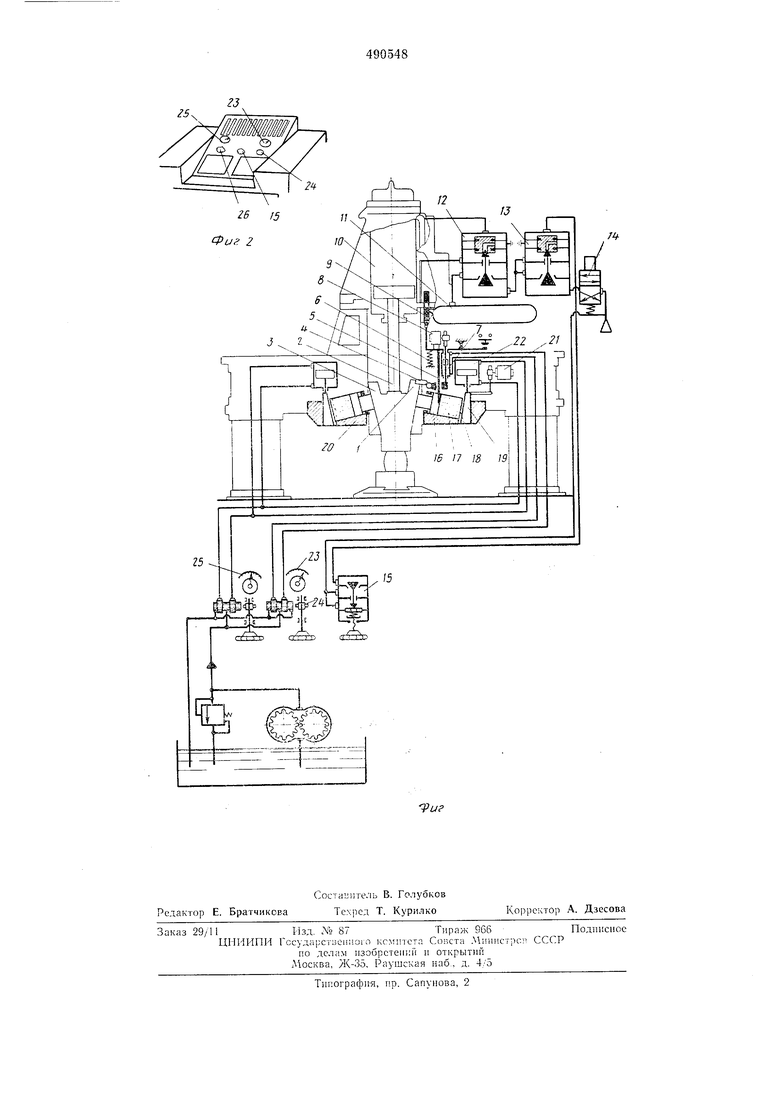
Компенсаторы избыточной энергии выполнены в виде плунжеров 16, опертых на упругие элементы 17 в контейнерах 18. Контейнеры взаимодействуют с клиновыми подушками 19, расклинивающими рамку 20. Клиновые подушки взаимодействуют с датчиком 21 сельсиниой передачи стрелочного указателя конечного размера поковки и порщнем приводного гидроцилиндра 22.
На пульте управления размещены сельсин-приемник 23 стрелочного указателя заданного размера поковки и золотник 24 управлеиия гидроцилиндрами выставления упругих упоров, а также сельсин-приемник 25 стрелочного указателя конечного размера поковки и золотник 26 унравления иеремещения ползушкн с роликом. На пульте смонтирована также сигнальная лампочка, которая загорается при включении включателя сигнальной сети правым плечом горизонтального рычага.
Система управления молотом свободной ковки работает следующим образом.
Прн приближении бабы к заданному размеру на величину, меньшую деформации поковки, одним ударом кулачок воздействует на ролнк. Последний новорачивает рычаг и включает сигнальную сеть. Поршень гидроцилиндра 7 и датчик 8 фиксируют заданное положение ролика. Левое плечо рычага воздействует на шиберный золотник, отсекая нижнюю полость рабочего цилиндра и создавая в ней большое буферное давление, гасящее кинетическую энергию бабы. Нижняя полость рабочего цилиндра через тот же щиберный золотник соединяется с дополнительной емкостью, давление в которой пропорционально перепаду давления между нижней и верхней полостями рабочего цилиндра. Дополнительная полость соединена с нневмосетью через автоматический регулятор давления, полости управления которого сообще нл с полостями рабочего цилиндра.
Оператор может управлять давлением в цнлиндре, изменяя давление в полости регулятора 13, входная полость которого получает сжатый газ из пиевмосети через воздухораспределитель.
Конечный размер поковки задается выставлением плунжеров компенсаторов избыточной энергии. Выставление ролика обеспечивает своевременное включение буферного торможепня бабы.
П р е д мет изобретен и я
Система управления молотом свободной ковки, содержащая смонтированные на боковых стойках станины компенсаторы избыточной энергии, входящие в контакт с опорными поверхностями бабы при ее нижнем положении, а также взаимодействующее с бабой устройство для регистрации положения бабы и регулирования иодачи энергоносителя в но;юсти рабочего цилнндра молота, отличающаяся тем, что, с целью повышения производительности, компенсаторы избыточной энергии выполнены в виде размещенных иаклонно к оси бабы и периендикулярно к выполненным наклонным опорным поверхностям бабы упругих элементов, опирающихся на связанные с гидроприводами и сельсиннымн указателями положения, клиновые упоры, а упомянутое устройство - в виде ролика ползущки, связанной с гидроприводом и сельсинным указателем ноложения и смонтированной на нормальном отростке подпружиненного горизонтального рычага, один конец которого взаимодействует с включателем сигнальной сети, а другой - с щиберным золотником, установленным на трубопроводе, сообщающем нижнюю полость рабочего цилиндра с цеховой пневмосетью через дополнительную емкость и задающий и следящий регуляторы давления.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ СКОРОСТИ УДАРА ПАДАЮЩИХ ЧАСТЕЙ МОЛОТА | 1972 |
|
SU332382A1 |
| Устройство программного управления паровоздушными молотами | 1960 |
|
SU133737A1 |
| УСТРОЙСТВО ДИСТАНЦИОННО-ПРОГРАММНОГО УПРАВЛЕНИЯ ПАРОВОЗДУШНЫМИ МОЛОТАМИ | 1970 |
|
SU276706A1 |
| Манипулятор | 1980 |
|
SU1003992A1 |
| Система управления штамповочным молотом | 1982 |
|
SU1034823A1 |
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ КОВОЧНЫМПРЕССОМ | 1967 |
|
SU200437A1 |
| Устройство осевого перемещения хобота ковочного манипулятора | 1971 |
|
SU682317A1 |
| КУЗНЕЧНЫЙ МОЛОТ С ГИДРАВЛИЧЕСКИМ ПРИВОДОМ | 2012 |
|
RU2505375C1 |
| ПНЕВМОЭЛЕКТРИЧЕСКОЬ УСТРОЙСТВО УПРАВЛЕНИЯ КОВОЧНЫМ МОЛОТОМ | 1968 |
|
SU208422A1 |
| Высокоскоростной молот | 1986 |
|
SU1428524A1 |