Изобретение относится к технике автоматического регулирования.
Известны системы, в которых структура изменяется с помощью изменения полярности сигнала ошибки, его производных и некоторых промежуточных координат в зависимости от совпадения или несовпадения знаков сигнала переключения и знаков переключаемых сигналов.
Недостатком известных систем является потеря или точности и устойчивости при наличии дестабилизирующих факторов.
Предлагаемая система позволяет обеспечить устойчивость и точность работы при наличии дестабилизирующих факторов.
Это достигается тем, что в ней дополнительно установлены блок дифференциаторов, включенный между промежуточным сумматором и исполнительным механизмом, и группа усилителей-преобразователей с логическими коммутационными устройствами, управляющие входы которых подсоединены к устройству формирования, выходы их подключены ко входам промежуточного сумматора, причем вход одного усилителя-преобразователя подключен ко входу системы, вход другого усилителя-преобразователя подключен к выходу исполнительного механизма, а выходы остальных усилителей-преобразователей подключены к выходу блока звеньев коррекции сравнивающего устройства.
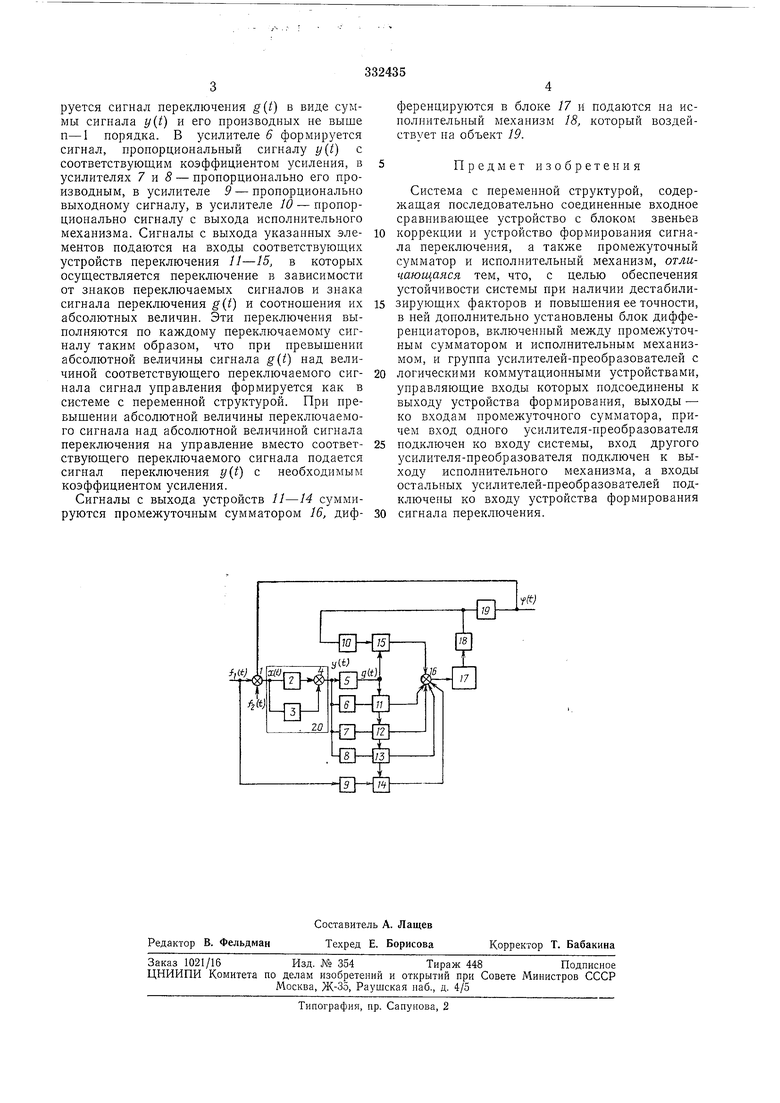
Блок-схема предлагаемой системы изображена на чертелсе. Система содержит входное
сравниваюпдее устройство /, фильтрующее устройство 2, интегрирующее устройство 3, сум.мирующее устройство 4, устройство 5 формирования сигнала переключения, 6-10 - усилители-преобразователи, формирующие
переключаемые сигналы, логические коммутационные устройства //-15 для переключения сигналов, учитывающие знаки и абсолютные величины переключаемых сигналов и сигналов переключения, промежуточный сумматор
16 для суммирования переключенных сигналов, блок 17 дифференциаторов для формирования суммы переключенных сигналов и их производных, исполнительный механизм 18, объект 19 управления, блок 20 звеньев коррекции.
На чертеже сигнал шума обозначен f.2(t) Система с неременной структурой работает следующим образом. Сигнал ошибки x(t) системы управления замеряется в устройстве /
как разность входного сигнала fi(t) и выходного сигнала ф() системы. Далее сигнал ошибки фильтруется и интегрируется в устройствах 2, 3, и оба полученных сигнала суммируются в су.ммирующем устройстве 4. Из
руется сигнал переключения g(t) в виде суммы сигнала y(t) и его производных не выше п-1 порядка. В усилителе 6 формируется сигнал, пропорциональный сигналу y(t) с соответствующим коэффициентом усиления, в усилителях 7 и S - пропорционально его производным, в усилителе 9 - пропорционально выходному сигналу, в усилителе 10 - пропорционально сигналу с выхода исполнительного механизма. Сигналы с выхода указанных элементов подаются на входы соответствующих устройств переключения 11-15, в которых осуществляется переключение в зависимости от знаков переключаемых сигналов и знака сигнала переключения g(t) и соотношения их абсолютных величин. Эти переключения выполняются по каждому переключаемому сигналу таким образом, что при превышении абсолютной величины сигнала g(t) над величиной соответствующего переключаемого сигнала сигнал управления формируется как в системе с переменной структурой. При превыщении абсолютной величины переключаемого сигнала над абсолютной величиной сигнала переключения на управление вместо соответствующего переключаемого сигнала подается сигнал переключения y(t) с необходимым коэффициентом усиления.
Сигналы с выхода устройств 11-14 суммируются промежуточным сумматором 16, дифференцируются в блоке 17 и подаются на исполнительный механизм 18, который воздействует на объект 19.
Предмет изобретения
Система с переменной структурой, содержащая последовательно соединенные входное сравнивающее устройство с блоком звеньев
коррекции и устройство формирования сигнала переключения, а также промежуточный сумматор и исполнительный механизм, отличающаяся тем, что, с целью обеспечения устойчивости системы при наличии дестабилизирующих факторов и повыщения ее точности, в ней дополнительно установлены блок дифференциаторов, включенный между промежуточным сумматором и исполнительным механизмом, и группа усилителей-преобразователей с
логическими коммутационными устройствами, управляющие входы которых подсоединены к выходу устройства формирования, выходы - ко входам промежуточного сумматора, причем вход одного усилителя-преобразователя
подключен ко входу системы, вход другого усилителя-преобразователя подключен к выходу исполнительного механизма, а входы остальных усилителей-преобразователей подключены ко входу устройства формирования
сигнала переключения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор с переменной структурой | 1978 |
|
SU748346A1 |
| Следящая система | 1977 |
|
SU642676A1 |
| СПОСОЬ РЕГУЛИРОВАНИЯ ИНЕРЦИОННЫХ ОБЪЕКТОВ, ОПИСЫВАЕМЫХ ДИФФЕРЕНЦИАЛЬНЫМИ УРАВНЕНИЯМИп-ого ПОРЯДКА | 1969 |
|
SU239405A1 |
| Следящая система | 1980 |
|
SU941925A1 |
| Устройство для управления инерционнымОб'ЕКТОМ | 1979 |
|
SU802924A2 |
| Импульсный регулятор | 1982 |
|
SU1105859A1 |
| Устройство для регулирования температурного режима в колонне синтеза метанола | 1980 |
|
SU889654A1 |
| Импульсный регулятор | 1983 |
|
SU1117585A1 |
| ПЕРЕМЕННОЙ СТРУКТУРОЙ | 1970 |
|
SU288083A1 |
| Устройство для управления дистанционным манипулятором | 1988 |
|
SU1650427A2 |
