Изобретение относится к устройствам для определения наклона движущихся объектов, в частности к устройствам для измерения угла наклона монтируемого аппарата npji подъеме методом поворота, и может найти применение в строительно-монтажных работах.
В известных устройствах для из.мерения угла наклона монтируемого аппарата при подъеме методом поворота, содержащие корпус с основанием, маятник с шарнирной подвеской, ограничительные упоры, установленные на корпусе, и регистрирующий прибор, маятник и регистрирующий прибор связаны ползунком, жестко закрепленным на маятнике, а упоры вынолнены неподвижными, иго не обеспечивает высокой точности измерений и возможности применения прибора для контроля углов наклона аппарата на всем участке подъема. Кроме этого, известные устройства не могут быть использованы для коптроля разделения зоны подъема на два контролируемых участка (подъем и дотягивание) и для измерений в широком диапазоне соотношения этих участков.
Предлагаемое устройство снабжено сферическим сектором, выполненным с возможностью перемещения по направляющей, радиус кривизны которой равен радиусу кривизны сектора, через вершину которого проходит ось подвески основного маятника, л дополнительный маятник через переключатель электрически связан с электроконтактным и ограничительными упорами, подвижно закрепленными па шкале, что позволяет повысить точность измерений и контроль разделения зоны подъема на два контролируемых участка (подъем и дотягивание), а также расширить диапазон соотношения контролируемых участков.
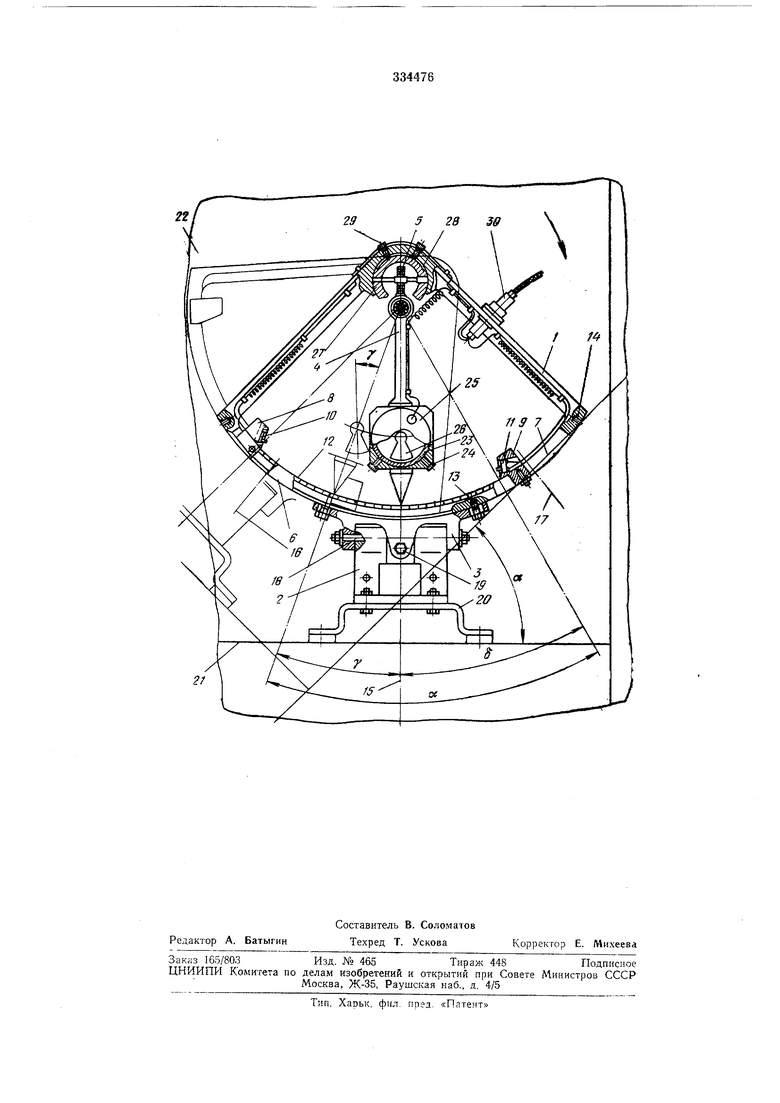
На чертеже показан общий вид предлагаемого устройства, закрепленного на аппарате (сплошными тонкими линнямн показано iraклонное положенне аппарата н устройства;
ось вращения аппарата условно совмещена с осью вращения маятника; стрелкой показано направление вращения аппарата).
Устройство содержит корпус 1, выполненный в виде сферического сектора, основанн,2 с опорой 3 н маятник 4, прикрепленный к корнусу 1 с помощью щарнирной подвески .5В корпусе 1 выполнены направляющие пазы б и 7, в которые помещены упоры 8 и 9. Эти упоры снабжены электроконтактами 10 и //. Между крайними положениями упоров 8 и 9 нанесена шкала 12.
Корпус / связан с опорой 3 с помощью винтов 13, ввернутых в резьбовые отверстие 14 в корнусе 1. Осевой линией 15 обозначено
но опоры 3. Осевыми линиями /5 и 17 обозначены крайние положения корпуса / относительно опоры 3, которая прикреплена к основанию 2 осью 18. Положение опоры 3 с корпусом / при повороте относительно основания 2 вокруг оси 18 зафиксировано винтами 19 (один из этих винтов расположен с противоположной стороны опоры 3 и на чертеже не показан). Основание 2 содержит скобу 20, которой устройство прикреплено к поверхности 21 аппарата 22.
На маятнике 4 в цилиндрическом проеме 23 с помощью винтов 24 шарнирно закреплен угломерный датчик 25. Последний содержит чувствительный элемент, вьгаолненный, например в виде маятника 26. Подвеска 5 шарннрно связана с корпусом с помоодью полукольца 27, расположенного в обопме 28. Положение полукольца 27 в обойме 28 зафиксировано винтами 29. Угломерный датчик 25 и электроконтакты W и 11 электрически связаны через штепсельный разъем 30 и переключатель с регистрирующим прибором (на чертеже не показан).
Одно из наклонных положений аппарата 22 обозначено углом а . Углами rf н обозначены углы между первоначальным положением маятника 4 и положениями упора 9 соответственно до наклона аппарата 22 и после наклона аппарата на угол а. При этом углу т соответствует угловое отклонение чувствительного элемента 26 угломерного датчика 25 при отклонении маятника 4 на угол т.
Предлагаемое устройство работает следующим образом.
Корпус / закрепляют на опоре 3 в одном из положений, обозначенных осевыми линиями 15, 16 и 17. Выбор необходимого положения для закрепления корпуса 1 на опоре . производят в зависимости от направления и величины углового поворота аппарата 22 с учетом наклона поверхности в месте установки зстройства. Выверку корпуса / относительно маятника 4 производят с помощью винтов 13, 19 и 29 и проверяют соответствие исходного положения чувствительного элемента 26 датчика 25 выверенному положению маятника 4.
Для корректировки положения датчика 25 используют винты 24. Используя щкалу 12, закрепляют упоры S и Р в направляющих пазах 6 н 7 корпуса 1. Место установки упоров
8 и 9 в направляющих пазах 6 н 7 определяют в зависимости от паправления, величины полного углового поворота а аппарата 22 и соотнощения углов 5 и т, соответствующих участку подъема (угол ) и участку дотягивания (угол т) аппарата 22.
При повороте аппарата 22 на угол а упор 9 соверщает угловой путь, равный сумме углов и т. В конце углового пути / и начале углового пути т упор 9 соприкасается с маятником 4, электроконтакт 11 замыкается, регистрируя окончание участка подъема и начало участка дотягивания аппарата 22.
На всем участке углового пути т электрпконтакт 11 находится в замкнутом состоянии.
Об изменении углового положения аппарата 22 на участке углового пути г сигнализирует чувствительный элемент 26 датчика 25. Сигнал электроконтакта // и показания датчика 25 дистанционно наблюдают регистрирующим
прибором, вынесенным на безопасное расстояние. Электроконтактами 10 и // и датчиком 25 устройство может быть подключено к системе автоматизации процесса подъема аппарата 22.
Устройство дополнительно может быть использовано при демонтаже вертикальных аппаратов.
Предмет изобретения
Устройство для измерения угла наклона содержащее маятник со шкалой, в центре т; жести которого укреплен дополнительный маятник, и ограничительные упоры, отличающееся тем, что, с целью расширения диапазона измерений, оно снабжено сферическим сектором, выполненным с возможностью перемещения по направляющей, радиус кривизны которой равен радиусу кривизны сектора, через верщину которого проходит ось подвески основного маятпика, а дополнительный маятник через переключатель электрически связан с электроконтактными ограничительными, упорами, подвижно закрепленными на шкале.
21
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик угла наклона | 1976 |
|
SU682761A1 |
| Смеситель принудительного действия | 1991 |
|
SU1766682A1 |
| Механический инклинометр | 1978 |
|
SU911020A1 |
| Аппарат для контролирования правильности подачи листов и отделения незапечатанных и бракованных листов на листовых печатных машинах | 1961 |
|
SU145595A1 |
| Путевая машина | 1982 |
|
SU1082891A1 |
| БЛОК ИНКЛИНОМЕТРИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ | 2007 |
|
RU2359121C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ БЛОКОВ, УСТРОЙСТВО ДЛЯ СБОРКИ И СМАЗКИ ПЕРЕГОРОДОК И БЕСПОДДОННЫЙ ЗАХВАТ | 2002 |
|
RU2244079C2 |
| Автоматизированная установка для ультразвукового контроля изделий | 1989 |
|
SU1767410A1 |
| Фотоэлектрическое устройство для измерения угла наклона объекта | 1977 |
|
SU690289A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПО АНАЛИТИЧЕСКОЙ ИНФОРМАЦИИ КОМПЕНСАТОРНЫХ ТРУБ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1996 |
|
RU2126305C1 |