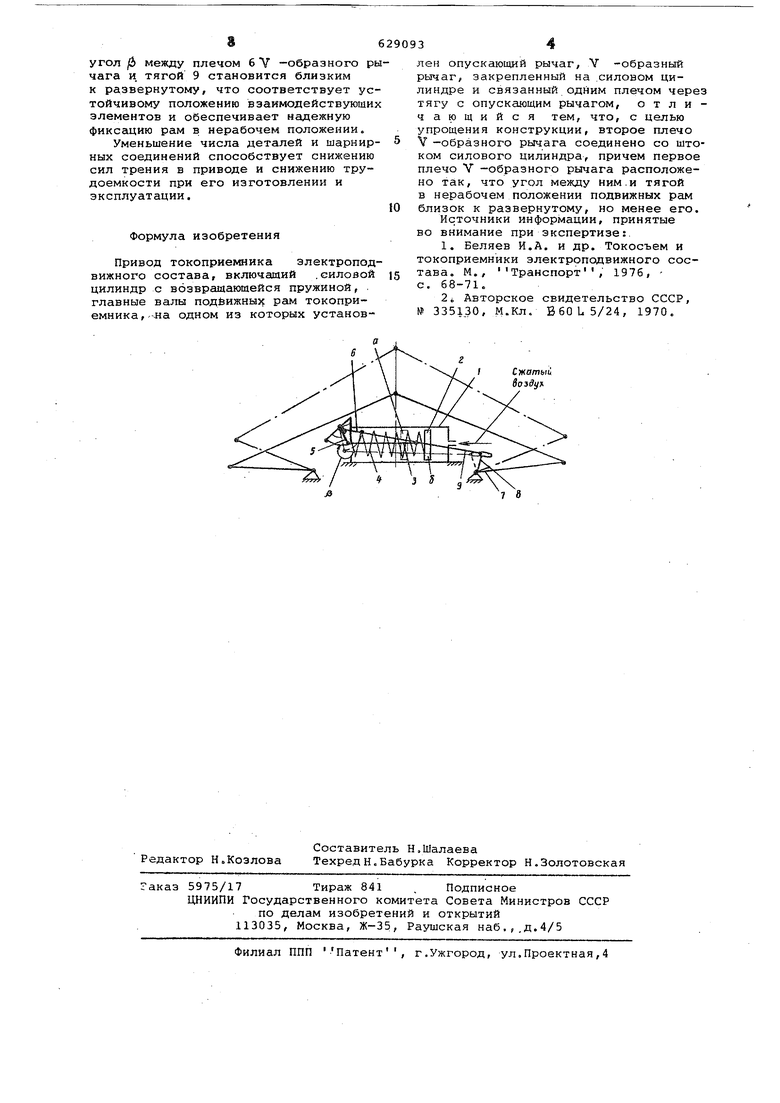
Изобретение относится к .пневматическим приводам подвижных рам токоприемников злектроподвижного состава Известны пневматические приводы, содержащие силовой цилиндр с пружиной, систему рычагов и тяг, при помощи которых осушествляется передача усилия от привода на валы подвижных рам и фиксация последних в рабочем положении Д. Однако в таких конструкциях фиксация подвижных рам в нерабочем положении осушествляется уси лием, развиваемым пружиной привода, из-за чего размеры пружины привода в. целом увеличиваются. Известен, также привод токоприемника электроподвижного состава, вклю чающий силовой цилиндр с возвращающёйся пружиной., главные валы подвижных рам токоприемника, на одном из ко торых установлен опускающий рычаг, V -образный рычаг, шарнирно-закрепле ный на цилиндре и связанный одним плечом через тягу с опускающим рычагом 2 . В такой конструкции фиксация подвижных рам в нерабочем положении достигается за счет того, что угол между плечом V т-образного рыча.га и тягой близок к нулю. Однако многоступенчатость конструкции делает привод сложным и неэкономичным. Цель изобретения - упрощение конструкции. то достигается тем, что второе плечо V -образного рычага соединено со штоком силового цилиндра, причем первое плечо V -образного рычага расположено так, что угол ним и.тягой в нерабочем положении подвижных рам близок к развернутому, но менее его. На чертеже показан привод токоприемника. Привод содержит силовой цилиндр 1, в котором.установлены поршень 2 со штоком 3 и возвращающаяся пружина 4, связанная с поршнем. На внешней поверхности-цилиндра шарнирно закреплен V -образный рычаг с плечами 5 и 6, Один из главных валов 7 подвижных рам токоприемника снабжен спускаюшим рычагом 8, связанным через тягу 9 с плечом 6 V -образного рычага. При необходимости опустить токоприемник воздух из камеры цилиндра 1 выбрасывается, при этом поршень 2 под действием пружины 4 перемешается из положения а в положение гГ , а угол jb между плечом 6 V -образного ры чага и тягой 9 становится близким к развернутому, что соответствует устойчивому положению взаимодействующих элементов и обеспечивает надежную фиксацию рам в нерабочем положении. Уменьшение числа деталей и шарнирных соединений способствует снижению сил трения в приводе и снижению трудоемкости при его изготовлении и эксплуатации. Формула изобретения Привод токоприемника злектропод вижного состава, включащий .силовой цилиндр с возврашаюшейся пружиной, главные валы подвижны} pciM токоприемника,-на одном из которых установ/Сжотыь
возду
7 8 34 лен опускающий рычаг, V -образный рычаг, закрепленный на .силовом цилиндре и связанный одним плечом через тягу с опускающим рычагом, о т л и ч ающийся тем, что, с целью упрощения конструкции, второе плечо V -образного рычага соединено со штоком силового цилиндра, причем первое плечо V -образного рычага расположено так, что угол между ним.и тягой в нерабочем положении подвижных рам близок к развернутому, но менее его. Источники информации, принятые во внимание при экспертизе:. 1. Беляев И.А, и др. Токосъем и токоприемники электроподвижного состава. М., Транспорт, 1976, с. 68-71. 2i, Авторское свидетельство СССР, № 335130, М.Кл. B60L5/24, 1970.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД ТОКОПРИЕМНИКА ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 1972 |
|
SU335130A1 |
| ТОКОПРИЕМНИК РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 1998 |
|
RU2188136C2 |
| ПРИВОД МЕХАНИЗМА ОПУСКАНИЯ ТОКОПРИЕМНИКА ТИПА ПАНТОГРАФ | 1970 |
|
SU262142A1 |
| АСИММЕТРИЧНЫЙ ТОКОПРИЕМНИК ДЛЯ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2009 |
|
RU2428327C1 |
| ПАНТОГРАФ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 1970 |
|
SU262932A1 |
| Токоприемник электроподвижного состава | 1974 |
|
SU500091A1 |
| ТОКОПРИЕМНИК ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2008 |
|
RU2368513C1 |
| АСИММЕТРИЧНЫЙ ТОКОПРИЕМНИК ДЛЯ ЭЛЕКТРИЧЕСКОГО ПОДВИЖНОГО СОСТАВА | 2000 |
|
RU2194630C2 |
| Токоприемник для электроподвижного состава с автоматическим аварийным опусканием | 1976 |
|
SU539793A1 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ ШТУЧНЫХ ГРУЗОВ | 1938 |
|
SU57816A1 |
