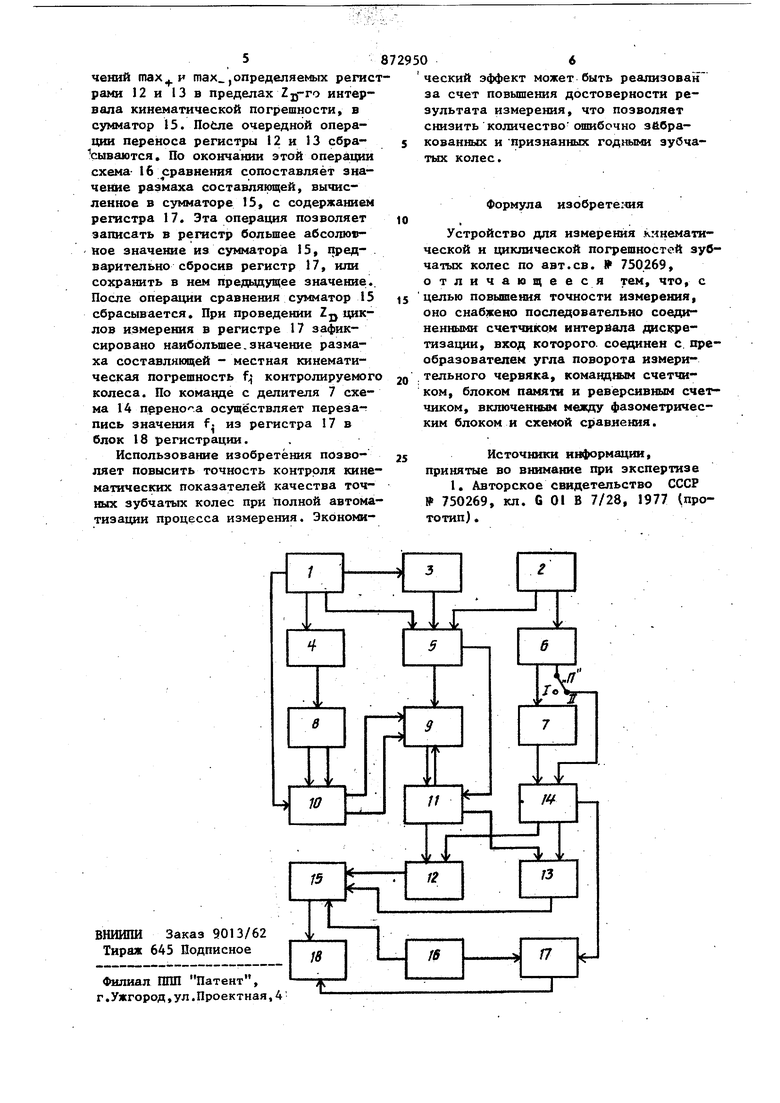
(54) УСТРОЙСТВО ДЛЯ- ИЗМЕРЕНИЯ КИНЕМАТИЧЕСКОЙ И ЦИКЛИЧЕСКбЙ ПОГРЕШНОСТЕЙ ЗУБЧАТЫХ КОЛЕС Изобретение относится к линейноугловым измерениям, а именно, для контроля зубчатых колес. По основному авт. св. № 750269 известно устройство для измерения ки нематической и циклической погрешностей зубчатых колес, содержащее од нотипные преобразователи угла поворота, соосно соединенные с измерител ным червяком и контролируемым колесом, делитель образцового передаточного отношения, фазометрический блок схему сравнения, регистры запоминания, схему переноса, сумматор ошибки пересчетные делители, схему сравнения значений размаха составляющей погрешности, регистр запоминания значения размаха составляющей и блок регистрации результатов измерения. Выход сумматора ошибки подключен через схему сравнения значений размаха cor ставляющей погрешности к регистру запоминания значения размаха доставляющей, а выход регистра соединен с блоком регистрации погрешности ГО « Однако в связи с тем, что измерительный червяк имеет погрешность винтовой линии и величина этой погрешности соизмерима с контролируемой, особенно при контроле прецизионных колес, устройство не обеспечивает достоверных результатов измерения. Целью изобретения является повыг шение точности измерения. Указанная цель достигается тем, что устройство снабжено последовательно соединенными счетчиком интвр&ала дискретизации, вход которого соединен с преобразователем угла поворота измерительного червяка, комацдныи счетчиком, блоком памяти и реверсяв-г ным счетчиком, включенным мел:ду фазометрическим блоком и схемой сравнения. На чертеже представлена схема устройства. 3. Она состоит из однотипных праобрвзователей 1 и 2 угла поворота, соосно соединенных с измерительным чер вяком и контролируемым зубчатым коле сом (на чертеже не показано), делителя 3, который согласовывает частоты сигналов преобразователей, счетчика 4 интервалов дискретизации, фаарметрического блока 5, делителей 6 и.7 для установки нужного периода контроли руемой составляющей кинемати ческой погрещности, командного счетчика 8, KOTOptdi определяет номер команды коррекции, реверсивного счетчика 9, в котором в результате измерения вводится коррекция, лредвари тельно занесенная в блок 10 памяти, cxei«4 1 сравнения, регистров 12 и 13, схемы 14 переноси, которая прзволяет записать значения из регистров 12 и 13 в сумматор 15 ошибки, схемы 16 сравнения, которая сопоставляет содержание сумматора 15 с регистром 17 и блока 18 регистрации, который регистрирует результат из 1ерения. Пр этом счетчик 4 интервалов дискретиза ции, командный счетчик.8, блок ,10 п мяти и реверсивный счетчик 9 соедине последовательно. Вход-счетчика 4 сое нен с преобразователем 1 угла поворо который также соединен с блоком 10 памяти,а реверсивный счетчик 9 включ между фазометрическим блоком 5 и схе мой 11 сравнения. Устройство работает следующим обр зом, Перед контролем в делителе 3 уста навливают значение Z (число зубвев контролируемого колеса), в счетчике 4 значение N/K (N- число отсчетов на оборот преобразователя, К - число ин тер19алов дискретизации систематической пограпности.винтовой линии измерительного червяка), в делителе 6 значетше - передаточное отно шение делительной пары зубообрабатывающего станка), а в делителе 7 значение 2, в блок 10 памяти вводят К значений поправки Л. с учетом знака адреса - номера интервала. Значение поправки определяют предварительно п диаграмме погрешности винтовой линии червяка, измеренной по расчетной лийии зацепления (например, с помощью прибора для контроля червячных фрез Карл Цейс Йена)., В режиме контроля кинематической погрешности перек вочатель П устанавливается в положение Т. При включении привода с преобразователя 2 запускает схему измерения, { пульсы с преобразователя Iпоступают в делитель 3 и счетчик 4 интервалов дискретизшцш, а также в блок to памяти, где устанавливают значения поправки дпя соответствующего интервала по углу поворота измерительного червяка. Числовой эквиBajieuT дискретного значения кинематической погрешности тгшсляется в фазометрическом блока 5, где фазовый сдвиг (интервал) квантуется счетны: ми импульсами преобразователя 1. Очередность прихода импульсов с преобразователя 2 и делителя 3 определяет знак диcкJpeтиoгo значения погрешности. Стоп-импульс инте1;$вала служит командой переноса значения, зафиксированного фазометричесгим блоком 5, в реверсивный счетчик 9. По этой же команде с задержкой по времени схема I1сравнения сопоставляет значение в счетчике 9 со значением регистра 12 ;или 13. Операция сравнения позволяет записать в регистр большее абсолютное значение из счетчика 9, предварительно сбросив регистр, или сохранить в регистре предыдущее значение. При переполнении счетчика 4 интервалов дискретизации /К -импульс проходит в командный счетчик 8, с которого поступает команда в блок 10 памяти по соответствующему адресу - номеру интервала. Эта команда используется для переноса поправки в счетчик 9 в зависимости от ее знака к шине сложения или вычитания счетчика 9 . После операции сравнения фазометрический блок 5 и счетчик 9 сбрасываются. В результате за эесь кинематический цикл в регистре 12 запишетсяmax положктельное значение, а в регистре 13 max отрицательное значение кинематической, погрешности(с учетом коррекции), и N-ый импульс с преобразователя 2, пройдя делители 6 и 7, подает команду схеме 14 переноса. По этой команде схема 14 осуществляет последователы ую перезапись значений из регистров 12 и 13 в сумматор 15 ошибки, в котором определяется значение кинематической погр ности, которое и регистрируется блоком 18. В режиме контроля щпслической (местной) кинематической погрешности переключатель П устанавливают в положение Т Г и период измерения определяется NiZpимпульсами с преобразователя 2, Схема 14 переноса осуществляет запись значений птахой тах,определяемых регисрами 12 и 13 в пределах Zjj-го интервала кинематической погрешности, в сумматор 15. Пойле очередной операции переноса регистры 12 и 13 сбраЪываются. По окончании этой операции схема- 16 сравнения сопоставляет значение размаха составляющей, вычисленное в сумматоре 15, с содержанием регистра 17. Эта операция позволяет записать в регистр большее абсолюиное значение из сумматора 15, пред- . варительно сбросив регистр I7, или сохранить в нем предыдущее значение.. После операции сравнения сумматор 15 сбрасывается. При проведении Zjj циклов измерения в регистре 17 зафиксировано наибольшее.значение размаха составляющей - местная кинематическая погрешность f контролируемого колеса. По комацде с делителя 7 схема 14 переноса осуществляет перезапись значения f. из регистра 17 в блок 18 регистрации.
Использование изобретения позво- ляет повысить точность контроля кинематических показателей качества точных зубчатых колес при полной автоматиза1Ц1и процесса измерения. Экономи ческий эффект может быть реализован за счет повышения достоверности результата измерения, что позволяет снизить количествоошибочно забракованных и Признанных годными зубчатых колес.
Формула изобрете:1ия
Устройство для измерения .кинематической и циклической погрешностей зубча-плх колес по авт.св. 750269, отличающееся тем, что, с целью повышения точности измерения, оно снабжено последовательно соединенными счетчиком интервала дискретизации, вход которого, соединен с. преобразователем угла поворота измерительного червяка, командным счетчиком, блоком пшют и реверсивным счетчиком, включенным между фазометрическим блоком и схемой сравнения.
Источники информации, принятые во внимание при экспертизе I. Авторское свидетельство СССР 750269, кл. G 01 В 7/28, 1977 (прототип) ,
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения кинематической и циклической погрешностей зубчатых колес | 1977 |
|
SU750269A2 |
| Устройство для измерения кинематической погрешности зубчатой передачи | 1972 |
|
SU442367A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КИНЕМАТИЧЕСКОЙ И ЦИКЛИЧЕСКОЙ ПОГРЕШНОСТЕЙ ЗУБЧАТЫХ КОЛЕС | 1972 |
|
SU335529A1 |
| Устройство для измерения функции распределения случайной погрешности аналого-цифровых преобразователей | 1984 |
|
SU1246370A1 |
| Устройство для вычисления массы нефти и нефтепродуктов в резервуарах | 1983 |
|
SU1117653A1 |
| Цифровой измеритель несимметрии трехфазной сети | 1978 |
|
SU746336A1 |
| Фазометрическое устройство | 1978 |
|
SU779907A1 |
| Адаптивный статистический анализатор | 1987 |
|
SU1434453A1 |
| Устройство для контроля окружного шага и накопленной погрешности зубчатых колес | 1989 |
|
SU1719880A1 |
| Цифровой фазометр | 1979 |
|
SU879498A1 |
