Известны приводы токоприемников (пантографов), которые выполнены так что самопроизвольному (под действием воздушного потока) подъему опущенного токоприемника препятствует только упругая сила опускающей пружины.
В связи с увеличением скоростей движения электроподвижного состава величины аэродинамической подъемной силы возрастают и для удержания нерабочих токоприемников в опущенном положении требуется значительно усиливать опускающие пружины, а следовательно и увеличивать диаметры пневматических цилиндров приводов. Это свидетельствует о недостатках серийных приводов.
Известны самозаиирающиеся приводы с использованием в качестве запора кулачка.
Однако для удовлетворительной работы такого привода требуется очень высокая точность расстояния, между осями вращения кулачка и главного вала. Малейщее отступление его от нормы, например, вследствие прогиба главного вала, приводит к срыву-мгновенному подъему подвижных рам и сильному удару полоза о контактный провод, что недопустимо.
В предлагаемом изобретении с целью надежной фиксации подвижных рам в нерабочем состоянии он снаб}кен U-образным двупле4JM рычагом, одно плечо которого соединено
с тягой, связанной с пневматическим цилиМДром, а другое - с тягой, связанной с опускающим рычагом на главном валу.
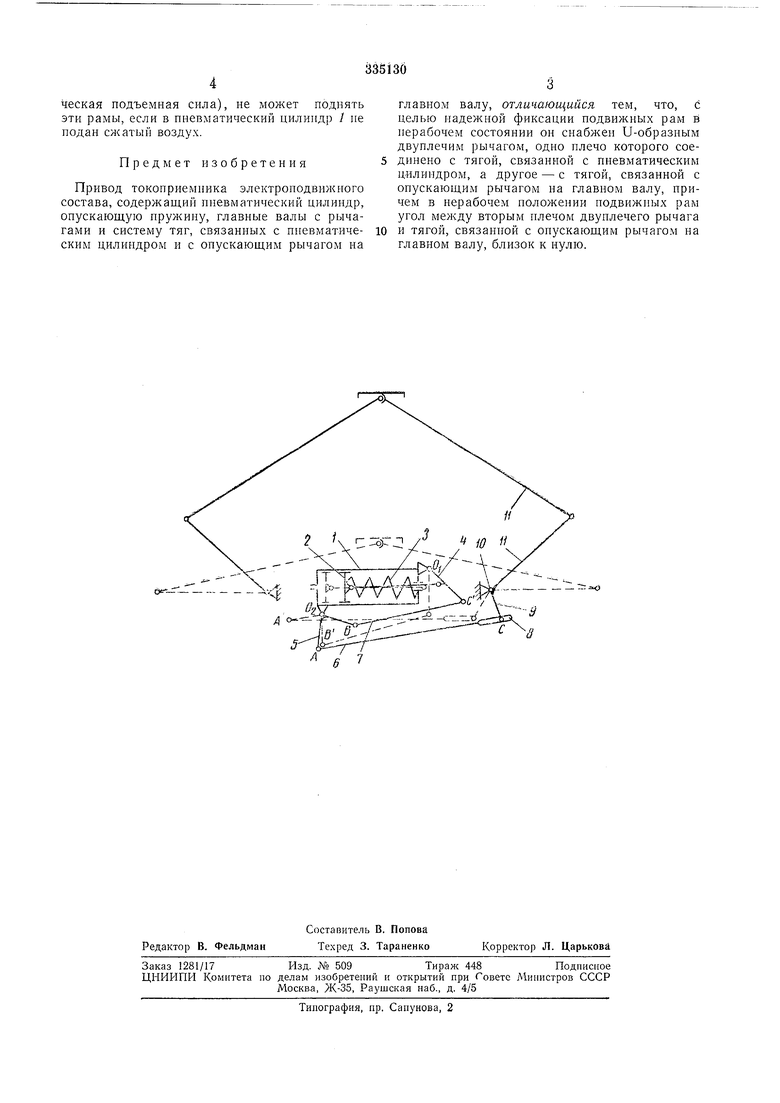
На чертеже изображено предлагаемое устройство.
Основными элементами привода являются пневматический цилиндр /, внутри которого расположены поршень 2 и опускающая пружина 3, рычаг 4, шарнирно соединенный со щтоком цилиндра и вращающийся вокруг оси Oi, двуплечий рычаг 5, вращающийся вокруг неподвижной оси Ог, тяги 6 и 7, тяга 6 оканчивается кулисой 8, которая может воздействовать через рычаг Я закрепленный на главном валу 10, на подвижные рамы 11.
Ири подаче сжатого воздуха в цилиндр / элементы привода находятся в положениях, изображенных на рисунке сплошпыми линиями, при отсутствии сжатого воздуха - изображенных штриховыми линиями.
Расположение двуплечего рычага 5 (при отсутствии сжатого воздуха в цилиндре У) в положении , когда угол 02АС близок к нулю (это соответствует мертвому положению кривошиппо-шатунного механизма), препятствует повороту этого рычага сколь угодно большой внещней силой, приложенной к тяге 6 вдоль ее направления. А это означает, что никакая внешняя сила, приложепная к подвил ;ным рамам (например, аэродинамическая подъемная сила), не может поднять эти рамы, если в пневматический цилиндр / не подан сжатый воздух.
Предмет изобретения
Привод токоприемника электронодвижного состава, содержащий пневматический цилиндр, опускающую пружину, главные валы с рычагами и систему тяг, связанных с пневматическим цилиндром и с опускающим рычагом на
главном валу, отличающийся тем, что, с целью надежной фиксации подвилсных рам в нерабочем состоянии он снабжен U-образным двуплечим рычагом, одно плечо которого соединено с тягой, связанной с пневматическим цилиндром, а другое - с тягой, связанной с опускающим рычагом на главном валу, причем в нерабочем положении подвижных рам угол между вторым плечом двуплечего рычага и тягой, связанной с онускающим рычагом на главном валу, близок к нулю.
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод токоприемника электроподвижного состава | 1976 |
|
SU629093A1 |
| ТОКОПРИЕМНИК РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 1998 |
|
RU2188136C2 |
| Токоприемник электроподвижного состава | 1974 |
|
SU500091A1 |
| ПРИВОД МЕХАНИЗМА ОПУСКАНИЯ ТОКОПРИЕМНИКА ТИПА ПАНТОГРАФ | 1970 |
|
SU262142A1 |
| АСИММЕТРИЧНЫЙ ТОКОПРИЕМНИК ДЛЯ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2009 |
|
RU2428327C1 |
| ТОКОПРИЕМНИК ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2008 |
|
RU2368513C1 |
| АСИММЕТРИЧНЫЙ ТОКОПРИЕМНИК ДЛЯ ЭЛЕКТРОПОЕЗДОВ | 2004 |
|
RU2272720C1 |
| Токоприемник для транспортного средства | 1985 |
|
SU1283127A1 |
| ТОКОСЪЕМНОЕ УСТРОЙСТВО | 2001 |
|
RU2191708C2 |
| УСТРОЙСТВО для РАСПРЕССОВКИ БУКС | 1968 |
|
SU206992A1 |
-
